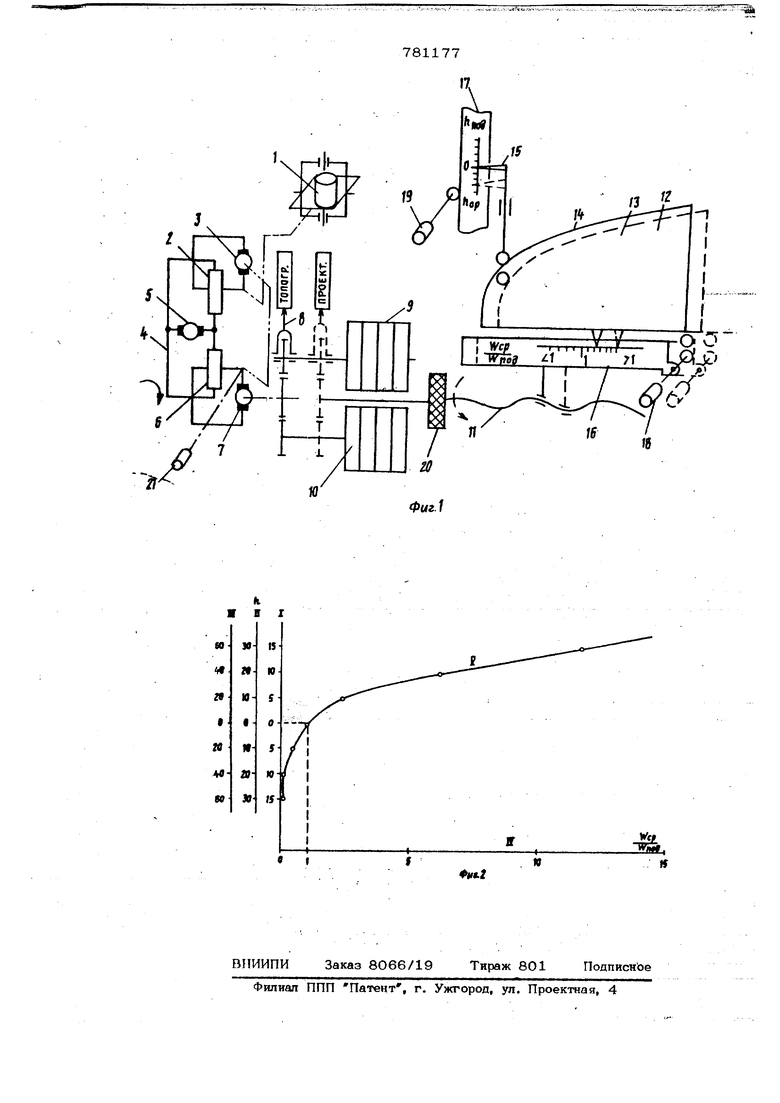
3 :, ..7 ПоСтаТвлённая цели досгигаегся гем, что в устройстве, содержащем мостовую измерительную схему с включенным в не потенциометром гидроскопического дат- чика угла наклона базы движителя, тахо- генератор напряжения пропорционального скорости его движения и интегрирующий элё стр6двигатель. Схема тахбгён1е|эйтс)15а снабжена вторым потенциометроК пита--, ния и вторым интйгр рующим электродвигателем, причем щетка второго потенциометра кинематически связана с валом первого интегрирующего двигателя, вал второго электродвигателя,установлен с возможностью селективньгр соё динёния с приводом каждого из двух счетчиков срезки и подсыпки объемов, которые через механизм ввода сортнощения этих ан1ач1 ний подключены к блоку индикации отметки горизонтальной проектной плосксюти. Механизм ввода соотношений объемов срезки и подсыпки выполнен в виде ходового винта и через винтовую : пару связан с блоком индикации рабочей отметки положения горизонтальной проектной плоскости, который выполнен в виде шаблона зависимости величин рабочиJt отметок этой плоскости от величин соотношения объемов срезки и подсыпки с возможностью перемещения вдоль одной из осей координат, причем поверхность кривой зависимости .сопряжена со стрелкой указателя шкалы, расположенной вдол другой рей координат. На фиг. 1 изображена кинематическая схемапредлагаемого устройства; на фиг. 2 - график зависимости значений рабочей отметки горизонтальной проектной плоскости от .соотношений объемов срезки и подсыпки грунта при планировочных работах.,,.,:.,,,,. ;, , t ,. Устройство для определения оптимальнбГЬйоложения проектной горизонтальной плоскости включает в себя гироскопический датчик 1 угла наклона, который кинемат11чески сьязан с движком потенциометра 2 писания электродвигателя 3. По тенциометр 2 включен в одной из плеч мостовой йзмерительнрй схемы 4, в диагоМлЬ которой подключен тахогенератор 5, питающий схему напряжением, пропорциональный скорости движения. . В другое плечо схемы, 4 включен по тенциоме р б питания Щэугi№or элёк родвигателя 7. Вал электродвигателя 3 кинематически (например, через червячный редуктор) связан с движком потейЦИОйётра 6, вал электродвигателя 7 - с редуктором 8, Й1Э1рщим возможность селективн 7 го подключения пары счетчиков 9 и Ю к валу электродвигателя или к механизму 11 ввода соотношений значений на счетчиках. Механизм 11 ввода связан с блоком 12 индикации отметки горизонтальной проектной плоскости. Привод счетчи- ков 9 и l6 выполнен таким образом, что при их соединении с валом электродвигателя 7 каждому счетчику соответсвует только свое направление вращения вала. Это может быть выполнено, наприМер, при передаче вращения с помощью храповых пар. Блок 12 индикации отметки горизонтальной проектной плоскости представлен в виде Шаблона 13, имеюще- го криволинейную поверхность 14, с которой контактирует шток стрелки 15 указателя рабочей отметки горизонтальной проектной плоскости. Криволинейная поверхность 14 шаблона 13 копирует кривую графика зависимости значений проектных рабочих отметок (отметок горИи- зонтальных проектных плоскостей) от величию соотношения объемов срезки и подсыпки при планировочных работах,, соответственно образуемых при данных значениях отметок проектных плоскостей. Этот график зависимости построен в прямоугольных координатах, где на оси абсцисс и, соответственно, на горизонтальной шкале 16 блока 12 отложены значения отношений объемов срезки к объемам подсыпки, а на оси ординат и, соответственно, на вертикальной шкале 17 - относительные значения рабочих отметок горизонтальных плоскостей. Шаблон 13 и шкалы 16 и 17 установлены на обш;ем шасси в блоке 12, причем шкалы 16 и 17установлены относительно шаблона с возможностью горизонтального и вертикального смещения с помощью ручек 18 и 19j соответственно. При таком варианте выполнения блока 12 индикации отметки горизонтальной проектной плоскости механизм 11 ввода соотношений значений счетчиков 9 и 10 может быть выполнен в виде пары ходовой винтгайка, связывающий приводы счетчиков 9 и 10 со шкалой 16 блока 12. Для удобства ручного управления механизм 11 снабжен ручкой 2О. Для установки в среднее Положение движок потенциометра 7 имеет ручку 21, В другом варианте выполнения предлагаемого устройства блок индикации рабочей отметки горизонтальной проектной плоскости может быть выполнен в виде электронного калькулятора по заранее введенной математической зависимости и вводимой величине со5 78 отношения со счетчиков 9 и 10, выдаю- щего значение оптимального положения горизонтальной плоскости. Работа устройства заключается в следующем. Перед йачалом топосъемки участок провешивается на створы, Между котррыми равное расстояние. Начальный и ко- нечный створы отстоят от границ участка на половину межстворного рассгояния. Длина створов одинаковая. На точку начала первого створа подводится механизм с устройством на борту и устанавливается по направлению створа. Предварительно на счетчиках 9 и 10 выставляются йулевые значения и движок потенциометра б с помощью ручки 21 подводится к средней точке. Вал интегрирующего электродвигателя 7 через редуктор 8 подключен к приводам счётчиков 9 и 10, которые отключены от ходового винта „ 11. После настройки устройства начинается движение механизма на веху, установленную в конце первого створа, например, в начале пути подъем, а затем понижение линии рельефа от отсчетной линии горизонта, проведенной на уровне отметки земли начальной точки. Еще до начала движения гироскопический датчик угла 1 наклона- фиксирует подъем и смещает токосъемную щетку потенциометра 2 в соответствующую сторону от средней точки. Как только тахогенератор 5 станет вырабатывать ток, начинает вращаться интегрирующий двигатель 3, и токосъемная щетка потенциометра 6 начинает отходить от средней точки. Приходит во вращение и второй интегрирующий двига:.тель 7. На одном из счетчиков 9 или 10 накапливается площадь срезки, т. е. площадь, лежащая выше отсчетной линии горизонта. В наивысшей точке подъема перед спуском-гироскопический - датчик угла ,аклона зафиксирует горизонтальное положение базы механизма, токосъемная щеткапотенциометра 2 будет в среднем положении, а токосъемная щетка потенциометра 6 - в крайнем. За точкой пере« гиба интегрирующий двигатель 3 вращается уже в противоположную сторону. Ин тегрирующий двигатель 7 продолжает вращаться еще в том же направлении, постепенно замедляясь по мере уменьшения угла смещения токосъемной щетки по потенциометру 6. В точке пересечения ли- НИИ рельефа с отсчетной линией горизон- та токосъемная щетка потенциометра б находится против сродней точки, и второй интегрирующий авигатель 7 останавливает76ся. По прохождении указанной точки второй инт&грирующий двигатель 7 начинает вращаться в противоположную сторону и накапливает на другом счетчике 10 значения площади подсыпки. Так продолжает ся -до конца створа. Если движение в/ створе бьшо по синусоиде относительно от::четной линии горизонта, то в конце створа на счетчиках 9 и 10 набирается одинаковое количеств осрезок и подсыпок. /Ьлее механизм с устройством продолжает ту же работу на следующем створе и т. д. В результате на счетчирах 9 и 10 накапливается суммарная площадь срезок и подсыпок от одной, общей для всех створов, отсчетной плоскости горизонта, проведенной на уровне начальной точки. Объемы земляных работ могут быть определены путем умно-, жения площади срезок и подсьгпок (показаний на счетчиках 9 и 10) на межстворное расстояние. Так как при проведении планировочньтх работ оптимальным считается вариант, когда объем срезок пре- вышает объем подсыпок на 25-30%, то отсчетную горизонтальную плоскость необходимо поднять или опустить до полу- . чеНия соответствующих значений показаний на счетчиках 9 и 10, т. е. до про- ектного положения. Для этого при помощи редуктора 8 отключается от привода счетчиков 9 и 10 вал интегрирующего двигателя 7 и подключается к ним ходовой винт механизма 11 ввода соотно- шений значений. Арифметическим делекием площади срезки на площадь подсыпки по показаниям счетчиков 9 и 10. объемов срезки и подсыпки определяется величина, на которую по шкале 16 отно- ; шений срейок-подсыпок устанавливает- р стрелка шаблона 13 с помощью ручки 18. Эта величина может быть больше единицы или меньше (на фиг. 1 показано положение больше единицы). Вручную с помощью ручки 19 подводится под Стрелку 15 ноль шкалы 17 рабочих отметок и заканчивается подготовка устройства к проектированию. . Поворотами барашка 2О осуществляется баланс показаний на счетчиках 9 и 10 (большие показания уменьшаются, а меньшие - увеличиваются). Одновременно с балансировкой показаний блоков накоп- ления площадей срезок-подсыпок осуществяяется перемещение Шаблона 13 вместе со шкалой 16 вправо или влево (на чертеже показано правое перемещение). Сместится точка кача11ия ролика по обраэующей шаблона, опуская или поднимая стрелку 15 ог нуля по шкале 17 рабочи отметок начальной .точки. Как только же лаемое соотношение подсыпки-срезки достигнуто, перемещения прекращаются, и положение стрелки 15 показывает велич ну и знак рабочей отметки начальной то ки, т. е. на сколько следует опустить или поднять Горизонтальную плоскость отсчета до проектного положения. Шка ла 17 рабочих отметок съемная. Для каждой категории сложности; релЪефа (рельеф спокойный, средний и сложный) своя шкала. Инструментальное «ивелирование дает отметку земли в начальной точке. Алгеб раическая сумма отметки земли и рабочей отметки в начальной точке и дает отметку горизонтальной проектной плоскости. Произведение показаний блоков накопления гШощацей срезок-подсыпок, выраженных в А на расстояние между створами в м, дает проектные объемы земляных работ в м . Формула изобретений 1. Устройство для определения оптимального положения проектной горизонтальной плоскости при планировке, coaefv жащее мостовую измерительную схему с включенным в нее потенциометром гироскопического датчика угла наклона базы дВ|И кителя, тахогенератор напряжения прдпорционального скорости его движения и интегрирующей электродвигатель, отличающееся ем, что, с целью исключения камеральной обработки, схема тахогенерагора снабжена вторым потенциометром питания и вторым интегрирующим электродвигателем, причем щетка второго потенциометра кинематически связана с валок первого ин- теЬрирующего двигателя, вал второго электродвигателя установлен с возможностью селективного соединения с приводом каждого из двух счетчиков объемов срезки и подсыпки,которые через механизм ввода соотношения этих значений подключены к блоку индикации рабочей отметки горизонтальной проектной плоскости. 2. Устройство по п. 1, отличающееся тем, что механизм ввода соотношений объемов срезки и подсыпки выполнен в виде ходового винта и через винтовую пару связан с блоком индикации рабочей отметки горизонтальной проектной плоскости, выполненным в виде шаблона зависимости значений проектных отметок от величины соотношения бъемов срезки и подсыпки, с возможностью перемещения шаблона вдоль одной из осей координат, пцичём поверхность кривой зависимости сопряжена со стрелкой указателя шкалы, расположенной вдоль другой оси координат. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 192418, кл. Q 01 С 7/04, 25.11.1963. 2.Авторское свидетельство СССР NT 160840, кл. Q 01 С 19/44, 17.О4.1963 (прототип).
N
4i,...,.y,y
9-
T V
1Я 1 I I 1 I I II г
}
flia ft l 7f
Ijc 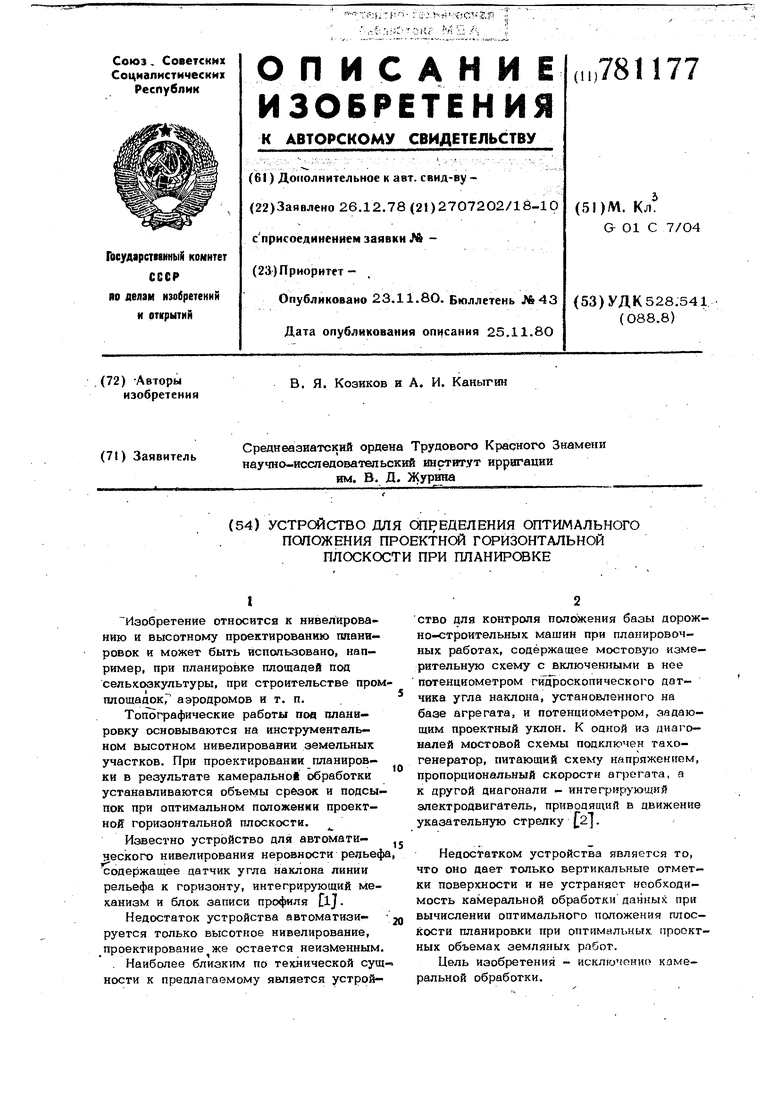


| название | год | авторы | номер документа |
|---|---|---|---|
| Длиннобазовый планировщик | 1977 |
|
SU670691A1 |
| СПОСОБ И УСТРОЙСТВО ПЛАНИРОВКИ ОРОШАЕМЫХ ЗЕМЕЛЬ | 2008 |
|
RU2399197C2 |
| СПОСОБ ПЛАНИРОВКИ ОРАШАЕМЫХ ЗЕМЕЛЬ И УСТРОЙСТВО ДЛЯ ПЛАНИРОВКИ ОРОШАЕМЫХ ЗЕМЕЛЬ | 2001 |
|
RU2240681C2 |
| Почвообрабатывающее орудие | 1989 |
|
SU1724044A1 |
| СПОСОБ ПЛАНИРОВКИ ЗЕМЕЛЬ | 2017 |
|
RU2689467C1 |
| Планировщик | 1990 |
|
SU1768718A1 |
| НИВЕЛИР-АВТОМАТ | 1971 |
|
SU295974A1 |
| Устройство для определения отметок продольного профиля трассы | 1985 |
|
SU1262285A1 |
| Способ планировки рисовых чеков | 1984 |
|
SU1288274A1 |
| АВТОМАТИЧЕСКАЯ УСТАНОВКА ДЛЯ МЕТРОЛОГИЧЕСКИХ | 1971 |
|
SU310205A1 |