(54) УСТРОПСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ МАГНИТНОЙ ЛЕНТЫ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения перекосных колебаний движущейся магнитной ленты | 1979 |
|
SU781966A1 |
| Устройство для измерения попереч-НыХ пЕРЕМЕщЕНий МАгНиТНОй лЕНТы | 1978 |
|
SU798988A1 |
| Устройство для измерения поперечных и перекосных колебаний движущейся магнитной ленты | 1980 |
|
SU881854A1 |
| Устройство для измерения вибраций движущихся объектов | 1979 |
|
SU868369A1 |
| Устройство для измерения вибраций движущихся объектов | 1978 |
|
SU877348A1 |
| Устройство для измерения поперечных перемещений магнитной ленты | 1978 |
|
SU670979A1 |
| Лентопротяжный механизм | 1977 |
|
SU664207A1 |
| Устройство для измерения радиальных вибраций вала | 1977 |
|
SU868367A1 |
| Устройство для измерения вибраций ротора | 1978 |
|
SU868368A1 |
| Способ измерения скручивания движущейся ленты | 1977 |
|
SU670978A1 |
Изобретение относится к приборостроени и может быть использовано в аппаратах магнитной записи (АМЗ) повышенного класса точности в качестве устройства, поэволякнцего придать маг нитной ленте (мл) высокую точнбсть движения. Известно устройство, предназначен ное для точного направления Дймже гйя МЛ, содержащее конические направляющие ролики и рядом расположенные дат чики положения МЛ l. Однако в связи с отсутствием в та ком устройстве системы автоматическо регулировки лента в процессе движени получает сбои, что приводит к снижению достоверности при записи и воспроизведении информации. Наиболее близким к предлагаемому является устройство для управления движением МЛ, содержащее последовательно соединенные линию задержки (ЛЗ), сельсин-датчик, сельсин-приемник и усилитель, разные выхо.цы koToрого подключены к двум прнводам, свя занным с коническими направляющими роликами, а также два датчика, установленные с одного края МЛ, связанные через блок вычитания с интегратором 2. Однако это устройство не позволяет с достаточно высокой точностью и высоким быстродействием осуществлять возврат МЛ в исходное ее положение при возникновении поперечных и перекосных колебаний, что снижает достоверность записываемой и воспроизводимой информации. Цель изобретения - повышение точности и быстродействия возврата МЛ в исходное положение при возникновении ее поперечных и перекосных колебаний. Цель достигается за счет того, что устройство снабжено последовательно соединенными третьим датчиком, расположенным на одном уровне с двумя указанными датчиками, вторым блоком вычитания (БВ), вторым интегратором (ИР), третьим БВ, четвертым БВ, третьим ИР и сумматором, выход которого связан с входом ЛЗ, а также пятым БВ, включенным между выходом первого ИР и вторым входом четвертого БВ, при этом второй вход второго БВ связан с вторым датчиком, с втормм входом первого БВ и с вторым входом пятого БВ, а третип датчик - с вто,рым входом третьего БВ, выход которого соединен с вторым входом сумматора.
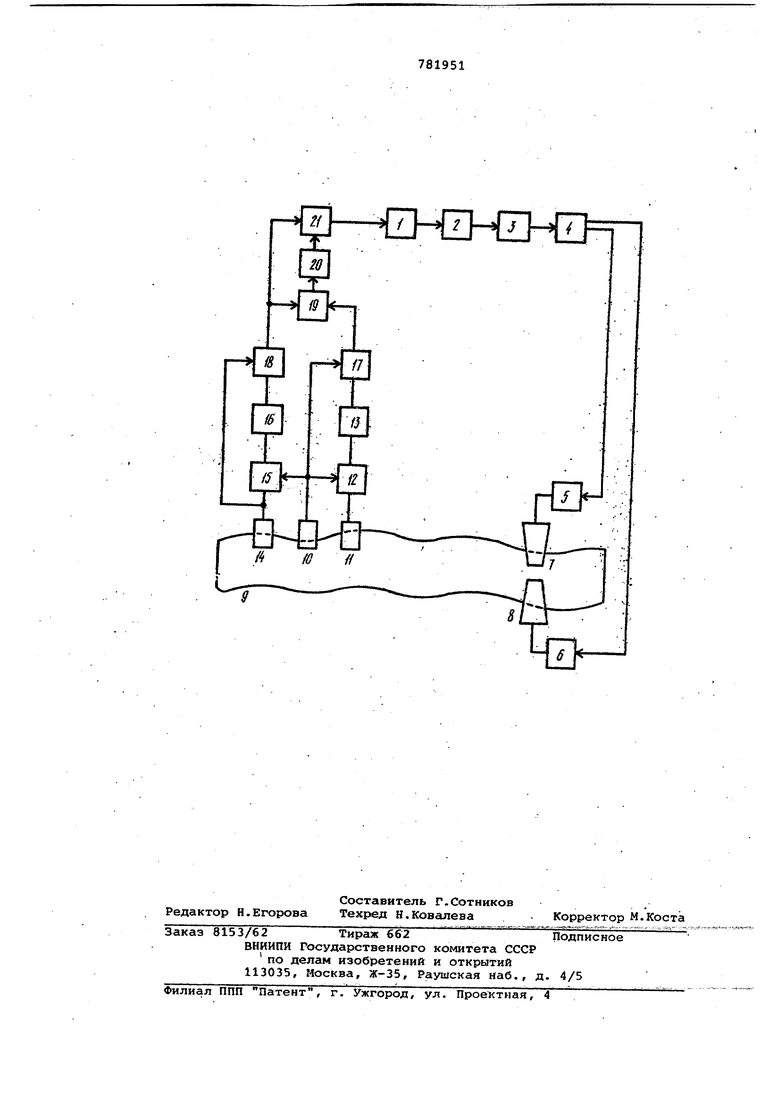
Н чертеже приведена схема предлагаемого устройства.
ЛЗ 1 через последовательно соединенные сельсин-датчик 2 и сел1ьсйнприемник 3 подключена к усилителю 4, связанному через приводы 5 и б с коническими роликами 7 и 8, направляю 1цими движение МЛ 9. По краю МЛ установлены датчики 10 и 11, подключенные через БВ 12 к ИР 13, и датчик 14, подключенный через БВ 15 к ИР 16. На -выходе ИР 13 установлен БВ 17, а на выходе ИР 16 установлен БВ 18. Блоки 17 и 18 через БВ 19, ИР 20 и сумматор 21 подключены к ЛЗ 1.
Устройство работает следующим образом.
В процессе движения МП могут воз никнуть поперечные и перекосные колебания, а также колебания, связанные с неравномерностью края самой МЛ. Тогда сигналы с датчиков поступают на БВ 12 и 15, после которых результирующий сигнал интегрируется в ИР 13 и 16. Полученный сигнал содержит две составляющие: сигнал неровности края МЛ и проинтегрированный сигнал перекосных колебаний, умноженный на величину расстояния между соседними датчиками. После вычитания БВ 17 и 18 сйзгналов, полученных с ИР 13 и 16 из сигналов с датчиков 10 и 14, возникает результирующее напряжение, пропорциональное величинам поперечных колебаний МЛ и ее перекосным колебаниям, умноженным на величину расстояния между соседни,ми датчиками. Послед-. НИИ. результирующий сигнал формируется по третьей составляющей, когда в ББ 19 сравниваются напряжения с блоков 17 и 18. В результате оказывается возможным исключить влияние в этой составляющей. Далее результирующий сигнал интегрируется в ИР 20 и подается на сумматор 21, который суммирует результирующий сигнал и сигнал с блока 18. ЛЗ 1 задержвает сигнал, полученный с сумматора, что позволяет отреагировать приводам в расчетное время именно на тот участок ленты, с которого поступил сигна на датчик 14. Тогда ролики 7 и 8 получают требуемый наклон и lOT вновь возвращается в исходное положение.
Использование предлагаемого устройства позволяет с высокой точностью, осуществлять управление движением МЛ, и,следовательно, с такой же точностью производить запись и воспроизведение информации.
Формула изобретения Устройство для управления движением магнитной ленты, содержащее последовательно соединенные линию задержки, сельсин-датчик, сельсин-приемник и усилитель, разные выходы которого подключены к двумприводам, связанным 5 с коническими направляющими роликами, а также два датчика, установленные с одного края магнитной ленты, связанные через блок вычитания с интегратором, 6 тличающееся тем, 0 что, с целью повышения точности и быстродействия возврата магнитной ленты в исходное положение при возникновении ее поперечных и перекосных колебаний, оно снабжено последовательно соединенными третьим датчиком расположенным на одном уровне с двумя указанными датчиками, вторым блоком вычитания, вторым интегратором, третьим блоком вычитания, четвертым блоком вычитания, третьим интегратором и сумматором, выход которого связан с входом линии задержки, а также пятым блоком вычитания, включенным между выходом первого интегратора и вторым входом четвертого блока вычитания, при этом второй вход второго блока вычитания связан с вторым датчиком, с вторым входом первого блока вычитания и с вторым входом пятого блока вычитания, а третий датчик - с вторым входом третьего блока вычитания, выход которого соединен с вторым входом сумматора.
Источники информации, 5 приняты во внимание при экспертизе
I 347790, кл. G 11 В 15/18, 10.08.72.
кл. G 11 В 15/18, 01.12.. 77.
