133767
Изобретение относится к весоизмерительной технике, в частности к ве- слм с электромагнитной компенсацией наг рузки.
Цель изобретения - повышение точ- ности.
На фиг.1 изображена схема конструкции электромагнитных весов; на
фиг.2 - структурная схема электричес
кой части; на фиг.З - график ной индукции в области расположения эталонной катушки.
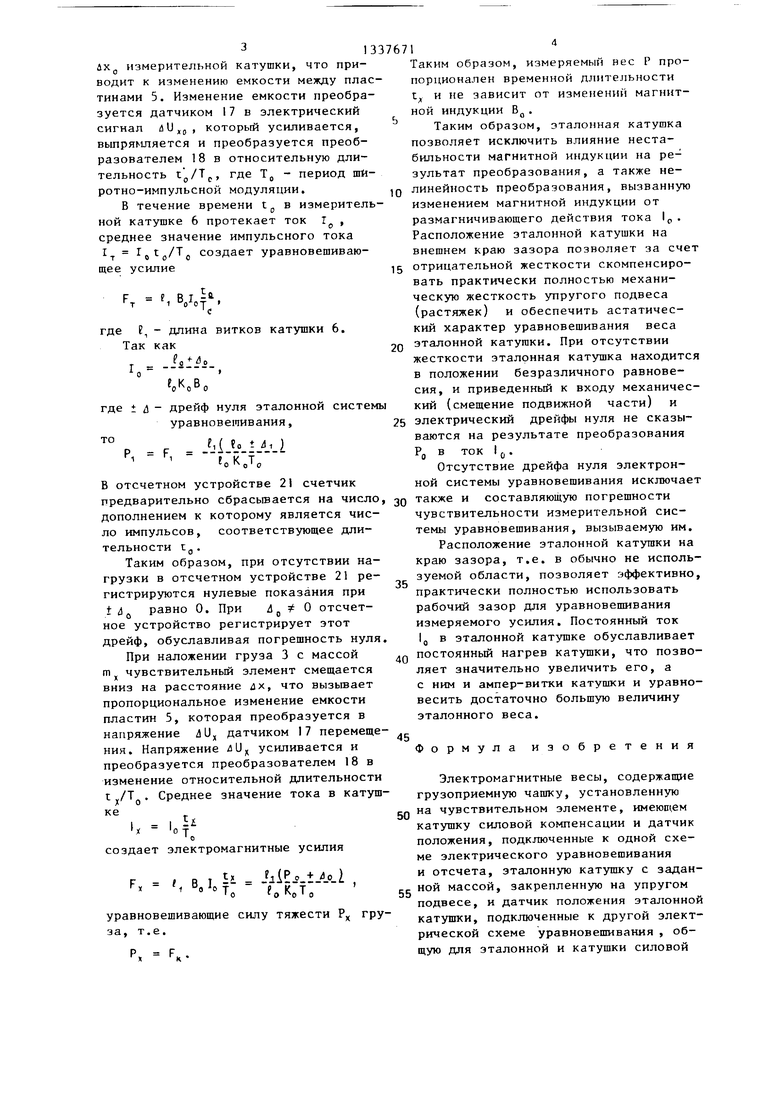
Электромагнитные весы содержат чувствительный элемент I с грузопри- емной чашкой 2 для измеряемого груза 3 с массой гп, упругую подвеску 4 чувствительного элемента 1, датчик перемещения чувствительного элемента например емкостный датчик, образован ный пластинами 5, одна из которых размещена на чувствительном элементе измерительную катушку 6 силовой компенсации, расположенную в рабочем зазоре магнитной системы. Магнитная система содержит постоянный магнит 7 с полюсным наконечником 8 и магнито- проводом 9 .На краю зазора между наконеником 8 и магнитопроводом 9 расположена эталонная катушка 10,несущая щелевой экран 1 I, с одной стороны которого установлен фотоприемник 12, с другой- осветитель 13, образующие фотодатчик перемещения эталонной катушки 10. Катушка 10 закреплена, например, с помощью трех радиально натянутых растяжек 14. Измерительная катушка 6 с помощью направляющих стоек 15, расположенных в пазах 16 магнитопровода 9, соединена с чувствительным элементом 1. Пластина 5 электрически соединена с входом датчика 17 перемещения выход которого соединен с преобразователем 18 напряжения dU во временной интервал, управляющий модулятором 19. Фотоприемник 12 подключен к усилителю 20 датчика перемещения эталонной катушки, токовый выход которо- г о подключен к входу модулятора 19. Выход последнего подключен к измерительной катушке 6. Последовательно к усилителю 20 тока подключена эталонная катушка 10. Отсчетное устройство 21 подключено к выходу преобразователя 18.
Электромагнитные весы работают следующим образом.
Эталонная катушка 10 заданной массы т, т.е. весом Р i в. расположе
0
5 Q
5
0
5
I2
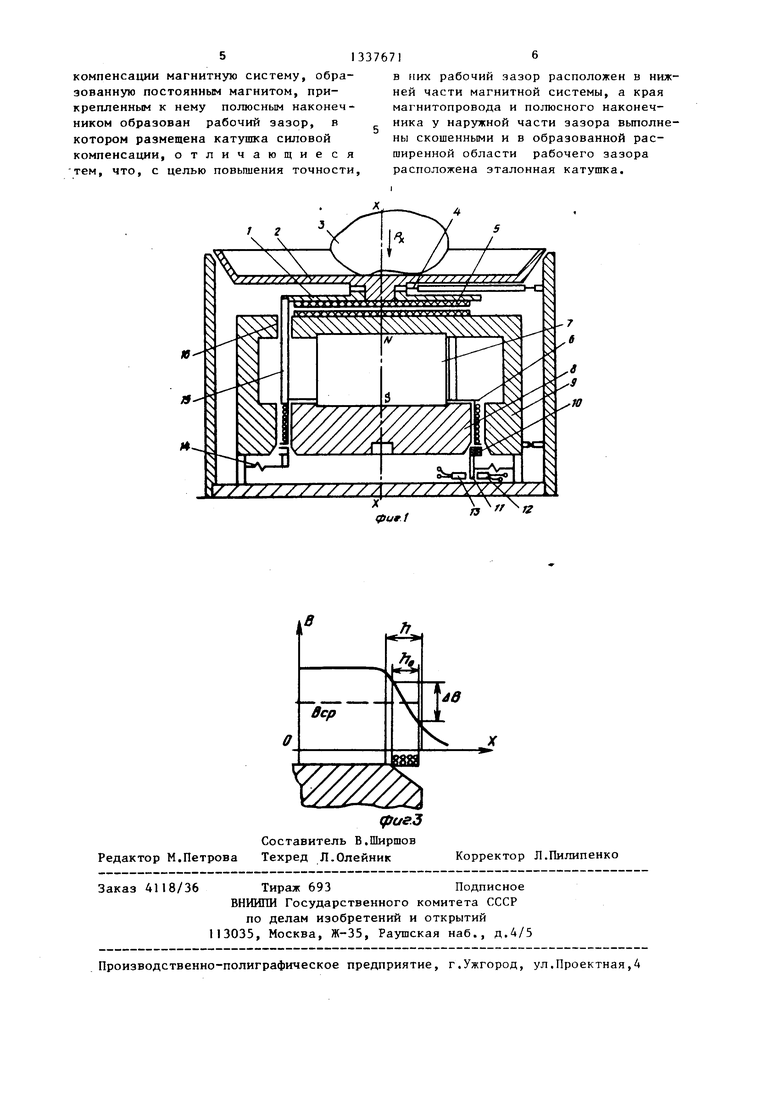
на на краю зазора магнитной системы, где края полюсного наконечника 8 и магнитопровода 9 выполнены скошенными, что обеспечивает постоянный градиент магнитной индукции dB/dx const в области края зазора, а высота h Ид - высоты эталонной катушки (фиг.З). Под действием заданного постоянного веса Р катушка 10 смещена вниз и сигнал dU с фотоприемника I2 усиливается и преобразуется усилителем 20 в постоянный ток Ijj , который проходит по катушке 10 с длиной витков Рр , создавая электромагнитное усилие
FBX FC - fx с IO(BCP + F Ь
где Вср среднее значение
индукции на краю зазора;
hj, - высота катушки; (3 X - смещение катушки. Таким образом, электромагнитное усилие FPJ, характеризуется постоянной составляющей F „1.8.,,,
о о о
1у ТцКрВр и переменной составляющей fx Wp. . dx, где W. PJ,,sB/ /h (отрицательная жесткость), зависящей от перемещения эталонной катушки, вес эталонной катушки Р , длина витков 1 и ток 1 рассчитываются таким образом, чтобы постоянная составляющая Fj, уравновешивала вес Р„, т.е. F Р„ Р,1,К,В,, а переменная f компенсировала усилие от жесткости W упругого подвеса (растяжки) при перемещении на лх, т.е. fj Wpdx. Усилие f является усилием отрицательной жесткости, которое создается соответствующим направлением тока 1 , обеспечивающим в то же время уравновешивание веса Р,. Это возможно только при расположении эталонной катушки на внешнем краю зазора. При расположении ее на внутреннем краю зазора одно направление тока 1 уравновешивает вес Р , но создает эффект положительной жесткости, другое направление 1 хотя и создает отрицательную жесткость, но сила F совпадает с направлением Р и не уравновешивает последний.
При отсутствии измеряемого груза 3 с массой т, т.е. Р т д, измерительная система нагружена собст- венньм весом Р - пассивной тары, которая вызывает начальное смещение
йХд измерительной катушки, что приводит к изменению емкости между пластинами 5. Изменение емкости преобразуется датчиком 17 в электрический сигнал йи,„, который усиливается, выпрямляется и преобразуется преобразователем 18 в относительную длигде Т(, - период шй- ротно-импульсной модуляции.
В течение времени t в измерительной катушке 6 протекает ток I среднее значение импульсного тока 1 создает уравновешивающее усилие
тельность
Ч/Т.
о
т BJЬa,
Т,
где Е, - длина витков Так как
г - : 0 оКсВ„
дрейф нуля эталонной системы уравновешивания,
- .Mj.o.Jj.I
F,
fcKJ,
В отсчетном устройстве 21 счетчик
предварительно сбрасьшается на число, JQ также и составляющую погрешности
дополнением к которому является число импульсов, соответствующее длительности Сд .
Таким образом, при отсутствии нагрузки в отсчетном устройстве 21 регистрируются нулевые показания при t JJ равно 0. При 4 g 7 О отсчет- ное устройство регистрирует этот дрейф, обуславливая погрешность нуля
При наложении груза 3 с массой m чувствительный элемент смещается вниз на расстояние лх, что вызьгоает пропорциональное изменение емкости пластин 5, которая преобразуется в напряжение dU,, датчиком 17 перемещения. Напряжение лУ усиливается и преобразуется преобразователем 18 в изменение относительной длительности t „/Tg. Среднее значение тока в катушке
х
I -i
создает электромагнитные усилия р , В I bi JjiP- -lAo.i ,
глло
уравновешивающие силу тяжести Р груза,
т.е.
РХ
Таким образом, измеряемый нес Р пропорционален временной длительности tj, и не зависит от изменений магнитной индукции BQ.
Таким образом, эталонная катушка позволяет исключить влияние нестабильности магнитной индукции на результат преобразования, а также нелинейность преобразования, вызванную изменением магнитной индукции от размагничивающего действия тока 1. Расположение эталонной катушки на внешнем краю зазора позволяет за счет
отрицательной жесткости скомпенсировать практически полностью механическую жесткость упругого подвеса (растяжек) и обеспечить астатический характер уравновешивания веса
эталонной катушки. При отсутствии
жесткости эталонная катушка находится в положении безразличного равновесия, и приведенный к входу механический (смещение подвижной части) и
электрический дрейфы нуля не сказываются на результате преобразования Рд в ток 1,.
Отсутствие дрейфа нуля электронной системы уравновешивания исключает
чувствительности измерительной системы уравновешивания, вызываемую им. Расположение эталонной катушки на краю зазора, т.е. в обычно не используемой области, позволяет эффективно, практически полностью использовать рабочий зазор для уравновешивания измеряемого усилия. Постоянный ток Ig в эталонной катушке обуславливает постоянный нагрев катушки, что позвояет значительно увеличить его, а с ним и ампер-витки катушки и уравновесить достаточно большую величину эталонного веса.
ормула изобретения
Электромагнитные весы, содержаш;ие грузоприемную чашку, установленную
на чувствительном элементе, имеющем катушку силовой компенсации и датчик положения, подключенные к одной схеме электрического уравновешивания и отсчета, эталонную катушку с заданной массой, закрепленную на упругом подвесе, и датчик положения эталонной катушки, подключенные к другой электрической схеме уравновешивания , общую для эталонной и катушки силовой
компенсации магнитную систему, образованную постоянным магнитом, прикрепленным к нему полюсным наконечником образован рабочий зазор, в котором размещена катушка силовой компенсации, отличающие ся тем, что, с целью повьпиения точности.
в них рабочий зазор расположен в нижней части магнитной системы, а края магнитопровода и полюсного наконечника у наружной части зазора выполнены скошенными и в образованной расширенной области рабочего зазора расположена эталонная катушка.
i, /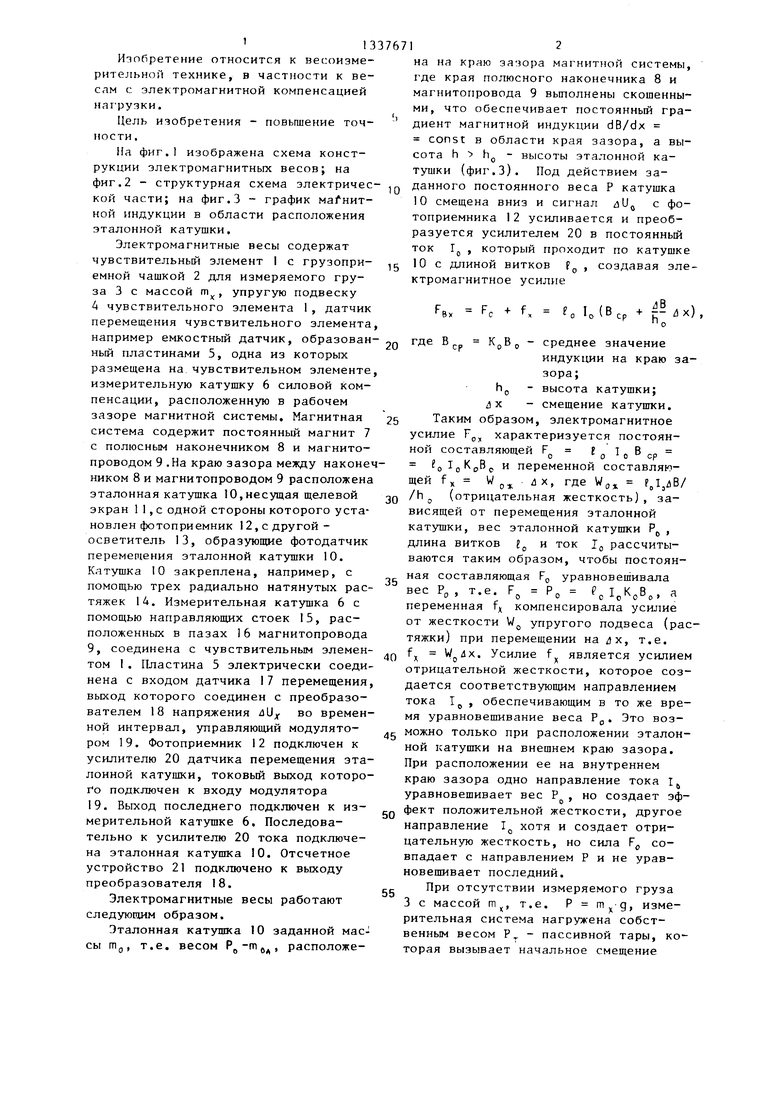
| название | год | авторы | номер документа |
|---|---|---|---|
| Весы с электромагнитным уравновешиванием | 1986 |
|
SU1394055A1 |
| Электромагнитные весы | 1979 |
|
SU838388A1 |
| Электромагнитные весы | 1979 |
|
SU800666A1 |
| Устройство для преобразования механических усилий | 1977 |
|
SU699363A1 |
| Электромагнитные весы | 1979 |
|
SU838389A1 |
| Электромагнитные весы | 1987 |
|
SU1597586A1 |
| Весы с электромагнитным уравновешиванием | 1982 |
|
SU1046619A1 |
| Электромагнитные весы | 1979 |
|
SU851106A1 |
| МАНОМЕТРИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ И ВОСПРОИЗВЕДЕНИЯ МАЛЫХ ДАВЛЕНИЙ ПОРШНЕВОЙ ПАРОЙ, ОБРАЗОВАННОЙ СТРУКТУРНО-СОПРЯЖЕННЫМИ МАГНЕТИКАМИ (ВАРИАНТЫ) | 2011 |
|
RU2489692C1 |
| Магнитоэлектрический динамометр | 1984 |
|
SU1182285A1 |
Изобретение относится к весам с электромагнитной компенсацией нагрузки. Цель изобретения - повьппение точности. Эталонная катушка 10 заданной массы расположена на краю зазора магнитной системы, где края полюсного наконечника и магнитопровода вьтолнены скошенными. Под действием заданного постоянного веса Р катушка 10 смещается вниз и сигнал с фотоприемника 12 усиливается и преобразуется усилителем 20 в постоянный ток 1о который проходит по катушке 10, создавая электромагнитное усилие.Расположение эталонной катушки 10 на краю зазора позволяет полностью использовать рабочий зазор для уравновешивания измеряемого усилия. Постоянный ток 1 в эталонной катушке 10 обуславливает ее постоянный нагрев, что позволяет увеличить нагрев, а с ним и ампер-витки катуш- с ки и уравновесить достаточно большую величину эталонного веса. 3 ил. (Л / (jO ОО с: gtue.Z
gjue.3
Составитель В.Ширшов Редактор М.Петрова Техред Л.Олейник
4118/36
Тираж 693Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
Корректор Л.Пилипенко
| Электромагнитные весы | 1983 |
|
SU1150492A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 3786883, кл | |||
| Кулисный парораспределительный механизм | 1920 |
|
SU177A1 |
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
