Изобретение относится к измерению веса вещества в емкостях, наполнение и опорожнение которых осуществляется определенными порциями, и может быть использовано в сельском хозяйстве для дистанционного контроля, например веса зерна в силосньгх бёшнях. Известны устройства, в которых контроль веса вещества в емкости достигается посредством измерения давления жидкости, развивающегося в мессдозе, расположенной между одной иэ опор емкости и фундаментом 1. Недостаток устройств - низкая точ ность при малой нагрузке, а при воз действии факторов окружающей среды,, например, ветра - искаженные показания, кроме того малая дистанционност контроля, которая не превышает Юм. Наиболее близким по технической сущности к предлагаемому является устройство для непрерывного дистанционного контроля ещества в емкости содержащее датчики веса, установленные на входе и выходе из емкости, и блок обработки сигналов с шаговыми двигателями и указателем веса 2. Однако устройство сложно по конст рукции, так как содержит элементы электронно-вычислительной техники и для настройки, обслуживания и ремонта его требуются специалисты высокой квалификации. Кроме того, контроль веса, вещества в емкости, например зерна в сйлйсйыХ баинях, невозможен при одновременном наполнении и опорожнении емкости. Цель изобретения - упрощение конструкции и расширение функциональных возможностей устройства. Поставленная цель достигается тем, что блок обработки сигнала выполнен в виде механического дифференциала, ведущие шестерни которого кинемати-. чески связаны с шаговыми дв1игателями, первый иэ KOTOjaix злектричё9ки связан с датчике веса на входе емкости, а второй - с датчиком веса на выходе емкости, при этом указатель веса выпблйгёГ в Гегадуйрованного диска, связанного с шестернйми сателлитами дифференциала. На фиг. 1-4 показано устройство для непрерывного дистанционного контроля веса вацества в емкости. Устройство содержит емкость 1, в которой находится, например, сыпучее вещество 2, вес которого необходимо
контролировать. Датчик 3 веса поступаюгдего вещества установлен на питате-, ле 4,. предназначенном для подачи вещества в емкость 1. Датчик 5 веса рас ойуёмогЬ вещества установлен на дозаторе 6, предназначенном для рас- , хода вещества из емкости 1.
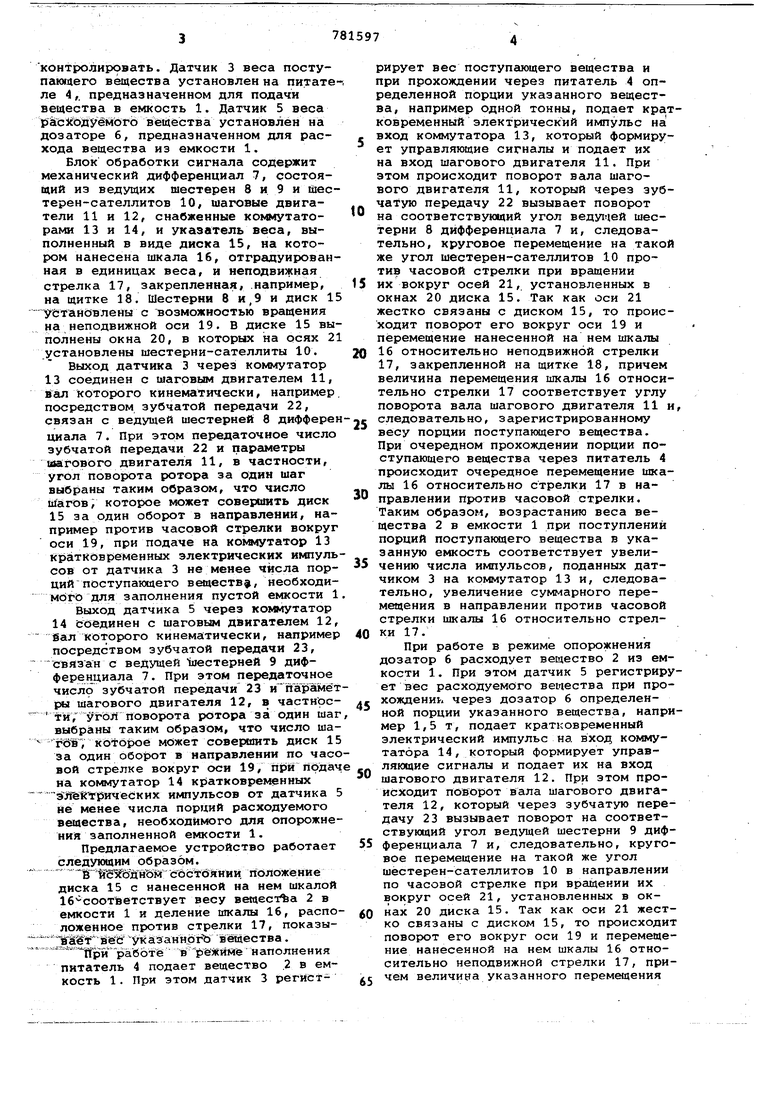
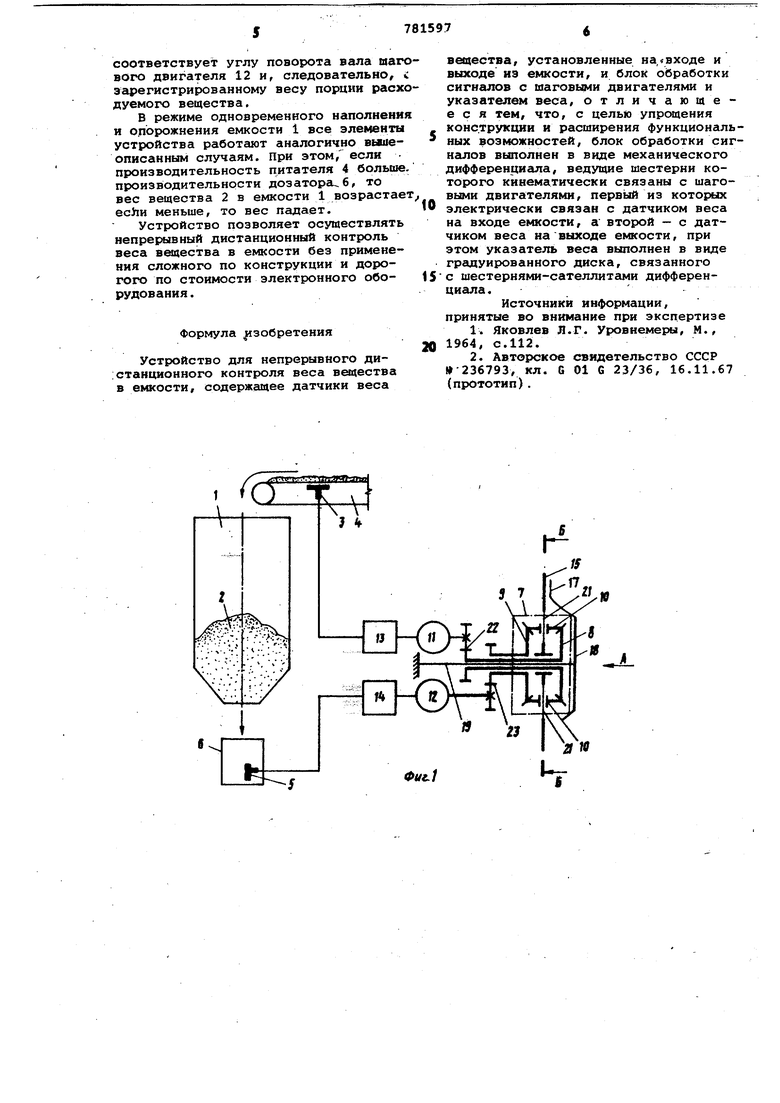
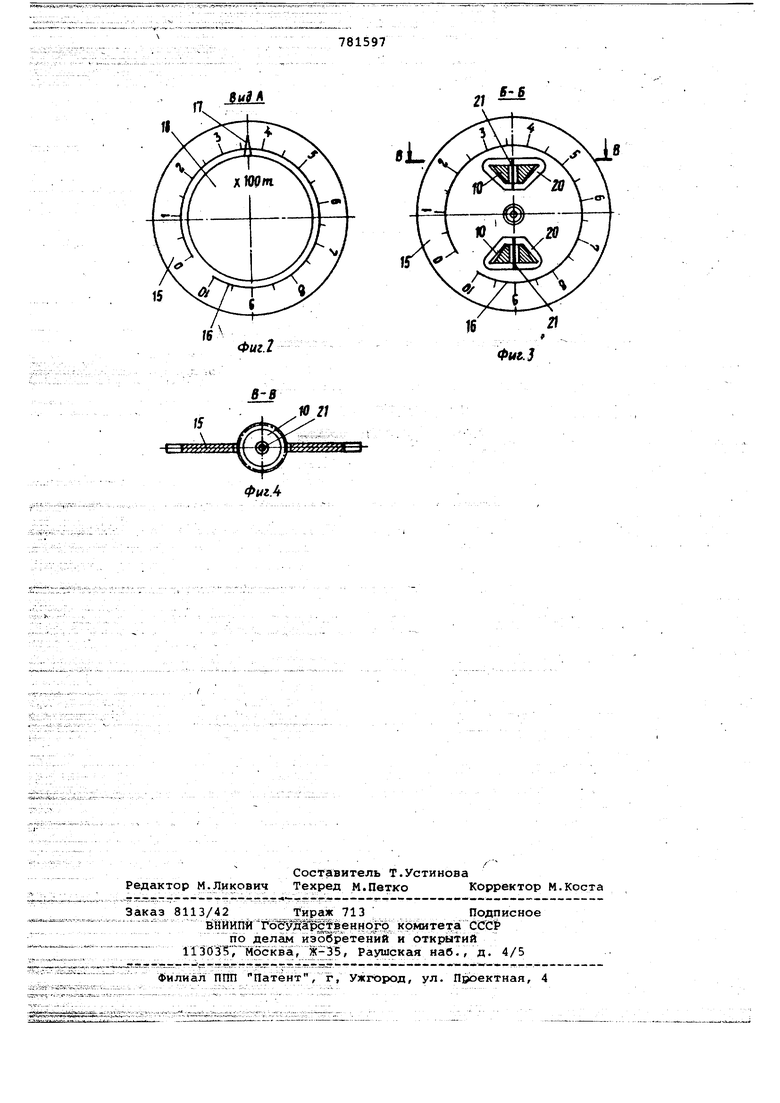
Блок обработки сигнала содержит механический дифференциал 7, состоящий из ведущих шестерен 8 и 9 и Шестерен-сателлитов 10, шаговые двига- . тели 11 и 12, снабженные кокмутато- рами 13 и 14, и указатель веса, выполненный в виде диска 15, на котором нанесена шкала 16, отградуированная в единицах веса, и неподвижная стрелка 17, закрепленная, .например, 15 на щитке 18. Шестерни 8 и,9 и диск 15 Установлены с возможностью вращения на неподвижной оси 19. В диске 15 выполнены окна 20, в которых на осях 21 установлены шестерни-сателлиты 10. 20
Выход датчика 3 через коммутатор 13 соединен с шаговым двигателем 11, вал которого кинематически, например, посредством зубчатой передачи 22, связан с ведущей шестерней 8 дифферен-2е циала 7. При этом передаточное число зубчатой передачи 22 и параметры taaroBoro двигателя 11, в частности, угол поворота ротора за один шаг выбраны таким образом, что число j. шагов, которое может совершить диск 15 за один оборот в направлении, например против часовой стрелки вокруг оси 19, при подаче на коьадутатор 13 Кратковременных электрических импульсов от датчика 3 не менее числа порций поступающего веществу, необходимого для заполнения пустой емкости 1.
Выход датчика 5 через коммутатор 14 соединен с шаговым двигателем 12, еал которого кинематически, например 40
посредством зубчатой передачи 23, связан с ведущей шестерней 9 дифференциала 7. При этом передаточное число зубчатой передачи 23 ипа рамётры шагового двигателя 12, в частное- j тй, угол поворота ротора за один шаг, выбраны таким образом, что число , которое может совершить диск 15 за один оборот в направлении по часовой стрелке вокруг оси 19, при подаче - на коммутатор 14 кратковременных -э лё1г рических импульсов от датчика 5 не менее числа порций расходуемого вещества, необходимого для опорожнения заполненной емкости 1.
Предлагаемое устройство работает 55 следующим образом. ЙШднШгсбс сШнии положение диска 15 с нанесенной на нем шкалой le - cooTBeTcTByeT весу вещества 2 в емкости 1 и деление шкалы 16, распо- д ложенное против стрелки 17, показы iTaeTвес указаннргЬ вещества.
IfpH работе в режиме наполнения питатель 4 подает вещество .2 в емкость 1. При этом датчик 3 регист- 5
рирует вес поступающего вещества и при прохождении через питатель 4 определенной порции указанного вещества, например одной тонны, подает кратковременный электрический импульс на вход коммутатора 13, который формирует управляющие сигналы и подает их на вход шагового двигателя 11. При этом происходит поворот вала шагового двигателя 11, который через зубчатую передачу 22 вызывает поворот на соответствующий угол ведущей шестерни 8 дифференциала 7 и, следовательно, круговое перемещение на такой же угол шестерен-сателлитов 10 против часовой стрелки при вращении их вокруг осей 21, установленных в окнах 20 диска 15. Так как оси 21 жестко связаны с диском 15, то происходит поворот его вокруг оси 19 и перемещение нанесенной на нем шкалы 16 относительно неподвижной стрелки 17, закрепленной на щитке 18, причем величина перемещения шкалы 16 относительно стрелки 17 соответствует углу поворота вала шагового двигателя 11 и следовательно, зарегистрированному весу порции поступающего вещества. При очередном прохождении порции поступающего вещества через питатель 4 происходит очередное перемещение шкалы 16 относительно стрелки 17 в направлении Против часовой стрелки. Таким образом, возрастанию веса вещества 2 в емкости 1 при поступлений порций поступаквдего вещества в указанную емкость соответствует увеличению числа импульсов, поданных датчиком 3 на коммутатор 13 и, следовательно, увеличение суммарного перемещения в направлении против часовой стрелки шкалы 16 относительно стрелки 17.
При работе в режиме опорожнения дозатор 6 расходует вещество 2 из емкости 1. При этом датчик 5 регистрирует вес расходуемого вещества при прохождениь через дозатор 6 определенной порции указанного вещества, например 1,5 т, подает кратковременный электрический импульс на вход коммутатора 14, который формирует управляющие сигналы и подает их на вход шагового двигателя 12. При этом происходит поворот вала шагового двигателя 12, который через зубчатую передачу 23 вызывает поворот на соответствующий угол ведущей шестерни 9 дифференциала 7 и, следовательно, круговое перемещение на такой же угол шестерен-сателлитов 10 в направлении по часовой стрелке при вращении их вокруг осей 21, установленных в окнах 20 диска 15. Так как оси 21 жестко связаны с диском 15, то происходит поворот его вокруг оси 19 и перемещение нанесенной на нем шкалы 16 относительно неподвижной стрелки 17, причем величина указанного перемещения соответствует углу поворота вала шаг вого двигателя 12 и г следовательно, зарегистрированному весу порции расх дуемого вещества. В режиме одновременного наполнени и опорожнения емкости 1 все элементы устройства работают аналогично вышеописанным случаям. При этом, если производительность питателя 4 больше производительности дозатора б, то вес вещества 2 в емкости 1 возрастае echH меньше, то вес падает. Устройство позволяет осуществлять непрерывный дистанционный контроль веса ветцества в емкости без применения сложного по конструкции и дорогого по стоимости злектронного оборудования. Формула |€зобретения Устройство для непрерывного ди:станционного контроля веса вещества в емкости, содержащее датчики веса вещества, установленные на,«входе и выходе из емкости, и блок обработки сигналов с шаговыми двигателями и указателем веса, отличающееся тем, что, с целью упрсяцения конструкции и расширения функциональных возможностей, блок обработки сигнгшов выполнен в виде механического дифференцисша, ведущие шестерни которого кинематически связаны с шаговыми двигателями, первый из которых электрически связан с датчиком веса на входе емкости, а второй - с датчиком веса на выходе емкости, при этом указатель веса выполнен в виде градуированного диска, связанного с шестернями-сателлитами дифференциала. Источники информации, принятые во внимание при экспертизе 1.Яковлев Л.Г. Уровнемеры, М., 1964, с.112. 2.Авторское свидетельство СССР W236793, кл. G 01 G 23/36, 16.11.67 (прототип).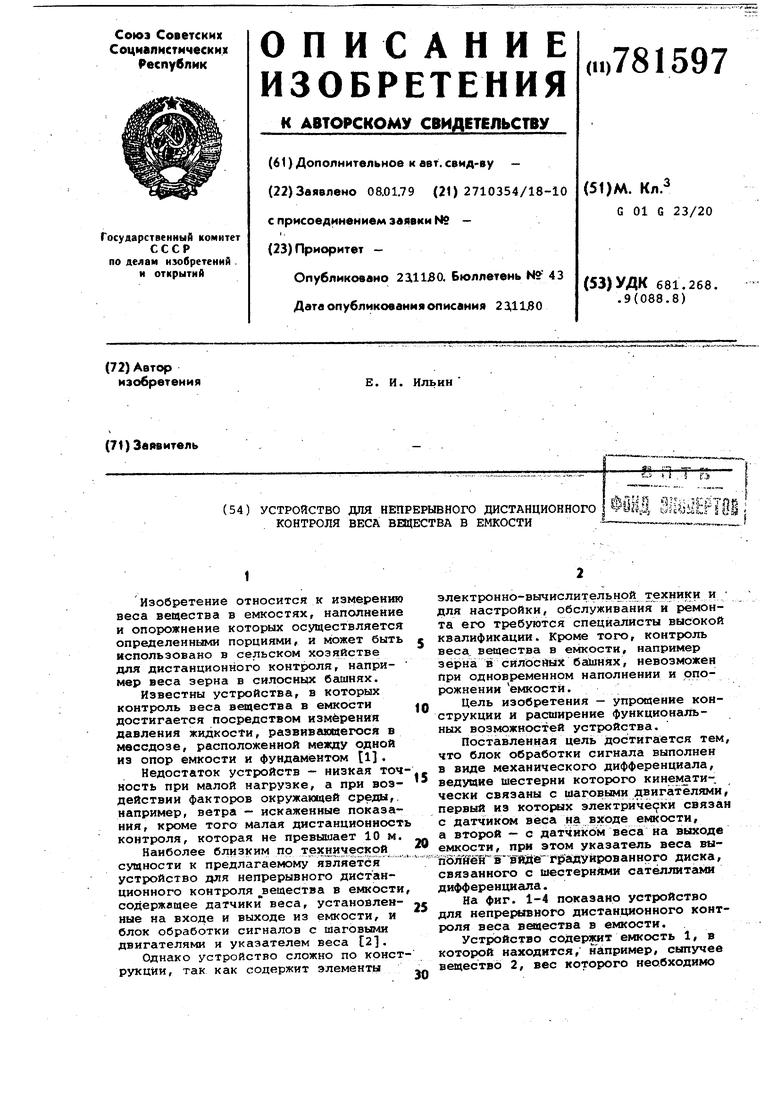
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод блока вакуумных клапанов | 1978 |
|
SU744143A1 |
| Механизм двухстрелочного указателя | 1982 |
|
SU1059150A1 |
| ДИФФЕРЕНЦИАЛ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2266448C2 |
| Устройство для контроля питателя хлопкового сырья | 1990 |
|
SU1831520A3 |
| ИНДИВИДУАЛЬНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2010 |
|
RU2422328C1 |
| АВТОМОБИЛЬНОЕ КРАНОВОЕ ШАССИ | 2018 |
|
RU2684838C1 |
| МОТОРНО-ТРАНСМИССИОННЫЙ МОДУЛЬ | 2011 |
|
RU2478045C1 |
| Устройство для полуавтоматической установки экспозиции в фотоаппарате | 1957 |
|
SU122021A1 |
| УСТРОЙСТВО ДЛЯ СВЕРЛЕНИЯ ОТВЕРСТИЙ ПОД ДАВЛЕНИЕМ УСО-70 | 2015 |
|
RU2603413C2 |
| ЧЕРВЯЧНО-ВИНТОВОЙ ДИФФЕРЕНЦИАЛ ПРЕИМУЩЕСТВЕННО ДЛЯ ЗАМЕНЫ ШТАТНЫХ ДИФФЕРЕНЦИАЛОВ, СМОНТИРОВАННЫЙ В ШТАТНЫХ РЕДУКТОРАХ ТРАНСПОРТНЫХ СРЕДСТВ | 2019 |
|
RU2730357C1 |
Bui А
fl
15
Фиг.2
Ю 21
В-6
