Изобретение относится к неразрушающему контролю и может быть использовано для неразрушающего контроля предварительно напряженной несущей арматуры линейно протяженных железобетонных конструкций, например, предварительно напряженной арматуры, ориентированной вдоль железобетонных балок.
В процессе эксплуатации из-за коррозии скрытой под слоем бетона арматуры происходит потеря ее эффективного сечения и соответствующее уменьшение несущей способности. Для оценки технического состояния размещенных вдоль балок пучков предварительно напряженной арматуры применяется магнитный метод неразрушающего контроля. Достоверность магнитного контроля известными первичными преобразователями существенно снижается при наличии в балках и других линейно-протяженных железобетонных конструкциях поперечной арматуры (хомутов), обычно, размещенных ближе к поверхности, чем ориентированные вдоль балок пучки напряженной арматуры.
Известен первичный преобразователь для магнитного контроля несущей арматуры линейно протяженных железобетонных конструкций [Titus Michael D. Development and Field Test of Induced Magnetic Field Procedure for Nondestructive Evaluation of Deteriorated Prestressing Strand.-Submitted to the Graduate Faculty as partial fulfillment of the requirements for the Master of Science Degree in Civil Engineering.- The University of Toledo.- 2011.- p. 24-30], содержащий П-образную намагничивающую систему с электромагнитами в ее полюсах и датчики Холла для измерения магнитной индукции BI намагничивающего магнитного поля, размещенные под рабочими торцами полюсов. Датчики Холла предназначены для подключения к электронному блоку, регистрирующему изменение их сигналов, пропорциональных изменению индукции BI. При размещении намагничивающей системы над контролируемой арматурой вдоль нее величина изменения индукции BI магнитного потока, проходящего по арматуре, пропорциональна сечению соответствующего участка. Это позволяет при перемещении первичного преобразователя вдоль арматуры получить информацию о величине ее сечения по длине.
Недостаток известного преобразователя состоит в пониженной достоверности контроля арматуры в железобетонных конструкциях, например, балках, содержащих как контролируемую, предварительно напряженную продольную арматуру, так и поперечную. Это связано с тем, что величина BI определяется не только параметрами контролируемой продольной арматуры, но поперечной. Из-за этого происходит периодическое изменение регистрируемого сигнала на величину, зависящую от таких факторов, как расстояние до поперечной арматуры и ее сечение, которые не являются постоянными [Titus Michael D. Development and Field Test of Induced Magnetic Field Procedure for Nondestructive Evaluation of Deteriorated Prestressing Strand.-Submitted to the Graduate Faculty as partial fulfillment of the requirements for the Master of Science Degree in Civil Engineering.- The University of Toledo.- 2011.- p. 29, Figure 4-6.].
Известен первичный преобразователь для магнитного контроля несущей арматуры линейно протяженных железобетонных конструкций [Titus Michael D. Development and Field Test of Induced Magnetic Field Procedure for Nondestructive Evaluation of Deteriorated Prestressing Strand.-Submitted to the Graduate Faculty as partial fulfillment of the requirements for the Master of Science Degree in Civil Engineering.- The University of Toledo.- 2011.- p. 30-35], содержащий П – образную намагничивающую систему и датчики Холла для измерения тангенциальной составляющей Bτ индукции магнитных полей рассеяния. Чувствительные зоны датчиков Холла совмещены с плоскостью симметрии, равноудаленной от полюсов системы намагничивания и ортогональной соединяющему полюса магнитопроводу. При размещении намагничивающей системы над контролируемой арматурой через активную поверхность датчиков Холла проходит магнитное поле рассеяния, изменение индукции Bτ которого обратно пропорционально сечению контролируемой арматуры. Это позволяет при перемещении первичного преобразователя вдоль арматуры получить информацию об изменении величины её сечения по длине.
Однако и этот первичный преобразователь обладает пониженной достоверностью контроля арматуры в железобетонных конструкциях, например, балках, содержащих как контролируемую, предварительно напряженную продольную арматуру, так и поперечную. Это связано с тем, что величина Bτ определяется не только параметрами контролируемой продольной арматуры, но поперечной. Из-за этого происходит периодическое изменение регистрируемого сигнала на величину, зависящую от таких факторов, как расстояние до поперечной арматуры и ее сечение, которые не являются постоянными [Titus Michael D. Development and Field Test of Induced Magnetic Field Procedure for Nondestructive Evaluation of Deteriorated Prestressing Strand.-Submitted to the Graduate Faculty as partial fulfillment of the requirements for the Master of Science Degree in Civil Engineering.- The University of Toledo.- 2011.- p. 33 - 37, Figure 4-7.].
Наиболее близок к предлагаемому первичный преобразователь для магнитного контроля несущей арматуры линейно протяженных железобетонных конструкций [Fernandes B., Nims D., Devabhaktuni V. Comprehensive MMF–MFL inspection for corrosion detection and estimation in embedded prestressing strands.- J Civil Struct Health Monit (2014) N4.- pp. 43–55.], содержащий П-образную намагничивающую систему, состоящую из двух соединенных стержневым магнитопроводом разноименно намагниченных полюсов, и две группы датчиков Холла, первую группу – для регистрации индукции BI намагничивающего магнитного поля, и вторую группу – для регистрации нормальной Bn и тангенциальной Bτ составляющих индукции магнитного поля рассеяния. Датчики Холла первой группы размещены под рабочими торцами системы намагничивания, а датчики Холла второй группы – между её полюсами и симметрично относительно них. Чувствительные зоны датчиков Холла второй группы, предназначенные для регистрации Bτ, совмещены с плоскостью симметрии, равноудаленной от полюсов системы намагничивания и ортогональной соединяющему полюса магнитопроводу. Чувствительные зоны датчиков Холла второй группы, предназначенные для регистрации Bn, расположены симметрично относительно полюсов системы намагничивания, в плоскости, параллельной плоскости её рабочих торцов.
В процессе контроля одновременно регистрируются сигналы датчиков Холла, измеряющих Bn, Bτ и BI. По полученным значениям BI проводят оценку потери сечения пучков арматуры, а по значениям Bn, Bτ судят о наличии и параметрах локальных дефектов в них.
Однако и при использовании этого преобразователя достоверность контроля существенно уменьшается при наличии поперечной арматуры, обычно, имеющейся в большинстве железобетонных конструкций, в том числе, в балках мостов. Это связано с тем, что полученные сигналы зависят не только от параметров контролируемой продольной арматуры, но и от параметров и положения поперечной арматуры, обычно, имеющихся в железобетонных конструкциях, в частности, в балках мостов. Это приводит к тому, что регистрируемые с помощью известного преобразователя сигналы изменяются по сложному периодическому закону с переменным периодом, зависящем от расстояния между поперечной арматурой, и амплитудой, зависящей не только от параметров контролируемой продольной арматуры, но и от параметров и глубины залегания поперечной арматуры [Fernandes B., Nims D., Devabhaktuni V. Comprehensive MMF–MFL inspection for corrosion detection and estimation in embedded prestressing strands.- J. Civil Struct. Health Monit. – 2014.- N4.- fig. 5-9, 13, 17], которые могут изменяться по мере перемещения вдоль продольной арматуры. Таким образом, приходится судить о контролируемой арматуре по усредненным значениям сигнала, изменения которого имеют случайную составляющую.
Технический результат настоящего изобретения заключается в повышении достоверности контроля, путем подавления влияния поперечной арматуры на регистрируемый сигнал.
Указанный технический результат в заявляемом первичном преобразователе для магнитного контроля несущей арматуры линейно протяженных железобетонных конструкций, содержащем П-образную систему намагничивания, состоящую из двух соединенных стержневым магнитопроводом разноименно намагниченных полюсов, и две группы магниточувствительных элементов, чувствительные зоны магниточувствительных элементов первой группы размещены в плоскости, параллельной плоскостям рабочих торцов системы намагничивания, а чувствительные зоны магниточувствительных элементов второй группы - в плоскости, равноудаленной от полюсов системы намагничивания и перпендикулярной плоскостям ее рабочих торцов, достигается благодаря тому, что центры чувствительных зон каждого из магниточувствительных элементов первой группы смещены относительно края ближнего к ним торца системы намагничивания на величину Rx в направлении противоположного полюса, а центры чувствительных зон магниточувствительных элементов второй группы смещены на расстояние Ry от плоскости, проходящей через торцы системы намагничивания, в направлении магнитопровода.
Рекомендуется значения Rx, Ry и Rс выбирать из соотношений:
0,2Rc < Rx < 0,25 Rc,
0,07Rс < Ry < 0,09 Rc,
2Rk ≤ Rc,
где 2Rc – ширина межполюсного пространства П-образной системы намагничивания, Rk –глубина контроля.
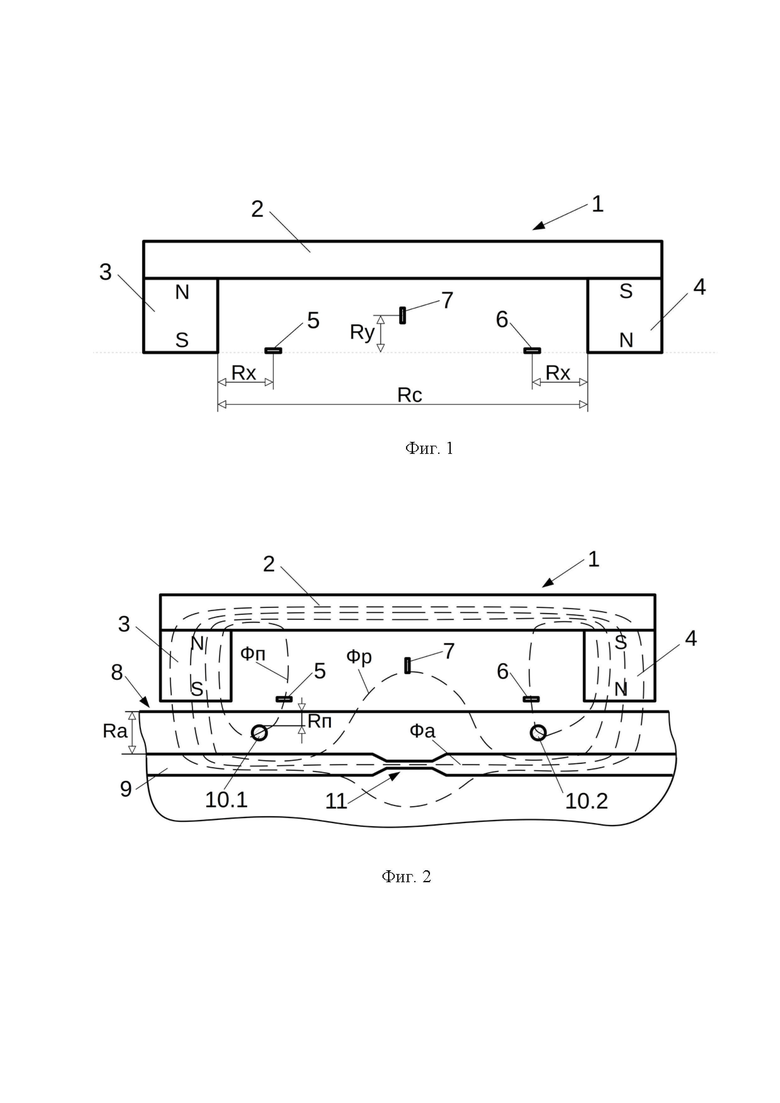
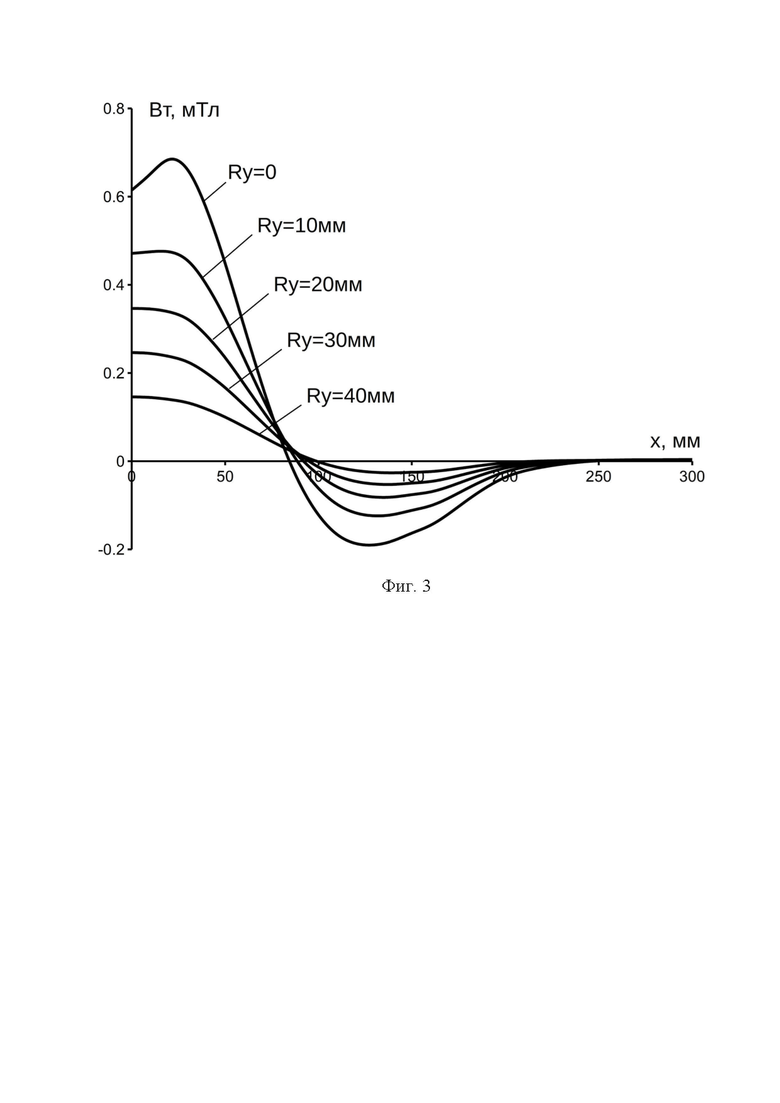
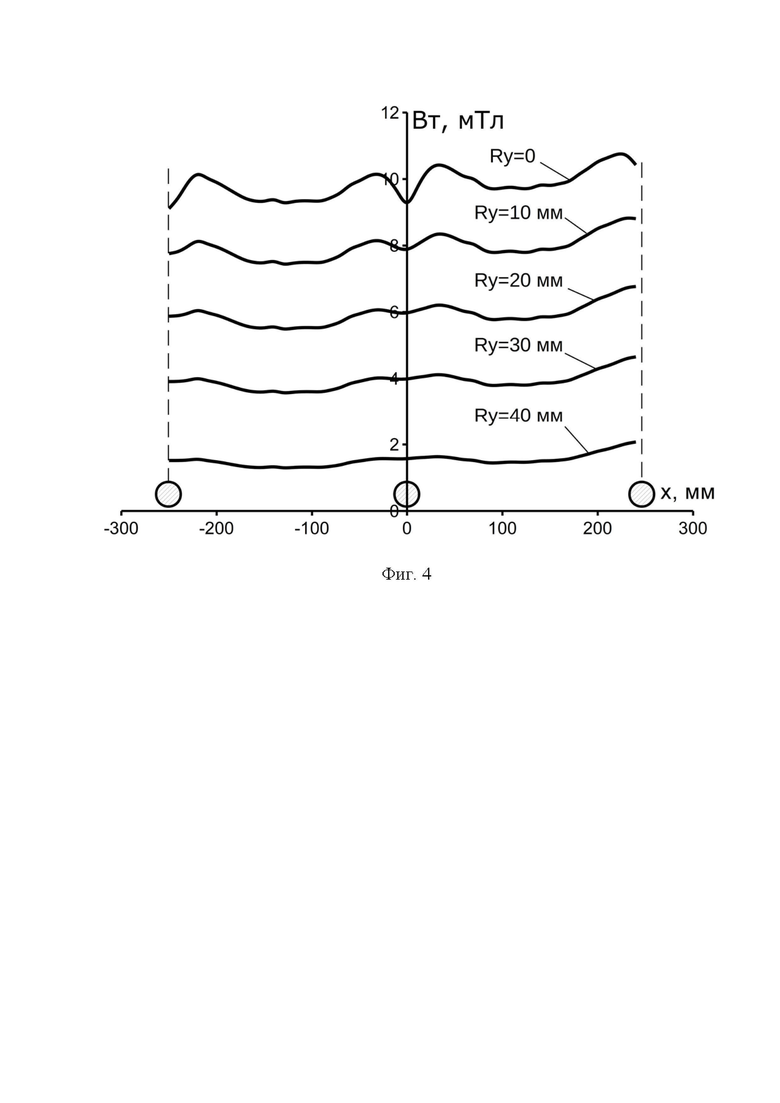
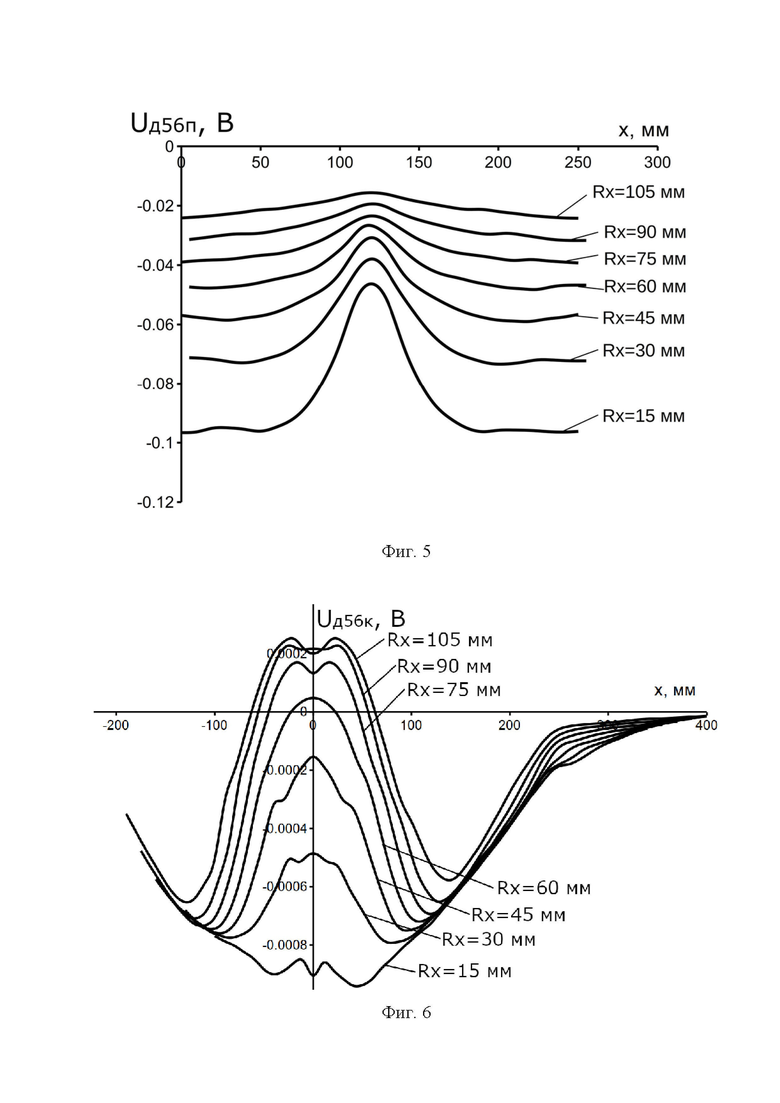
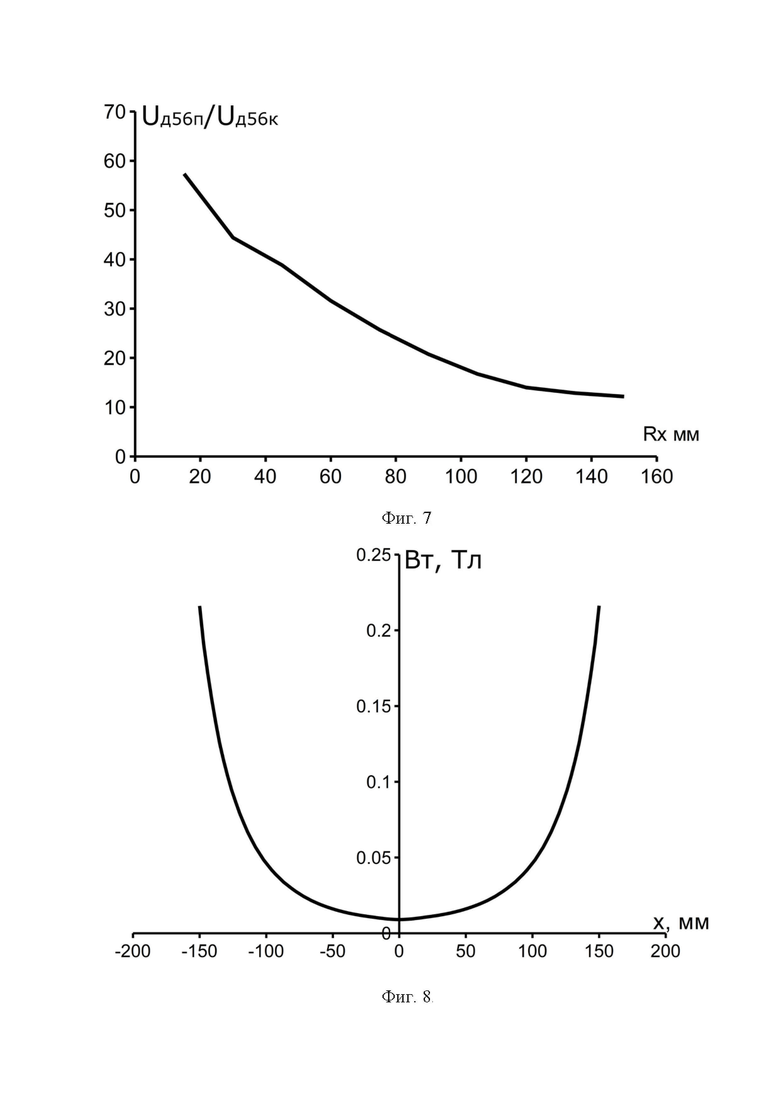
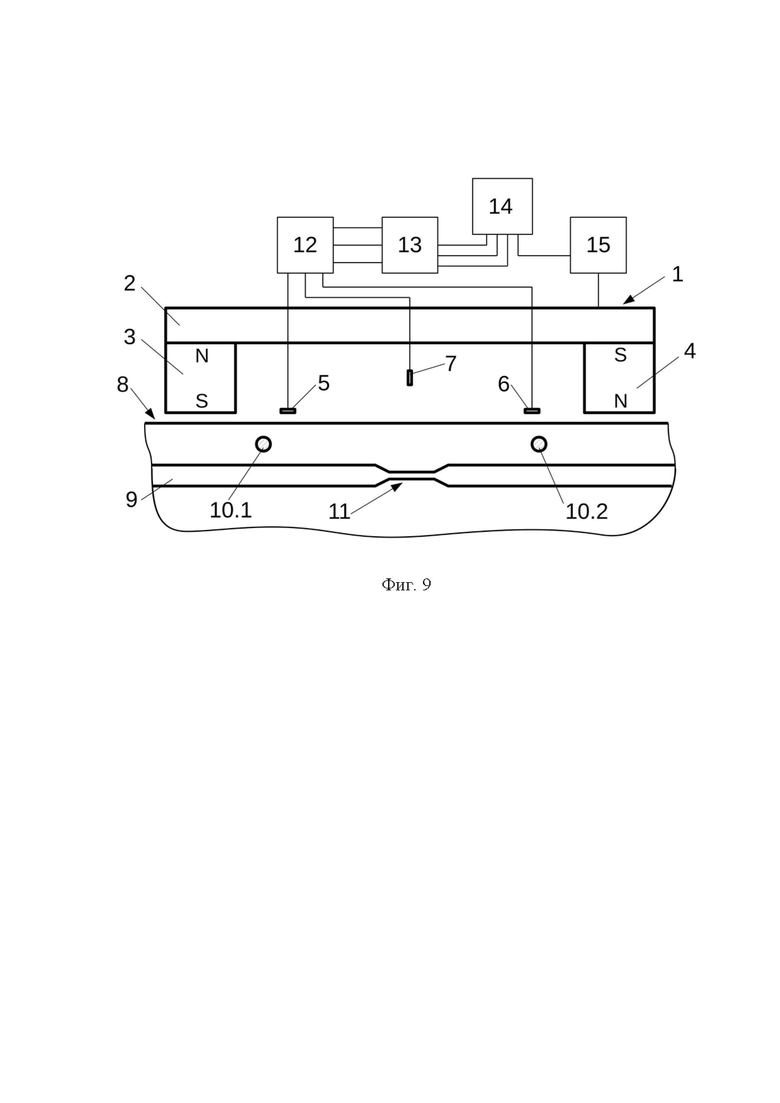
На фиг.1 схематично показан заявляемый первичный преобразователь для магнитного контроля несущей арматуры линейно протяженных железобетонных конструкций; на фиг. 2 показан заявляемый первичный преобразователь, установленный над контролируемым участком железобетонной конструкции с продольной и поперечной арматурой; на фиг. 3 приведены зависимости изменения тангенциальной составляющей Bτ(х), воздействующей на элемент второй группы, при перемещении магнитной системы вдоль продольной арматуры от центра участка с потерей сечения; на фиг. 4 показано изменение магнитной индукции Bτ(х), воздействующей на магниточувствительный элемент второй группы при перемещении магнитной системы вдоль контролируемой арматуры и наличии поперечной арматуры; на фиг. 5 показано изменение средней величины сигналов магниточувствительных элементов первой группы, возникающих в результате взаимодействия каждого из элементов с одним и тем же участком арматуры, при их перемещении вместе с системой намагничивания вдоль продольной арматуры и наличии поперечной; на фиг. 6 приведены зависимости изменения сигнала магниточувствительного элемента первой группы при его перемещении вместе с системой намагничивания вдоль контролируемой арматуры и наличии в ней участка с локальной потерей сечения; на фиг. 7 приведено отношение сигналов UД5П/UД5k магниточувствительных элементов первой группы, связанных с воздействием поперечной арматуры и локальной потери сечения в продольной арматуре; на фиг. 8 приведено распределение тангенциальной составляющей индукции Bτ магнитного поля в зоне возможного размещения магниточувствительного элемента второй группы; на фиг. 9 приведена рекомендуемая схема измерения с использованием заявляемого преобразователя.
Представленный на фиг. 1 первичный преобразователь для магнитного контроля несущей арматуры линейно протяженных железобетонных конструкций, содержит П-образную систему 1 намагничивания, состоящую из стержневого магнитопровода 2 и полюсов 3 и 4, включающих в себя постоянные магниты, имеющих на рабочих торцах разноименные магнитные полюса. Между полюсами 3 и 4 размещены магниточувствительные элементы 5 и 6, относящиеся к первой группе, и магниточувствительный элемент 7, относящийся ко второй группе. Для увеличения площади контролируемой зоны число чувствительных элементов в каждой группе может быть увеличено. При этом дополнительно элементы одной группы должны быть одинаковым образом размещены в поперечных сечениях системы 1 намагничивания. Магниточувствительные элементы рекомендуется выполнять на основе датчиков Холла. Чувствительные зоны магниточувствительных элементов 5 и 6 первой группы размещены в плоскости, параллельной плоскостям рабочих торцов системы 1 намагничивания, а чувствительная зона магниточувствительного элемента 7 второй группы - в плоскости, равноудаленной от полюсов 2 и 3 системы 1 намагничивания и перпендикулярной плоскостям ее рабочих торцов. Центры чувствительной зоны каждого из магниточувствительных элементов 5 и 6 первой группы смещены относительно края ближнего к ним торца системы 1 намагничивания на величину Rx в направлении дальнего торца, а центр чувствительной зоны магниточувствительного элемента 7 второй группы смещен на расстояние Ry от плоскости, проходящей через торцы системы 1 намагничивания, в направлении её магнитопровода 2. Значения Rc, Rx и Ry выбираются из соотношений:
0,2Rc < Rx < 0,25 Rc, (1)
0,07Rс < Ry < 0,09 Rc, (2)
2Rk ≤ Rc, (3)
где 2Rc – ширина межполюсного пространства П-образной системы намагничивания, Rk – глубина контроля.
Глубина Rk контроля в железобетонной конструкции 8 должна быть не меньше глубины Rа залегания контролируемой арматуры 9 (фиг. 2). Исходя из требуемой глубины контроля, определяется ширина Rc межполюсного пространства П-образной системы намагничивания. При изменении технического состояния арматуры 9 изменяется отношение магнитного потока Фа через арматуру 9 и магнитного потока Фр рассеяния, замыкающегося по воздуху над поверхностью железобетонной конструкции 8. При этом сумма потоков Фа, Фр и Фп, где Фп – магнитный поток, пересекающий поперечную арматуру, остается примерно постоянной. Следовательно, в случае уменьшения сечения арматуры 9 за счет коррозии, например, на дефектном участке 11, магнитный поток Фа уменьшается, что приведет к увеличению потока Фр и, соответственно, тангенциальной составляющей Bτ магнитной индукции, регистрируемой элементом 7.
С уменьшением величины Rc отношение Фа/Фр уменьшается, так как возрастает отношение магнитных сопротивлений для этих потоков. Таким образом, уменьшение Rc приводит к уменьшению чувствительности контроля и, соответственно, уменьшению глубины Rk контроля. Как показали выполненные расчетно-экспериментальные исследования, достаточная чувствительность к параметрам арматуры 9, залегающей на глубине Rа = Rk обеспечивается при выполнении условия (3).
Сигнал U7, регистрируемый элементом 7, является суммой двух составляющих
U 7 = U7k + U7п, (4)
где U7k – сигнал, определяемый техническим состоянием контролируемой арматуры 9, а U7п – влиянием поперечной арматуры 10.
Чувствительность контроля к параметрам арматуры 9 зависит от величины Ry, увеличиваясь при ее уменьшении. Характер изменения воздействующей на элемент 7 тангенциальной составляющей магнитной индукции ВТ в межполюсном пространстве системы 1 намагничивания, размещенной над арматурой 9 с дефектным участком 11, представлен на фиг. 3. Здесь приведены зависимости Bτ(х) вдоль координаты х, направленной вдоль арматуры 9 и имеющей начало в центре системы 1 намагничивания. Зависимости приведены только для х > 0, так как они симметричны относительно центра системы 1 намагничивания и Bτ(-х) = ВТ(х). Распределения Bτ(х) даны при разных значениях Ry. Под действием изменения Bτ за счет локального утонения продольной арматуры 9 формируется информативная составляющая U7k сигнала элемента 7.
Вместе с тем, при уменьшении Ry увеличивается влияние поперечной арматуры10, что приводит к росту составляющей U7п сигнала U7, регистрируемого элементом 7. На фиг. 4 показано изменение магнитной индукции, воздействующей на элемент 7 при перемещении магнитной системы 1 вдоль контролируемой арматуры 9 (по координате х) и наличии поперечной арматуры, размещенной с шагом 250 мм. Зависимости приведены при значениях Ry = 0, 10, 20, 30 и 40 мм для магнитной системы с величиной Rc = 330 мм.
Таким образом, величина Ry должна определяться из компромисса между обеспечением приемлемой чувствительности к параметрам продольной арматуры и возможно большим ослаблением влияния поперечной арматуры. Анализ совокупности полученных зависимостей показал, что величину Ry при Rc = 330 мм целесообразно выбирать в диапазоне 23 мм < Ry < 30 мм, что соответствует соотношению 0,07 Rс < Ry < 0,09 Rc. Однако и в этом случае отношение сигналов U7k/U7п = 0,8 …0,9. Для обеспечения получения информации о техническом состоянии контролируемой продольной арматуры 9 независимо от влияния арматуры 10 выполняются измерения дополнительного сигнала UД с помощью магниточувствительных элементов 5 и 6.
Сигналы UД5 и UД6, получаемые с помощью элементов 5 и 6, также имеют две составляющие
U Д5 = UД5k + UД5П и UД6 = UД6k + UД6П, (5)
где UД5k, UД6k – сигналы, связанные с влиянием контролируемой арматуры 9, а UД5П, UД6П – с влиянием поперечной арматуры 10.
Положение элементов 5 и 6 выбирается так, чтобы выполнялись соотношения UД5П >> UД5k и UД6П >> UД6k, что позволит использовать его для коррекции сигнала, регистрируемого элементом 7.
Элементы 5 и 6 работают в потоках ФП1 и ФП2, замыкающихся с торцов полюсов системы 1 намагничивания на магнитопровод 2. Потоки ФП1 и ФП2 в меньшей степени взаимодействуют с арматурой 9, так как Ra >> Rп. Очевидно, что отношение Ra/Rп максимально при размещении элементов 5 и 6 в плоскости рабочих торцов системы 1.
Расстояния Rx элементов 5 и 6 от полюсов 3 или 4, соответственно, выбираются на основе анализа зависимости сигналов от влияния поперечной арматуры 10 (UД5П, UД6П) и с учетом влияния других факторов, таких как локальное изменение поперечного сечения арматуры 9 (UД5k, UД6k), а также возможных изменений рабочего зазора между полюсами системы 1 намагничивания и арматурой 10. На фиг. 5 показано изменение средней величины UД56 сигналов UД5 и UД6, возникающих в результате взаимодействия каждого из элементов с одним и тем же участком арматуры, при их перемещении вместе с системой 1 намагничивания вдоль координаты x и наличии поперечной арматуры 10. Зависимости, приведенные для разных значений расстояния Rx, показывают, что сигнал UД56 от поперечной арматуры 10 монотонно возрастает с уменьшением Rx.
Так как сигнал UД56 должен нести информацию от поперечной арматуры 10 его изменение при наличии дефектов в контролируемой арматуре 9 нежелательно и является мешающим фактором. На фиг. 6 приведены зависимости изменения сигнала UД56 при перемещении системы 1 намагничивания вдоль координаты х и наличии участка с локальной потерей сечения в контролируемой арматуре 9. Здесь, напротив, сигнал UД56 = UД56k возрастает при увеличении Rx.
Таким образом, величина Rx определяется на основе компромисса между чувствительностью к продольной арматуре 10 и подавлением влияния арматуры 10. Это определяется отношением сигналов UД56П/ UД56k, представленным на фиг. 7. Приведенный график показывает, что отношение UД56П/UД56k монотонно растет с уменьшением Rx. Вместе с тем, с уменьшением Rx растет неоднородность тангенциальной составляющей индукции Bτ магнитного поля в зоне возможного размещения элементов 5 и 6 (фиг. 8).
Из-за этого незначительные перекосы при установке преобразователей могут приводить к существенной разнице между сигналами элементов UД5 и UД6, что недопустимо. В связи с этим целесообразно выбирать величину Rx из условия размещения элементов 5 и 6 в зонах с меньшими значениями градиента Bτ, но при достаточно высоком отношении UД5П/ UД5k. Этому условию при Rс = 330 мм соответствует выбор Rx в диапазоне 66 мм< Rx < 82,5 мм, что соответствует соотношению 0,2Rc < Rx < 0,25 Rc.
Формирование единого сигнала происходит программно, как комбинация сигналов элементов 5,6 и 7 с учетом сигнала от измерителя пути первичного преобразователя вдоль арматуры 9. Для этого может использоваться стандартная схема измерения (фиг. 9), состоящая из трехканального электронного блока 12, соединенного своими входами с элементами 5-7, аналого-цифрового преобразователя (АЦП) 13 и компьютера 14, подключенного своими входами к трем выходам АЦП 13 и выходу измерителя 15 пути.
Заявляемый первичный преобразователь для магнитного контроля предварительно напряженной арматуры линейно протяженных железобетонных конструкций по сравнению с известным обеспечивает повышение достоверности контроля путем подавления влияния поперечной арматуры на регистрируемый сигнал. Это достигается за счет размещения одной из групп магниточувствительных элементов в зоне, позволяющей получить информацию о воздействии преимущественно поперечной арматуры и использовать ее для коррекции сигнала о техническом состоянии контролируемой продольной предварительно напряженной арматуры.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МАГНИТНОЙ ДЕФЕКТОСКОПИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2634366C2 |
| Устройство выявления микромагнитных частиц в материале сварного шва сталей аустенитного класса | 2024 |
|
RU2829469C1 |
| ПЛЕНОЧНАЯ СИСТЕМА ФОРМИРОВАНИЯ МАГНИТНОГО ПОЛЯ | 2016 |
|
RU2636141C1 |
| СПОСОБ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ ПЛОЩАДИ ПОПЕРЕЧНОГО СЕЧЕНИЯ И ОБНАРУЖЕНИЯ ЛОКАЛЬНЫХ ДЕФЕКТОВ ПРОТЯЖЕННЫХ ФЕРРОМАГНИТНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2204129C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ, ПРОЙДЕННОГО ВНУТРИТРУБНЫМ СНАРЯДОМ-ДЕФЕКТОСКОПОМ С ОДОМЕТРАМИ | 2006 |
|
RU2316782C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ПОДПОВЕРХНОСТНЫХ ДЕФЕКТОВ В ФЕРРОМАГНИТНЫХ ОБЪЕКТАХ | 2010 |
|
RU2442151C2 |
| СПОСОБ БЕСКОНТАКТНОГО НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2661312C1 |
| МАГНИТОЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ | 1993 |
|
RU2131131C1 |
| СПОСОБ КОНТРОЛЯ ПЛОЩАДИ ПОПЕРЕЧНОГО МЕТАЛЛИЧЕСКОГО СЕЧЕНИЯ СТАЛЬНОГО КАНАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2293313C1 |
| Способ скоростной магнитной дефектоскопии длинномерных изделий | 2019 |
|
RU2707977C1 |
Изобретение относится к неразрушающему контролю. Первичный преобразователь для магнитного контроля несущей арматуры линейно протяженных железобетонных конструкций содержит П-образную систему намагничивания, при этом центры чувствительной зоны каждого из магниточувствительных элементов первой группы смещены относительно края ближнего к ним торца системы намагничивания на величину Rx в направлении дальнего торца, а центры активной площадки магниточувствительных элементов второй группы смещены на расстояние Ry от плоскости, проходящей через торцы системы намагничивания, в направлении её магнитопровода. Технический результат - повышение достоверности контроля арматуры в железобетонных конструкциях. 1 з.п. ф-лы, 9 ил.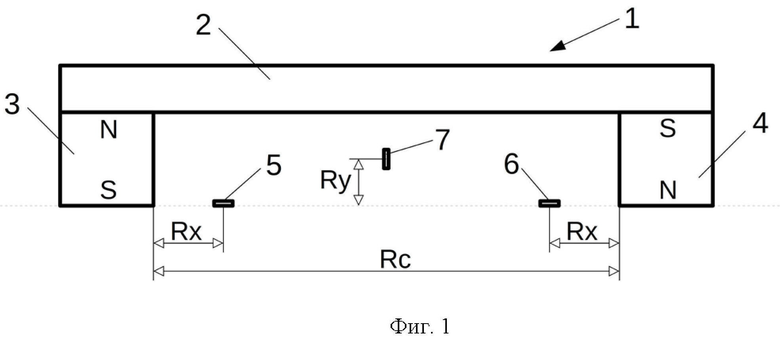
1. Первичный преобразователь для магнитного контроля несущей арматуры линейно протяженных железобетонных конструкций, содержащий П-образную систему намагничивания, состоящую из двух соединенных стержневым магнитопроводом разноименно намагниченных полюсов, и две группы магниточувствительных элементов, чувствительные зоны магниточувствительных элементов первой группы размещены в плоскости, параллельной плоскостям рабочих торцов системы намагничивания, а чувствительные зоны магниточувствительных элементов второй группы - в плоскости, равноудаленной от полюсов системы намагничивания и перпендикулярной плоскостям ее рабочих торцов, отличающийся тем, что центры чувствительной зоны каждого из магниточувствительных элементов первой группы смещены относительно края ближнего к ним торца системы намагничивания на величину Rx в направлении дальнего торца, а центры активной площадки магниточувствительных элементов второй группы смещены на расстояние Ry от плоскости, проходящей через торцы системы намагничивания, в направлении её магнитопровода.
2. Первичный преобразователь для магнитного контроля несущей арматуры линейно протяженных железобетонных конструкций по п.1, отличающийся тем, что значения Rc, Rx и Ry выбираются из соотношений:
0,2Rc < Rx < 0,25 Rc,
0,07Rс < Ry < 0,09Rc,
2Rk ≤ Rc,
где 2Rc – ширина межполюсного пространства П-образной системы намагничивания, Rk – глубина контроля.
| Fernandes B., Nims D., Devabhaktuni V | |||
| "Comprehensive MMF-MFL inspection for corrosion detection and estimation in embedded prestressing strands" | |||
| J Civil Struct Health Monit, 2013 | |||
| СПОСОБ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ ПЛОЩАДИ ПОПЕРЕЧНОГО СЕЧЕНИЯ И ОБНАРУЖЕНИЯ ЛОКАЛЬНЫХ ДЕФЕКТОВ ПРОТЯЖЕННЫХ ФЕРРОМАГНИТНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2204129C2 |
| ДИНАМОМЕТР ДЛЯ ОПРЕДЕЛЕНИЯ МУСКУЛЬНОЙ СИЛЫ РУКИ (СИЛОМЕР) | 1928 |
|
SU17807A1 |
| CN 109374726 A, 22.02.2019. | |||

