Изобретение относится к магнитным измерениям, а более конкретно -к устройствам, измеряющим составляющие магнитной индукции с помощью датчиков Холла, и может быть использовано для автоматического контрбля поперечных составляющих магнитного поля осесимметричных фокусирующих систем и соленоидов.
Целью изобретения является повышение точности и обеспечение автоматизации процесса измерения.
Цель достигается тем, что в устройство, содержащее зонд с датчиком Холла, блок вращения зонда, блок перемещения зонда, усилитель, источник питания датчика Холла, который подключен к входу датчика Холла, а выход последовательно соединен с входом усилителя, введены кодовый датчик углового положения зонда, блок сопряжения, формирователь сигналов датчика, блок управления и последовательно соединенные устройство выборки и хранения, аналоговый вычислительный блок и блок индикации, при этом выход кодового датчика углового положения зонда через формирователь сигналов датчика соединен с входом блока управления и управляющими входа-. ми блока выборки и хранения, к аналоговому входу которого подключен выход усилителя, два выхода блока управления подключены через блок сопряжения к входам блока вращения зонда и блока перемещения зонда, а третий подсоединен к блоку индикации, датчик Холла в зонде установлен на оси зонда.
На чертеже показано предлагаемое устройство.
Устройство содержит блок 1 перемещения зонда, блок 2 вращения зонда, кодовый датчик 3 углового положения, зонд 4, датчик Холла 5, блок 6 сопряжения, формирователь 7 сигналов датчика, усилитель 8, источник 9 питания датчика Холла, блок 10 управления, блок 11 выборки и хранения, аналоговый вычислительный блок 12, блок 13 индикации.
Блок 1 перемещения зонда и блок 2 вращения зонда соединены через блок б сопряжения с соответствующими выходами блока 10 управлений и служат для продольного перемещения зонда и его вращения. Блок 1 перемещения зонда состоит из схемы привода и электродвигателя, к оси которого прикреплен ходовый винт. Ходовый винт перемещает каретку с блоком 2 вращения зонда. Плата привода управляется логическими сигналами, формируемыми блоком 6 сопряжения. Блок 2 вращения зонда состоит из схемы привода электродвигателя, на оси которого установлены кодовый датчик 3 углового положения и зонд 4 с датчиком Холла 5. Управление двигателем вращения зонда осуществляется логическими сигналами, формируемыми в блоке 6 сопряжения из команд блока 10 управления. Кодовый датчик 3 углового положения зонда соединен через формирователь 7 сигналов датчика с управляющим входом блока 11 выборки и хранения и входом блока 10 управления и служит для определения момента выборки сигнала от датчика Холла 5. Кодовый датчик 3 углового положения зонда может быть выполнен следующим обра:юм: на оси электродвигателя устройства вращения зонда устанавливается диск с нанесенными отверстиями, радиальное положение которых соответствует двоичному коду, я количество по окружности определяется требуемым числом выборок информации с
0 магнитной индукции, поступающей от датчика Холла 5. Дополнительно размещены отверстия для формирования синхроимпульсов. Информация об угловом положении зонда снимается с фотоприемник.т от
5 оптопар. расположенных неподвижно и симметрично относительно плоскости диска. Датчик Холла 5 устанавливается в зонде 4 в непосредственной близости от оси зонда и параллельно ей. Выводы датчика Холпа 5
0 подсоединены к источнику 9 питания и к усилителю 8. Индикация осуществляется при подаче сигнала от устройства 10 упоавления.
Устройство работает следующим обра5 зом.
Предварительно в блоке 10 управления задается шаг измерения, т.е. минимальное расстояние от оси исследуемой фокусирующей системы, через которое необходимо измерять поперечную составляюи;ую магнитного поля и предел измерения максимальную величину исследуемого участка. Шаг и расстояние устанавливают с помощью кнопок в блоке индикации и по значениям цифровых индикаторов. Далее осуществляется команда Пуск соответствующей кнопкой на плате индикации и Г)лок управления вырабатывает сигналы для автоматического управления измерением поперечной составляющей магнитного поля исследуемой фокусирующей системы. При этом от блока 10 управления подается сигнал на блок 6 сопряжения, в котором осуществляется коммутация питающего
5 напряжения для двигателей блока 1 перемещения зонда. Перемещение осуществляется на величину заданного шага. Далее от блока 10 управления подается сигнал на блок 6 сопряжения для коммутации питающего напряжения на двигатель блока 2 эращения зонда. Зонд вращается вместе с кодовым датчиком 3 углового положения, сигналы от которого через формирователь 7 сигналов датчика подаются на управляющие входы блока 11 выборки и хранения, на вход которого поступает через усилитель аналоговый сигнал от датчика Холла 5. На выходе блока 11 выборки и хранения формируется восемь сигналов В/ох и восемь сигналов В/Зц - коэффициентов Фурье. соответствующих в еличине сигнала от датчика Холла в каждый из восьми положений кодового датчика 3 углового положения. Эти сигналы запоминаются на время полного вращения зонда 4. Полученные сигналы подаются на аналоговый вычислительный блок 12. в котором производится вычисление и , . После полного вращения датчика углового положения зонда, что контролируется блоком 10 управления, и, следовательно. формирования всех текущих значений В/Эд . от блока 10 управления поступает сигнал разрешения индикации полученных значений Во и В/ . На этом заканчивается один полный цикл измерения первых гармонических проекций поперечной составляющей магнитного поля в одной точке фокусирующей системы. Далее сигналом от блока управления зонд перемещается на следующий шаг и цикл повторяется. Количество шагов равно отношению заданной величины предела перемещения зонда к величине шага. Для каждой точки определяется модуль и угловое направление модуля первой гармоники поперечной составляющей магнитного поля: Л/Оо Во Вру, + e arc,g| Сигналы на входе аналогового вычислительного блока появляются по мере вращения зонда. Поэтому истинная вычисленная информация появляется на выходе аналогового вычислительного устройства только после полного вращения зонда. Поэтому на блок 13 индикации подается сигнал разрешения после полного вращения зонда с учетом времени прохождения аналоговых сигналов через блок выборки и хранения и аналоговый вычислительный блок. После прохождения всего установленного значения исследуемого участка зонд перемещается в начальное положение сигналом от устройства управления. Фор м у ла изобретения Устройство для контроля магнитных систем, содержащее зонд с датчиком Хопла, сопряженные между собой устройство вращения зонда и устройство перемещения зонда, источник питания датчика Холла, подключенный к датчику Холла, выход которого соединен с входом усилителя, о тл и чающееся тем, что, с целью повышения точности измерения и автоматизации процесса измерения, в него дополнительно введены блок сопряжения, блок управления, последовательно соединенные кодовый датчик углового положения зонда, формирователь сигналов датчика, блок выборки и хранения, аналоговый вычислительный блок, блок индикации, выход формирователя сигнала датчика соединен с входом блока управления, второй вход блока выборки и хранения соединен с выходом усилителя, первый выход устройства управления подключен к блоку сопряжения, первый выход которого подключен к входу устройства перемещения зонда, а второй - к входу устройства вращения зонда, второй вход блока индикации соединен с третьим выходом блока управления, а кодовый датчик углового положения сопряжен с устройством вращения зонда и с датчиком Холла.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАВИГАЦИОННЫЙ ПРИБОР | 1999 |
|
RU2160431C2 |
| Многоканальный тесламетр | 1982 |
|
SU1026099A1 |
| Устройство для измерения и контроля расхода моторного масла | 1988 |
|
SU1597571A1 |
| МАЛОГАБАРИТНЫЙ АКУСТИЧЕСКИЙ МИКРОСКОП | 1995 |
|
RU2112969C1 |
| Измеритель плотности ткани по утку | 1982 |
|
SU1100340A1 |
| Каротажная станция | 1988 |
|
SU1749867A1 |
| УСТРОЙСТВО ДЛЯ КАРОТАЖНЫХ ЭЛЕКТРОМАГНИТНЫХ СКАНИРУЮЩИХ ЗОНДИРОВАНИЙ | 2010 |
|
RU2421760C1 |
| Способ поездного сигнализирования и устройство для его осуществления | 2019 |
|
RU2708411C1 |
| СИСТЕМА ДИАГНОСТИКИ ДАТЧИКОВ ХОЛЛА И СПОСОБ ЕЕ ПРИМЕНЕНИЯ | 2021 |
|
RU2762021C1 |
| СПОСОБ КОНТРОЛЯ КАЧЕСТВА РАБОТЫ МАШИН С ДИСКОВЫМИ РАБОЧИМИ ОРГАНАМИ ПРИ ВНЕСЕНИИ СЫПУЧИХ МАТЕРИАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2019948C1 |
Изобретение относится к электроизмерительной технике и может быть использовано для пространственного измерения со- ставляющих магнитных полей. Цель изобретения - повышение точности измерения при автоматизации процесса измерения. Устройство содержит зонд с датчиком Холла, устройство вращения зонда, устройство перемещения зонда, усилитель, источник питания датчика Холла, кодовый датчик углового положения зонда, устройство сопряжения, формирователь сигналов датчика, устройство управления, устройство выборки и хранения, аналоговое вычислительное устройство, блок индикации. 1 ил.слсV4 О О К>& СЛ Ю>&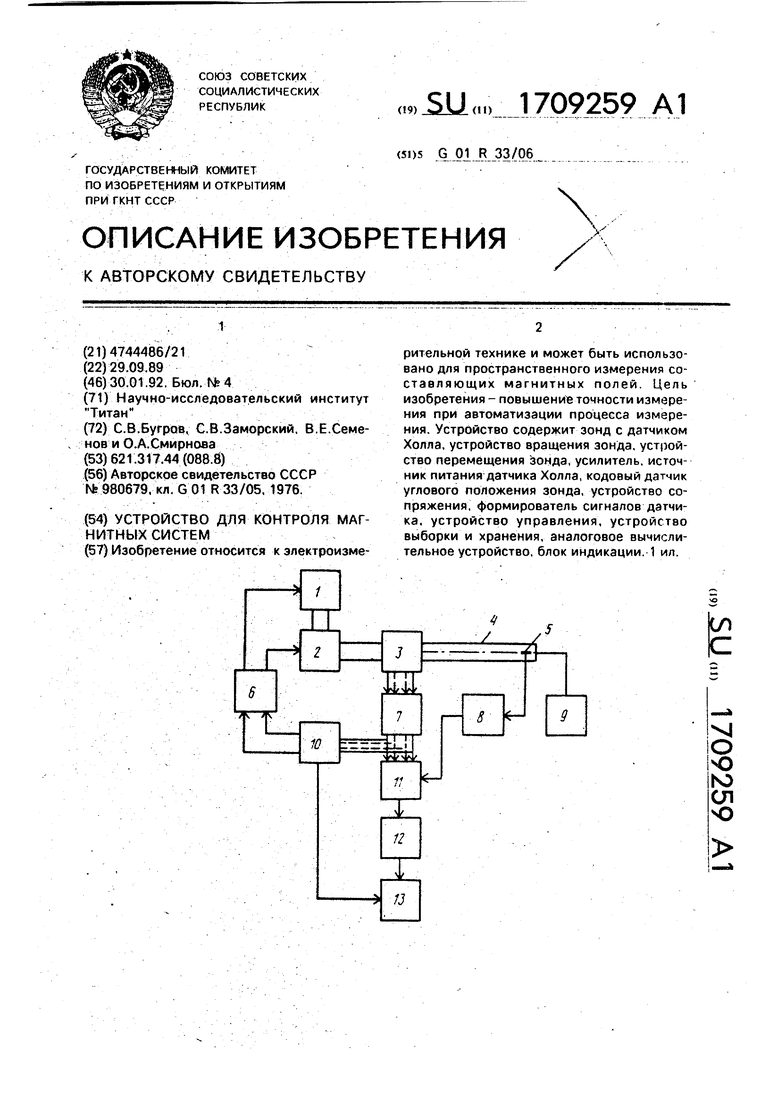
| Устройство для калибровки плодов | 1981 |
|
SU980679A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
