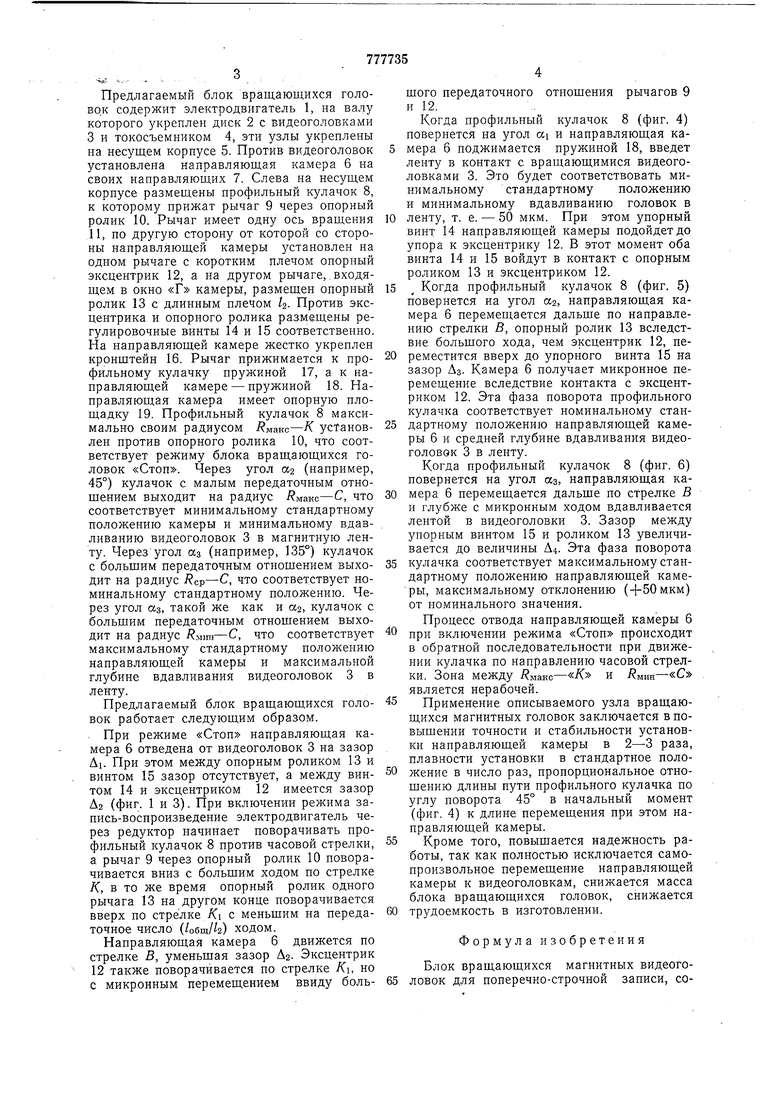
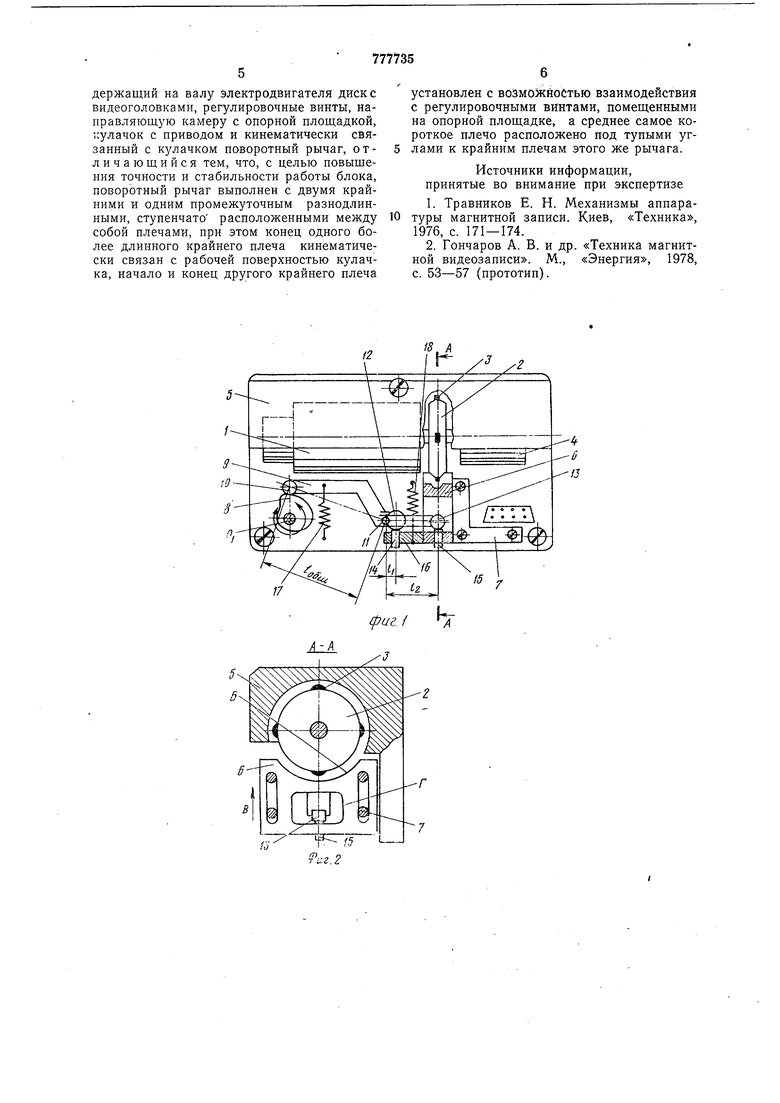
Предлагаемый блок вращающихся головок содержит электродвигатель 1, на валу которого укреплен диск 2 с видеоголовками 3 и токосъемником 4, эти узлы укреплены на несущем корнусе 5. Против видеоголовок установлена направляющая камера 6 на своих направляющих 7. Слева на несущем корнусе размещены нрофильный кулачок 8, к которому прижат рычаг 9 через опорный ролик 10. Рычаг имеет одну ось вращения 11, по другую сторону от которой со стороны направляющей камеры становлен на одном рычаге с коротким нлечом опорный эксцентрик 12, а на другом рычаге,. входящем в окно «Г камеры, размещен опорный ролик 13 с длинным плечом /2. Против эксцентрика и опорного ролика размещены регулировочные винты 14 и 15 соответственно. На направляющей камере жестко укреплен кронштейн 16. Рычаг прижимается к профильному кулачку пружиной 17, а к направляющей камере - пружиной 18. Направляющая камера имеет опорную площадку 19. Профильный кулачок 8 максимально своим радиусом RwaKc-K установлен нротив опорного ролика 10, что соответствует режиму блока вращающихся головок «Стоп. Через угол а2 (например, 45°) кулачок с малым передаточным отнощением выходит на радиус макс-С, что соответствует минимальному стандартному положению камеры и минимальному вдавливанию видеоголовок 3 в магнитную ленту. Черезугол «з (например, 135°) кулачок с больщим передаточным отношением выходит на радиус ср-С, что соответствует номинальному стандартному положению. Через угол аз, такой же как к «2, кулачок с большим передаточным отношением выходит на радиус / мпн-С, что соответствует максимальному стандартному положению направляющей камеры и максимальной глубине вдавливания видеоголовок 3 в ленту.
Предлагаемый блок вращающихся головок работает следующим образом. . При режиме «Стон направляющая камера 6 отведена от видеоголовок 3 на зазор АЬ При этом между опорным роликом 13 и винтом 15 зазор отсутствует, а между винтом 14 и эксцентриком 12 имеется зазор А2 (фиг. 1 и 3). При включении режима запись-воспроизведение электродвигатель через редуктор начинает поворачивать профильный кулачок 8 против часовой стрелки, а рычаг 9 через опорный ролик 10 поворачивается вниз с большим ходом по стрелке К, в то же время опорный ролик одного рычага 13 на другом конце поворачивается вверх по стрелке /Ci с меньшим на передаточное чцслО (/общ/ 2) ходом.
Направляюшая камера 6 движется по стрелке В, уменьшая зазор Л2. Эксцентрик 12 также поворачивается по стрелке Ki, но с микронным перемещением ввиду больщого передаточного отношения рычагов 9 и 12.
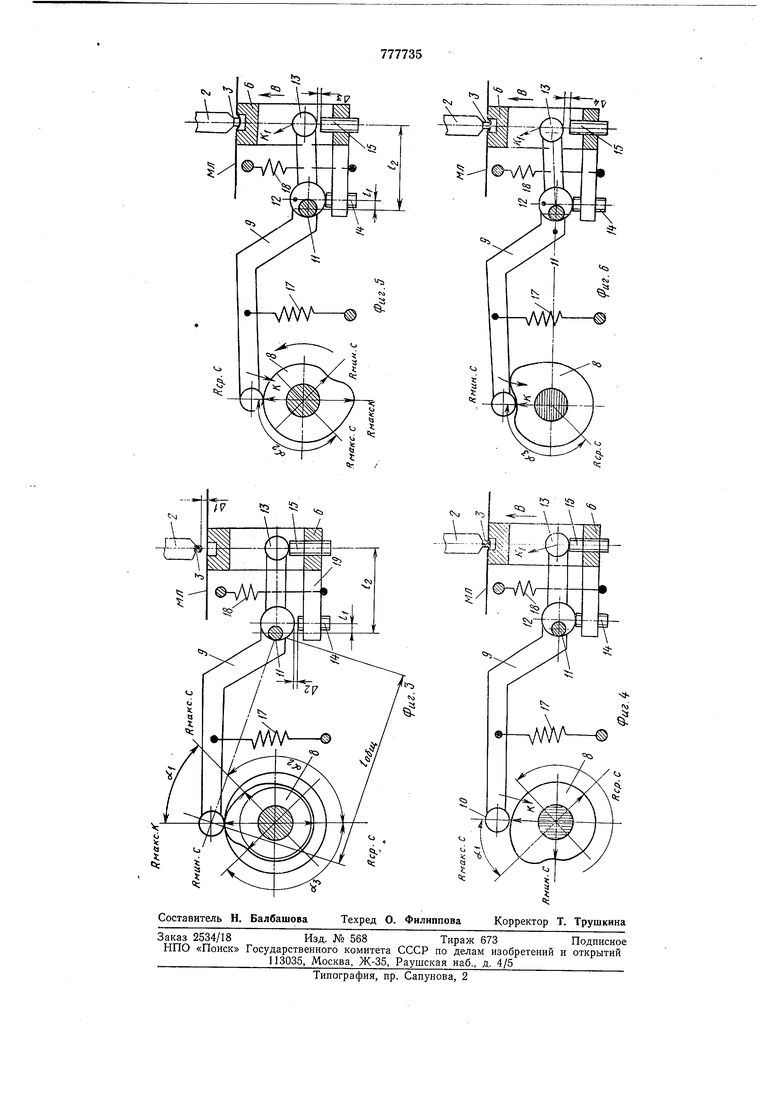
Когда профильный кулачок 8 (фиг. 4) повернется на угол ai и направляющая камера 6 поджимается пружиной 18, введет ленту в контакт с вращающимися видеоголовками 3. Это будет соответствовать минимальному стандартному положению и минимальному вдавливанию головок в
ленту, т. е. - 50 мкм. При этом упорный винт 14 направляющей камеры подойдет до упора к эксцентрику 12. В этот момент оба винта 14 и 15 войдут в контакт с опорным роликом 13 и эксцентриком 12.
, Когда профильный кулачок 8 (фиг. 5) повернется на угол az, направляющая камера 6 перемещается дальще по направлению стрелки S, опорный ролик 13 вследствие большого хода, чем эксцентрик 12, переместится вверх до упорного винта 15 на зазор АЗ. Камера 6 получает микронное перемещение вследствие контакта с эксцентриком 12. Эта фаза поворота профильного кулачка соответствует номинальному стандартному ноложению направляющей камеры 6 и средней глубине вдавливания видеоголовок 3 в ленту.
Когда профильный кулачок 8 (фиг. 6) повернется на угол из, направляющая камера 6 перемещается дальше по стрелке В и глубже с микронным ходом вдавливается лентой в видеоголовки 3. Зазор между упорным винтом 15 и роликом 13 увеличивается до величины А4. Эта фаза поворота
кулачка соответствует максимальному стандартному положению направляющей камеры, максимальному отклонению (+50 мкм) от номинального значения. Процесс отвода направляюшей камеры 6
при включении режима «Стоп происходит в обратной последовательности при движении кулачка по направлению часовой стрелки. Зона между / макс-«К и мин-«С
является нерабочей.
Применение описываемого узла вращающихся магнитных головок заключается в повышении точности и стабильности установки направляюшей камеры в 2-3 раза, плавности установки в стандартное положение в число раз, пропорциональное отношению длины пути профильного кулачка по углу поворота 45° в начальный момент (фиг. 4) к длине перемешення при этом направляюшей камеры.
Кроме того, повышается надежность работы, так как полностью исключается самопроизвольное перемешение направляющей камеры к видеоголовкам, снижается масса блока вращающихся головок, снижается
трудоемкость в изготовлении.
Формула изобретения
Блок вращающихся магнитных видеоголовок для поперечно-строчной записи, содержащий на валу электродвигателя диске видеоголовками, регулировочные винты, направляющую камеру с опорной площадкой, 1:улачок с приводом и кинематически связанный с к глачком поворотный рычаг, отличающийся тем, что, с целью повышения точности и стабильности работы блока, поворотный рычаг выполнен с двумя крайними и одним промежуточным разнодлинными, ступенчато расположенными между собой плечами, при этом конец одного более длинного крайнего плеча кинематически связан с рабочей поверхностью кулачка, начало и конец другого крайнего плеча
установлен с возможностью взаимодействия с регулировочными винтами, помещенными на опорной площадке, а среднее самое короткое плечо расположено под тупыми углами к крайним плечам этого же рычага.
Источники информации, принятые во внимание при экспертизе
1.Травников Е. Н. Механизмы аппаратуры магнитной записи. Киев, «Техника,
1976, с. 171 - 174.
2.Гончаров А. В. и др. «Техника магнитной видеозаписи. М., «Энергия, 1978, с. 53-57 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| А. ТФ. В. К. Мачинский и В. П. Веклич \ , | 1972 |
|
SU333588A1 |
| Блок вращающихся видеоголовок | 1974 |
|
SU672645A1 |
| Лентопротяжный механизм видеомагтитофона | 1975 |
|
SU612280A2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ВИДЕОГОЛОВОК И УСТРОЙСТВО ДЛЯ СОЕДИНЕНИЯ ПОЛУБЛОКОВ ВИДЕОГОЛОВОК | 1991 |
|
RU2034340C1 |
| БОЕВОЙ МЕХАНИЗМ БЕСЧЕЛНОЧНОГО ТКАЦКОГО СТАНКА С ЗАЖИМНЫМИ ЧЕЛНОКАМИ | 1990 |
|
RU2071515C1 |
| Блок вращающихся видеоголовок | 1982 |
|
SU1107165A1 |
| Блок вращающихся головок наклонно-строчной записи | 1987 |
|
SU1501145A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПАРАМЕТРОВ МАГНИТНЫХ ВИДЕОГОЛОВОК | 1991 |
|
RU2018177C1 |
| Швейный полуавтомат для изготовления прямых петель | 1968 |
|
SU649765A1 |
| Загрузочное устройство | 1990 |
|
SU1745507A1 |
17
7
иг. / Ь
