Изобретение относится к средствам измерения характеристик постоянного магнитного поля в рабочей области магнитных систем промышленного и научно-исследовательского назначения в случаях, когда характерные размеры такой области составляют величину от нескольких десятков сантиметров до нескольких метров, а необходимый шаг пространственной дискретизации измерений параметров магнитного поля имеет значения от нескольких десятых долей до единиц миллиметров. Наибольшая потребность в проведении детализированного мониторинга пространственного распределения таких параметров магнитного поля, как направление и модуль вектора напряженности Н (вектора магнитной индукции В) магнитного поля и вычисляемых на основе таких измерений силовых характеристик магнитного поля, возникает при испытаниях различного рода магнитных сепараторов и железоотделителей. Сложность проведения таких измерений заключается в том, что в достаточно большом объеме рабочего пространства магнитной системы (до 0,3 м3) необходимо провести большое количество замеров с достаточно высокой точностью фиксации относительных перемещений магнитометрических датчиков.
Применяемый в настоящее время дискретно-выборочный способ измерения параметров магнитного поля, с ручным позиционированием магнитометрического зонда отличается большой трудоемкостью и низкой точностью. Оценка магнитных систем сепараторов и железоотделителей производится по одному параметру - значению модуля вектора индукции магнитного поля В в отдельных (реперных) точках рабочего пространства.
Однако объективная оценка эффективности магнитной системы и ее технологических характеристик невозможна без учета силового параметра, определяющего извлекающую и удерживающую способность системы. Как известно, сила воздействия поля магнитной системы на сепарируемые магнитовосприимчивые частицы в большинстве практически важных случаев пропорциональна произведению H·gradH, где Н - модуль вектора напряженности магнитного поля Н, связанного с вектором магнитной индукции в воздушной среде соотношением В=μ0Н, где μ0 - магнитная проницаемость вакуума (при этом система с меньшей напряженностью, но большим значением градиента, в ряде случаев может иметь лучшие силовые характеристики, чем система с большей напряженностью). Таким образом, для объективной оценки магнитной системы необходимо иметь детализированную топографическую картину магнитного поля с данными по замеру напряженности (индукции) магнитного поля в таком количестве точек, которого будет достаточно для определения значений градиента этих величин в исследуемой области.
Парк приборов, являющихся средствами контроля (измерения) параметров магнитных систем, ограничивается в настоящее время гауссметрами (тесламетрами) общего назначения, имеющими зонд ручного позиционирования с датчиком Холла. Технические и программные средства для комплексного тестирования открыто-градиентных магнитных систем сепараторов и железоотделителей, с получением трехмерной картины (топографии) поля, в том числе и по силовому параметру (H·gradH), отсутствуют.
Известно из SU 321969, 19.11.1971, например, устройство для измерения магнитного поля в ускорителях заряженных частиц, которое состоит из магнитомодуляционных датчиков; датчики этого типа представляют собой пермаллоевый зонд, у которого для съема сигнала и создания поля имеются сигнальная и компенсирующая обмотки, возбуждение датчика осуществляют с помощью компенсирующей обмотки. С помощью этих датчиков суммируют сигналы четных гармоник и токи подмагничивания, компенсируют суммарный сигнал гармоник с датчиков до нуля в заданный момент времени изменением суммарного тока
Из SU 953608, 23.08.1981 известен малогабаритный высокочуствительный магнитометр для измерения величины и знака напряженности магнитных полей малой интенсивности. Известный магнитометр содержить генератор, дифференциальный феррозонд, фильтр, делитель частоты на два, Д-триггер. Однако известный магнитометр сложен в изготовлении и настройке имеет все же большие габариты и, кроме того, также не обеспечивает проведение многофункционального тестирования магнитных систем.
Из RU 2261456, 27.09.2005 известно устройство для определения параметров, характеризующих намагниченность объекта, включающее трехкомпонентный датчик, три усилительно-преобразовательных блока, генератор переменных напряжений, регистрирующий блок, углоизмерительное устройство, устройство обработки информации. С помощью данного устройства проводят измерение в выбранной опорной системе координат проекций вектора магнитной индукции внешнего магнитного поля и проекций результирующего вектора индукции магнитного поля объекта и внешнего магнитного поля в разных точках пространства и по измеренным проекциям векторов магнитной индукции в первой и во второй точках пространства определяют параметры, характеризующие намагниченность объекта с по определенной системе уравнений. Устройство достаточно сложно в исполнении, процесс измерения длителен и не позволяет осуществить полное тестирование магнитных систем.
Из SU 900228, 23.01.1982 известно устройство для измерения магнитных полей, например, при диагностике, разведке полезных ископаемых, содержащее датчик Холла, источник питания, измерительный усилитель, блок сравнения, трансформаторы. Через участки датчиков, заключенные между каждым из токовых эдектродов и смежными с ним холловскими электродами, пропускают вспомогательный ток и сравнивают между собой напряжения между каждым из холловских электродов и смежными с ними токовыми электродами. Данный способ также не обеспечивает полное тестирование магнитных систем.
Из RU 2232399, 10.07.2004 известен магнитомеханический тесламер, содержащий три идентичных магнитомеханических преобразователя, установленных на общем основании, оси чувствительности которых взаимно перпендикулярны, при этом на том же основании установлен еще один идентичный преобразователь, который расположен таким образом, что оси чувствительности двух из четырех преобразователей взаимно перпендикулярны, а оси поворота параллельны, и еще двух преобоазователей, оси чувствительности которых параллельны, а их оси поворота перпендикулярны. Основной областью применения таких тесламетров являются:
- обеспечение службы непрерывных измерений вариаций магнитного поля Земли в условиях стационарных геомагнитных обсерваторий;
- обеспечение наземных (и морских) магнитотеллургических методов исследований глубинного строения Земли;
- измерение магнитных свойств слабомагнитных веществ, материалов и горных пород;
- проведение магнитовариационных дифференциальных измерений для разделения магнитных аномалий на рудные и безрудные;
- индикация сверхслабых полей при аттестации мер магнитной индукции и др.
С помощью такого тесламетра по измеренным значениям составляющей вектора индукции В, вектора магнитного момента, чувствительности устройства к магнитной индукции поля вычисляют модуль вектора индукции В и его составляющие, магнитное склонение и наклонение в любой геомагнитной системе координат и угол рассогласования систем координат в горизонтальной плоскости. Однако и данный тесламетр не обеспечивает возможности осуществления полного многофункционального тестирования магнитных систем и, в частности, магнитных систем открыто-градиентных сепараторов и железоотделителей
Тестирование магнитных систем сепараторов и железоотделителй необходимо осуществлять на всех стадиях жизненного цикла этого оборудования и, учитывая тот факт, что число сепараторов только на одном горно-обогатительном комбинате с магнитной системой обогащения минерального сырья может достигать несколько сотен с суммарной производительностью в десятки тысяч тонн в час, недостаточно точное и оперативное их тестирование может привести к весьма значительным технологическим и экономическим потерям.
Таким образом, применяемые в настоящее время дискретные способы измерения параметров магнитного поля с устаревшим инструментальным функционально-методическим оформлением и ручным позиционированием зонда с датчиком Холла отличаются большой трудоемкостью и низкой точностью. Оценка магнитных систем сепараторов и железоотделителей производится по одному параметру- значению модуля вектора индукции магнитного поля В в отдельных точках рабочего пространства.
Технической задачей данного изобретения является обеспечение возможности оперативного сбора большого массива данных по измерению величин отдельных компонент вектора магнитной индукции в любой части рабочей области открытой магнитной системы и, в частности, например, в любом объеме между поверхностью барабана магнитного сепаратора и границей той области, которую в процессе сепарации занимает сырье, при заданной точности измерения как параметров магнитного поля, так и изменения координат магнитометрических датчиков.
Техническая задача достигается тем, что магнитометрический модуль измерительно-аналитического комплекса для тестирования открытых магнитных систем (в частности, магнитных систем открыто-градиентных сепараторов и железоотделителей), включающий в себя по меньшей мере одну одномерную или двумерную матричную систему магнитометрических датчиков (например, датчиков Холла, магниторезистивных или других магниточувствительных датчиков), закрепленных в обойме, которая установлена на подвижной каретке, предназначенной для перемещения и позиционирования датчиков над плоской или цилиндрической поверхностью магнитной системы в пределах выбранной зоны тестирования, и электронно-коммутирующий блок, сопряженный с блоком обработки и сохранения информации.
При этом магнитометрический модуль измерительно-аналитического комплекса для тестирования открытых магнитных систем включает в себя одномерную (горизонтальную или вертикальную) матричную систему магнитометрических датчиков, закрепленную на подвижной каретке, которую перемещают по плоской или цилиндрической поверхности магнитной системы в пределах выбранной зоны тестирования, определяемой протяженностью и положением двух направляющих, по которым движется каретка.
При этом магнитометрический модуль измерительно-аналитического комплекса для тестирования открытых магнитных систем включает в себя двумерную матричную систему магнитометрических датчиков, закрепленную на подвижной каретке, которую перемещают по плоской или цилиндрической поверхности магнитной системы в пределах выбранной зоны тестирования, определяемой размерами и положением двух направляющих, по которым движется каретка.
Заявленный магнитометрический модуль измерительно-аналитического комплекса для тестирования открытых магнитных систем содержит матричную систему, которую непрерывно или дискретно перемещают в направлении, перпендикулярном направлению движения каретки и линии расположения магнитометрических датчиков, например, удаляясь от магнитной системы так, чтобы все датчики одномерной горизонтальной матричной системы или датчики нижнего ряда двумерной матричной системы оставались равноудаленными от поверхности магнитной системы.
Данный магнитометрический модуль измерительно-аналитического комплекса для тестирования открытых магнитных систем включает матричную систему, которую дискретно перемещают по направлению, вдоль которого расположены датчики, на расстояние, равное mL/n, где L - шаг расположения датчиков на одной линии, m и n - целые числа (m<n), при этом величина L/n определяет желаемый шаг дискретизации топографической картины магнитного поля.
Магнитометрический модуль измерительно-аналитического комплекса для тестирования открытых магнитных систем по изобретению содержит каретку, на которой закреплена обойма с матричной системой, которую перемещают без проскальзывания на роликах в виде зубчатых колес по направляющим, покрытым зубчатой или перфорированной лентой, таким образом, что угол поворота роликов однозначно определяет расстояние, пройденное кареткой вдоль направляющих.
Координаты магнитометрических датчиков в момент считывания информации однозначно определяют по их положению в матричной системе, углу поворота роликов каретки и величине перемещения системы вдоль и перпендикулярно линии расположения датчиков.
При этом магнитометрические датчики, размещенные в узлах матричной системы, ориентированы таким образом, что они измеряют только нормальную или одну из двух тангенциальных компонент вектора магнитной индукции.
Магнитометрический модуль может включать в себя три матричные системы с разной ориентацией магнитометрических датчиков, дискретное смещение которых позволяет обеспечить поэтапное перемещение узлов разных матричных систем в одни и те же точки рабочего пространства для получения набора всех трех компонент вектора магнитной индукции в выбранных точках пространства.
Итак, предлагаемый магнитометрический модуль предназначен для использования в составе измерительно-аналитического комплекса для определения векторных характеристик постоянного магнитного поля открытых магнитных систем (в частности, магнитных систем открыто-градиентных сепараторов и железоотделителей). Он включает в себя матричную систему магнитометрических датчиков (например, датчиков Холла, магниторезистивных или магниточувствительных датчиков другого типа), устройство для ее перемещения и позиционирования, электронные элементы для сопряжения с блоком обработки и сохранения информации (в частности, многоканальный электронный коммутатор). Заявленный измерительно-аналитический комплекс, включающий матричную систему датчиков, например датчиков Холла, блок для ее перемещения и позиционирования, электронно-измерительный блок, блок обработки информации с пакетом специальных программ, позволяет получить детальную информацию об изменении нормальных и тангенциальных составляющих вектора индукции магнитного поля с визуализацией на мониторе пространственных зависимостей не только индукции B=f(X,Y,Z), но и силовых характеристик (силового фактора H.gradH=g(X,Y,Z), определяемых значениями магнитной индукции поля и ее градиента в исследуемых точках. При этом имеется возможность учета физических характеристик различных фракций перерабатываемого сырья и расчета параметров, определяющих эффективность процесса сепарации при различных технологических условиях, что в конечном счете позволяет вырабатывать рекомендации по совершенствованию технологического процесса с учетом реальной картины магнитного поля системы.
На фиг.1 показано, что матричная система (1), содержащая магнитометрические датчики (2), закреплена на подвижной каретке (3), которую перемещают по плоской или цилиндрической поверхности (4) магнитной системы в пределах выбранной зоны тестирования, определяемой протяженностью и положением двух направляющих (5), по которым движется каретка. Направляющие (5) закрепляются на тестируемом участке магнитного барабана с помощью съемных держателей.
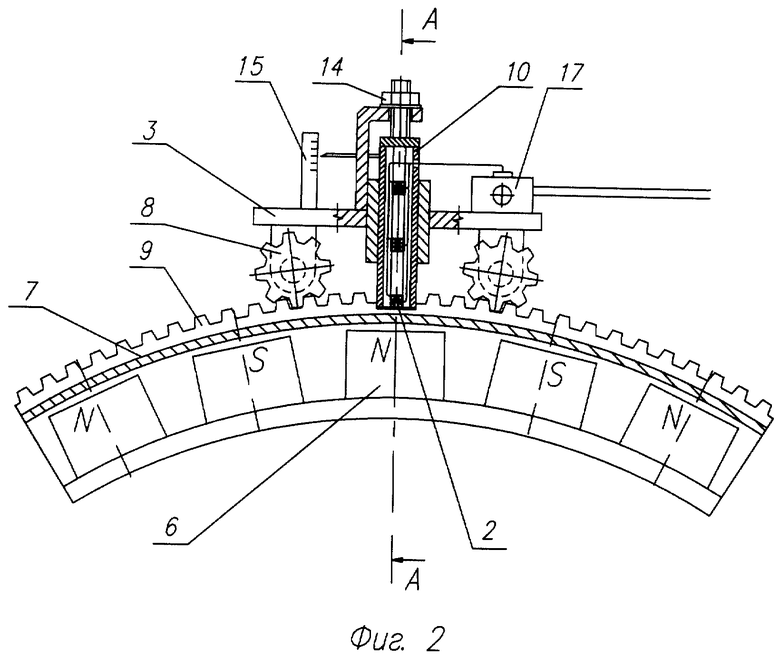
На фиг.2 представлен эскиз магнитометрического модуля, перемещаемого над магнитной системой (6), находящейся под цилиндрической обечайкой барабана (7). Подвижную каретку (3) перемещают на зубчатых роликах (8) по направляющим, покрытым зубчатой лентой (9). Обойму (10) с матрицей магнитометрических датчиков(2) устанавливают в каретке по нормали к поверхности магнитной системы.
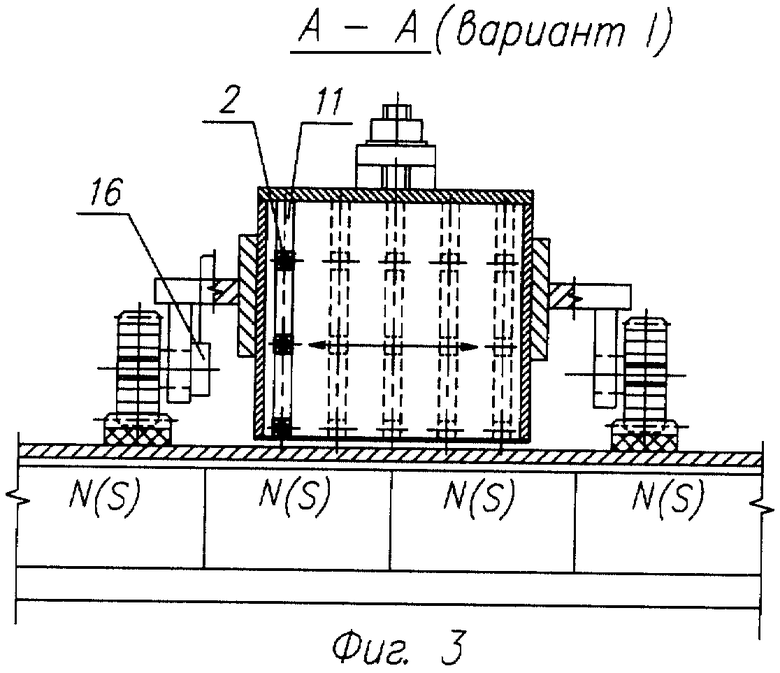
Матрица с магнитометрическими датчиками может быть одномерной и устанавливаться в обойме вертикально, как это показано на позиции (11) фиг.3. В этом случае для получения наиболее полного массива данных по измерению магнитной индукции в исследуемом рабочем пространстве при заданном положении направляющих матрицу перемещают между вертикальными стойками обоймы в горизонтальном направлении.
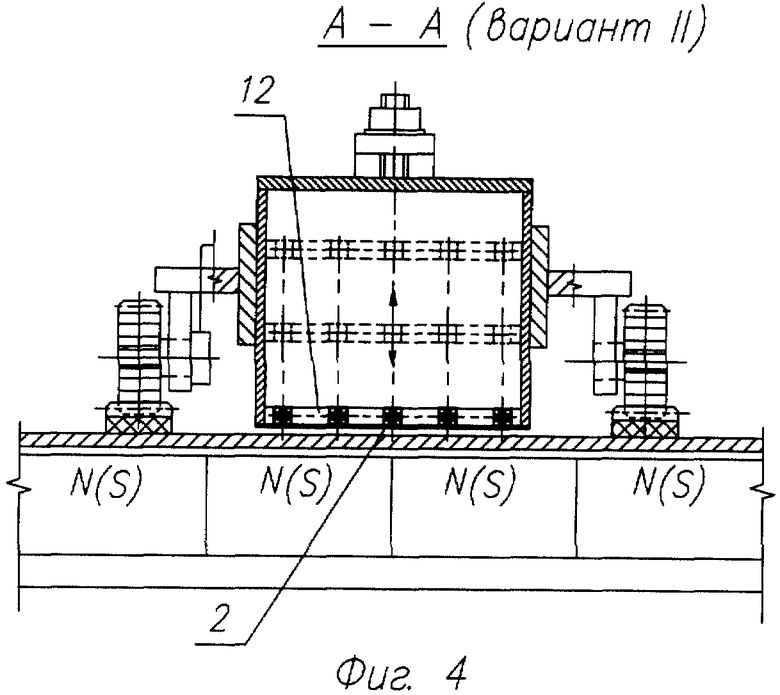
Матрица с магнитометрическими датчиками может быть одномерной и устанавливаться в обойме горизонтально, как это показано на позиции (12) фиг.4. В этом случае для получения наиболее полного массива данных по измерению магнитной индукции в исследуемом рабочем пространстве при заданном положении направляющих матрицу перемещают в пределах рамки обоймы в вертикальном направлении. Выбор между двумя вышеупомянутыми вариантами ориентации матрицы зависит от структуры магнитного поля тестируемой системы.
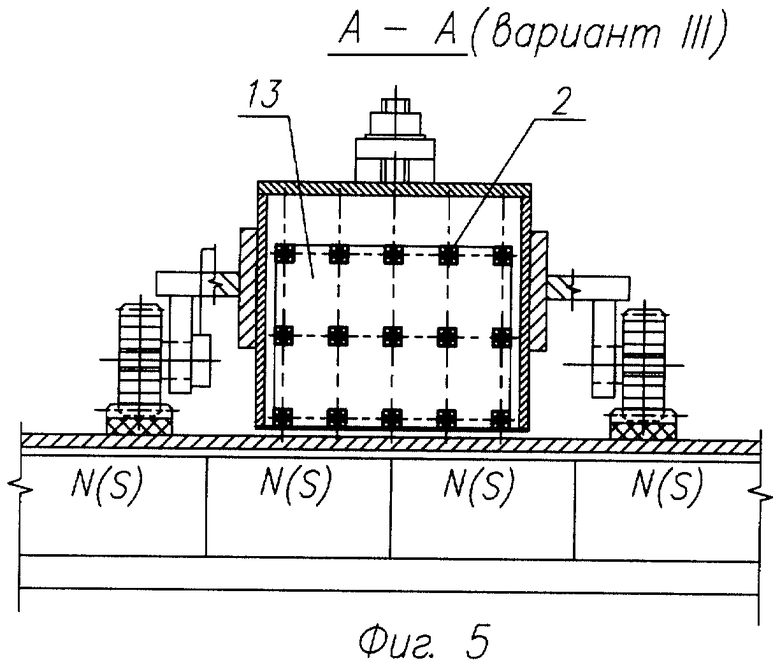
В том случае, когда наиболее важным требованием, предъявляемым к измерительному комплексу, является высокая скорость сбора данных, используют двумерную матрицу магнитометрических датчиков, изображенную на позиции (13) фиг.5.
На позиции (14) фиг.2 изображена регулировочная гайка, с помощью которой сводят до минимума зазор между поверхностью магнитной системы и нижними магнитометрическими датчиками, установленными в обойме (10). Перемещение обоймы по вертикали контролируют с помощью шкалы (15). Величину перемещения всего модуля вдоль направляющих определяют по углу поворота зубчатого ролика, который измеряют с помощью датчика угла поворота ролика (16).
Перемещение матричной системы вдоль направлений AD и АА′, обозначенных на фиг.1, может осуществляться непрерывно, и шаг пространственной сетки, на которой производится замер параметров магнитного поля вдоль этих направлений, может быть произвольным. В то же время минимальный шаг этой сетки вдоль направления АВ равен расстоянию между соседними магнитометрическими датчиками. Для снятия этого ограничения матричную систему дискретно перемещают по направлению, вдоль которого расположены датчики, на расстояние mL/n, где L - шаг расположения датчиков на одной линии, m и n - целые числа (m<n), при этом величина L/n определяет желаемый шаг дискретизации топографической картины магнитного поля вдоль данного направления.
Каждая из вышеперечисленных матричных систем состоит из однотипных магнитометрических датчиков с одинаковой пространственной ориентацией, обеспечивающей измерение или нормальной, или одной из двух тангенциальных компонент вектора магнитной индукции. Для обеспечения возможности одновременного измерения всех трех компонент вектора магнитной индукции в одной обойме размещают три скрепленные между собой геометрически идентичные матричные системы с различной ориентацией датчиков. При этом датчики различных матричных систем, расположенные в примыкающих к друг другу узлах, имеют две одинаковые координаты и несовпадающие третьи координаты, отличающиеся на величину Δ, равную смещению одной матричной системы по отношению к другой. Перемещая магнитометрический модуль вдоль направляющих на величину Δ, добиваются поэтапного перемещения узлов разных матричных систем в одни и те же точки рабочего пространства и получают набор всех трех компонент вектора магнитной индукции в выбранных точках пространства.
Предварительная обработка сигнала производится в электронно-коммутирующем блоке (17), в состав которого входят стабилизированный источник питания, усилитель сигнала, блок формирования опорных импульсов, многоканальный электронный коммутатор и аналого-цифровой преобразователь. Выходной сигнал с магнитометрических датчиков после предварительного усиления подают на вход многоканального электронного коммутатора, блок управления которым связан с датчиком угла поворота ролика и блоком формирования опорных импульсов. С выхода электронно-коммутирующего блока сигнал поступает на блок сохранения и обработки информации, включающий в себя персональный компьютер с соответствующим программным обеспечением.
Таким образом применение комплекса позволит автоматизировать процесс измерений, повысить точность и информативную ценность получаемых данных, даст возможность распечатывать протоколы замеров и создавать электронный архив рабочих параметров систем.
Изобретение относится к средствам измерения характеристик постоянного магнитного поля открытых магнитных систем. Может применяться в машиностроении при изготовлении магнитных сепараторов, железоотделителей и другого оборудования, имеющего магнитные системы открытого типа, при эксплуатации такого оборудования в перерабатывающих и других отраслях промышленности, а также в исследовательских целях. Модуль включает в себя матричную систему магнитометрических датчиков, закрепленных в обойме, которая установлена на подвижной каретке, предназначенной для перемещения и позиционирования датчиков над плоской или цилиндрической поверхностью магнитной системы в пределах выбранной зоны тестирования, и электронно-коммутирующий блок, сопряженный с блоком обработки и сохранения информации. При тестировании магнитной системы модуль перемещается по определенному участку цилиндрической или плоской поверхности магнитной системы, производя замеры векторных параметров магнитного поля одновременно в нескольких точках пространства над магнитной системой. Получаемая при этом информация позволяет оперативно составлять топографическую картину магнитного поля и вычислять его силовые характеристики. 8 з.п. ф-лы, 5 ил.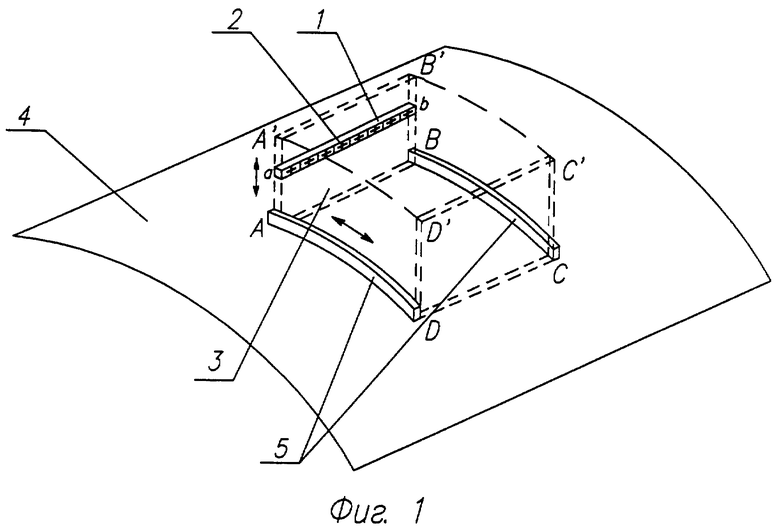
| МАГНИТОМЕХАНИЧЕСКИЙ ТЕСЛАМЕТР | 2002 |
|
RU2232399C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ, ХАРАКТЕРИЗУЮЩИХ НАМАГНИЧЕННОСТЬ ОБЪЕКТА, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2261456C1 |
| СПОСОБ БЕСКОНТАКТНОГО ВЫЯВЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ХАРАКТЕРА ДЕФЕКТОВ МЕТАЛЛИЧЕСКИХ СООРУЖЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2264617C2 |
| US 3873914 A, 25.03.1975 | |||
| СТРУННАЯ ТРАНСПОРТНАЯ СИСТЕМА ЮНИЦКОГО | 2006 |
|
RU2324612C1 |

