(54) ЗОНД ДЛЯ КОНТРОЛЯ МАГНИТНЫХ ПЕРИОДИЧЕСКИХ Изобретение относится к магнитным изме- рениям, а более конкретно к устройствам, измеряющим составляющие магнитной индукдаи с помощью датчиков Холла, и может быть использовано для автоматического контроля и экспериментального определения топографии маг нитного поля на оси магнитных периодических фокусирующих систем. Известен зонд с датчиками Холла, применяемый для измерения составляющих индукции магнитного поля на оси периодических фокусирующих систем. Зонд содержит два датчика Холла, измеряющих продольную и радиальную составляющие индукции магнитного поля на оси магнитной фокусирующей системы 1. Также известен измерительный зонд, содержащий цилиндрический корпус, опорную площадку для установки датчиков Холла и два датчика Холла, один из которых расположен своей плоскостью перпендикулярно оси зонда, а плоскость другого параллельна и совмещена с осью зонда. Контроль магнитных периодических фокусирующих систем заключается в измерении значения радиальной составляющей магнитной индукции.
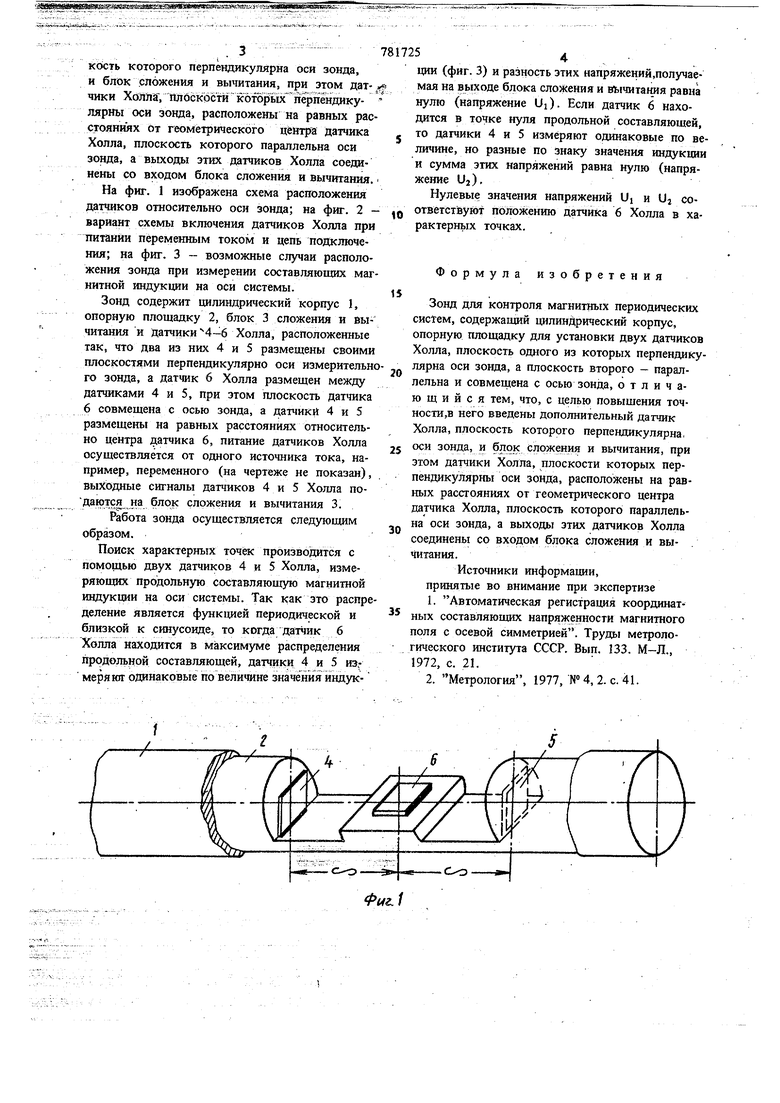
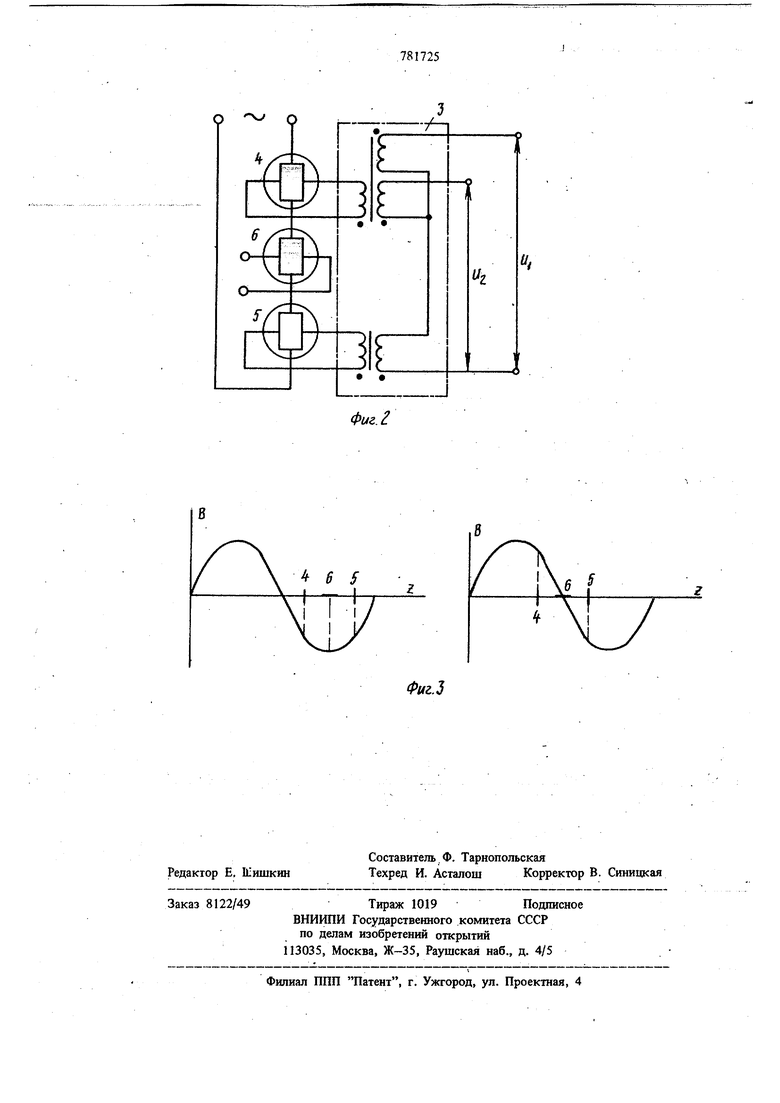
СИСТЕМ Характерными точками являются нули и максимумы распределения продольной составляющей на оси системы. Измерение радиальной составляющей осуществляется датчиком Холла, плоскость которого совмещена с осью зонда, а поиск характерных точек осуществляется датчиком, плоскость которого перпендикулярна оси зонда 2. Однако, такое выполнение зондов не обеспечивает требуемой точности контроля, в связи с трудностями определения точек максимума и необходимостью ручного перемещения зонда на расстояние, равное расстоянню между центрами датчиков. Цель изобретения - повыщение точности контропй. Поставленная цель достигается тем, что в зонд для контроля магнитнЬтх периодических систем, содержащий одлиндрический корпус, опорную площадку для установки двух датчиков Холла, плоскость одного из которых . перпендикулярна оси зонда, а плоскость второго - параллельна и совмещена с осью зонда, вводят дополнительный датчик Холла, гоюскЬсть которого перпендикулярна оси зонда, и блок сложения и вычитания, при ЭТОМ датчики ХолЩ Ш1бскосШ к6т6рьк П(фпендикулярны оси зонда, расположены на равных расстояниях от геометрического центра датчика Холла, плоскость которого параллельна оси зонда, а выходы этих датчиков Холла соединены со входом блока сложения и вычитания. На фиг. 1 изображена схема расположения датчиков относительно оси зонда; на фиг. 2 вариант схемы включения датчиков Холла при ттитанйи переменным током и цепь подключения; на фиг. 3 - возможные случаи расположения зонда при измерении составляющих маг нитной индукции на оси системы. Зонд содержит цилиндрический корпус 1, опорную площадку 2, блок 3 сложения и вычитания и датчики 4-6 Холла, расположенные так, что два из них 4 и 5 размещены своими плоскостями перпендикулярно оси измерительн го зонда, а датчик 6 Холла размешен между датчиками 4 и 5, при этом плоскость датчика 6 совмещена с осью зонда, а датчики 4 и 5 размещены на равных расстояниях относительно центра датчика 6, питание датчиков Холла осуществляется от одного источника тока, например, переменного (на чертеже не показан), выходные сигналы датчиков 4 и 5 Холла подаются на блок сложения и вычитания 3. Работа зонда осуществляется следующим образом. Поиск характерных точек производится с помощью двух датчиков 4 и 5 Холла, измеряющих продольную составляющую магнитной индукции на оси системы. Так как это распре деление Является функцией периодической и близкой к синусоиде, то когда датчик 6 Холла находится в максимзме распределения продоль1}ой составляющей, датчики 4 и 5 иэ,меряюг одинаковые по величине значения индук54ции (фиг. 3) и разность этих напряжений,получаемая на выходе блока сложения и ВЫчитагая равна нулю (напряжение Ui). Если датчик 6 находится в точке нуля продольной составляющей, то датчики 4 и 5 измеряют одинаковые по величине, но разные по знаку значения индукции и сумма этих напряжений равна нулю (напряжение Uj), Нулевые значения напряжений Uj и Uj соответствуют положению датчика 6 Холла в характерньгх точках. Формула изобретения Зонд для контроля магнитных периодических систем, содержаидий цилинйрический корпус, опорную площадку для установки двух датчиков Холла, плоскость одного из которых перпендикулярна оси зонда, а плоскость второго - параллельна и совмещена с осью зонда, отличающийся тем, что, с целью повыщения точности,в него введены дополнительный датчик Холла, плоскость которого перпендикулярна, оси зонда, и блок сложения и вычитания, при этом датчики Холла, плоскости которых перпендикулярны оси зонда, расположены на равных расстояниях от геометрического центра датчика Холла, плоскость которого параллельна оси зонда, а выходы этих датчиков Холла соединены со входом блока сложения и вычитания. Источники информации, принятые во внимание при экспертизе 1. Автоматическая регистрация координатных составляющих напряженности магнитного поля с осевой симметрией. Труды метрологического инститзпга СССР. Вып. 133. М-Л., 1972, с. 21. 2. Метрология, 1977, №4, 2. с. 41.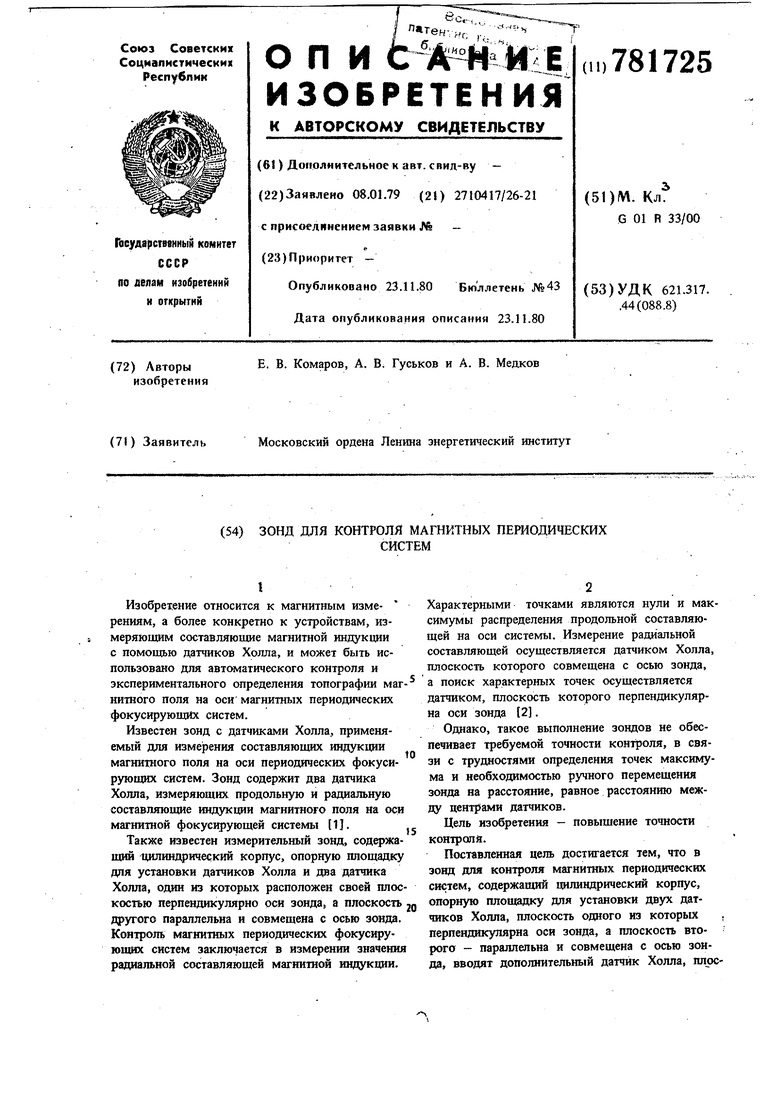
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля магнитных систем | 1980 |
|
SU960679A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОЙ ЗАПИСИ МАЛЫХ | 1972 |
|
SU323749A1 |
| ПЕРВИЧНЫЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ МАГНИТНОГО КОНТРОЛЯ НЕСУЩЕЙ АРМАТУРЫ ЛИНЕЙНО ПРОТЯЖЕННЫХ ЖЕЛЕЗОБЕТОННЫХ КОНСТРУКЦИЙ | 2020 |
|
RU2760630C1 |
| Устройство для контроля магнитных систем | 1989 |
|
SU1709259A1 |
| Автоматический компаратор | 1976 |
|
SU657375A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОПЕРЕЧНОЙ СОСТАВЛЯЮЩЕЙ МАГНИТНОЙ ИНДУКЦИИ НА ОСИ КОЛЬЦЕВЫХ МАГНИТОВ И МАГНИТНЫХ СИСТЕМ | 2021 |
|
RU2772565C1 |
| СПОСОБ ПОЛУЧЕНИЯ РАСПРЕДЕЛЕНИЯ ВЕКТОРНОЙ ФУНКЦИИ МАГНИТНОЙ ИНДУКЦИИ ПЕРИОДИЧЕСКОГО МАГНИТНОГО ПОЛЯ | 2000 |
|
RU2179323C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ | 2014 |
|
RU2568808C2 |
| Цифровой измеритель магнитной индукции | 1989 |
|
SU1712911A2 |
| МАГНИТОМЕТРИЧЕСКИЙ МОДУЛЬ ИЗМЕРИТЕЛЬНО-АНАЛИТИЧЕСКОГО КОМПЛЕКСА ДЛЯ ТЕСТИРОВАНИЯ ОТКРЫТЫХ МАГНИТНЫХ СИСТЕМ | 2006 |
|
RU2328754C2 |
и.
