(54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИЙ ДВИЖУЩИХСЯ ОБЪЕКТОВ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения вибраций движущихся объектов | 1979 |
|
SU868369A1 |
| Устройство для измерения радиальных вибраций вала | 1977 |
|
SU868367A1 |
| Устройство для измерения поперечных и перекосных колебаний движущейся магнитной ленты | 1980 |
|
SU881854A1 |
| Устройство для тарирования измерителя поперечных перемещений магнитной ленты | 1980 |
|
SU909708A1 |
| Устройство для измерения поперечных перемещений магнитной ленты | 1978 |
|
SU670979A1 |
| Устройство для управления движением магнитной ленты | 1979 |
|
SU781951A1 |
| Устройство для исследования лентопротяжного механизма | 1977 |
|
SU664029A1 |
| Устройство для измерения попереч-НыХ пЕРЕМЕщЕНий МАгНиТНОй лЕНТы | 1978 |
|
SU798988A1 |
| Устройство для измерения перекосных колебаний движущейся магнитной ленты | 1979 |
|
SU781966A1 |
| Устройство для измерения колебаний натяжения движущейся магнитной ленты | 1977 |
|
SU664064A1 |
I , . . .
Изобретение относится к виброиз мерительной технике и мсжет быть использовано для измерения вибрации, например, магнитной двшкущейсй ленты в лентопротяжных механизмах.
Наиболее близким к предлагаемому является устройство дпя измерения вибраций движущихся объектов, содержащее три вибродатчика, связываемые с исследуемым объектом и устанавли ваемые последовательно в точках, выбранных на прямой} вдоль направления движения исследуемого объекта, линию задержки и блок вычитания, соединенные последовательно с первым вибродатчиком, вторую линию задержки и второй блок вычитания, соединенные последовательно со вторым вибродатчиком, к третьему вибродатчику подключен второй вход второго блока вычитания; третий блок вычитания, к двум входам которого подключены .соответственно выходы первого и второго блоков вычитания; интегратор.
подключенный к выходу третьего блока |БЬ1читаниЯа умножитель, второй интегратор и регистратор 1.13
Недостаток известного устройства - относительно низкая точность измерения, вследствие неполного исключения влияния перекоса движущегося объекта на точность измерения вибрации.
Цель изобретения - повышение точ10ности измерения вибрации.
Указанная цель достигается тем, что устройство снабженно сумматором, первый вход которого подключен к вы15ходу -первого блока вычитания, второй - к первому интегратору и третий к выходу третьего блока вычитания через блок умножения, а выход сумматора подключен через второй интег30-ратор к регистратору.
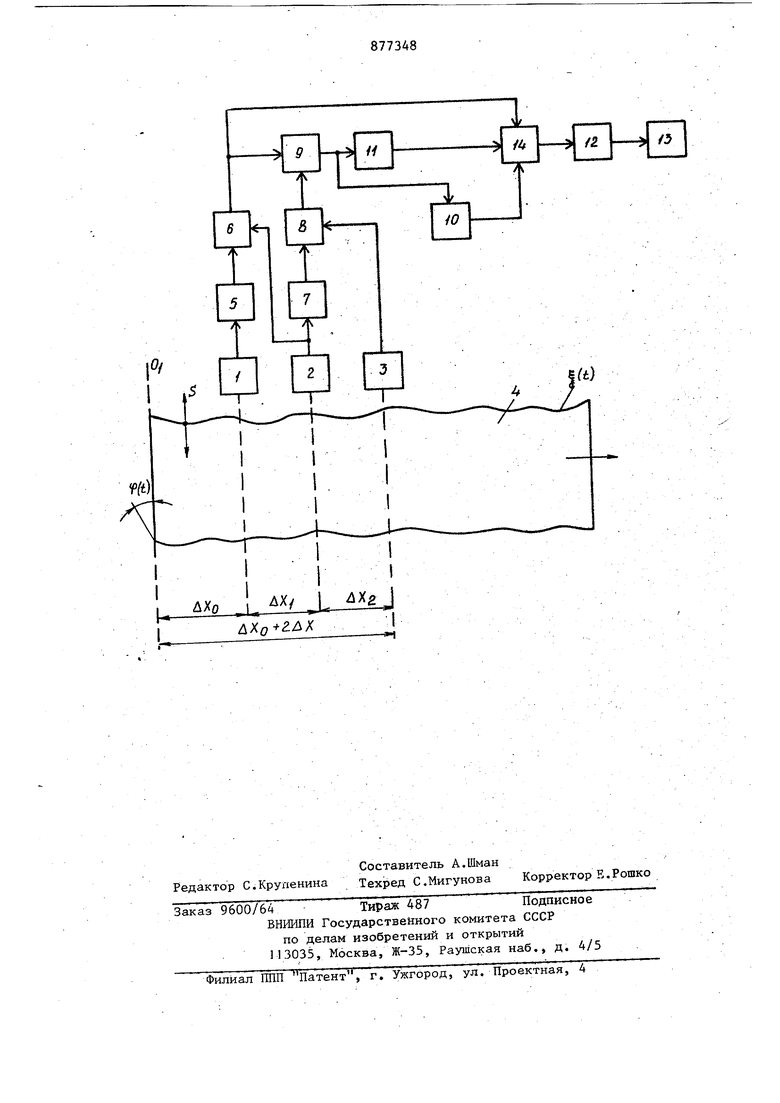
На чертеже изображена блок-схема устройства для измерения вибрации движущихся объектов.
Устройство для измерения вибраций движущихся объектов, содержит три вибродатчика 1-3, связываемые с исследуемым объектом 4 и устанавливаемые последовательно в точках, выбранных на прямой вдоль направления движения исследуемого объекта, линию 5 задержки и блок 6 вычитания, соединенные последовательно с первым вибродатчиком 1, вторую линию 7 задержки и второй блок 8 вычитания, соединенные последовательно со вторым вибродатчиком 2, к третьему вибродатчику подключен второй вход второго блока вычитания, третий блок 9 вычитания, к двум входам которого подключены соответственно выходы первого и, второго блоков 6 и 8 вычитания, интегратор 10, подключенный к выходу третьего блока 9 вычитания, У1 1ножитель П, второй интегратор 12,, регистратор 13, сумматор 14, первый вход которого подключен к выходу первого блока 6 вычитания, второй к первому интегратору 10 и третий к выходу третьего блока 9 вычитания через блок 11 уМ1Южения, а выход сумматора 14 подключен через второй интегратор 12 к регистратору 13.
Устройство работает следующим образом.
При движении объекта 4, например магнитной ленты, с неровностью f(t) ребра создаются поперечные вибрации S(t) и колебания углового перекоса f(t), С помощью вибродатчиков 1-3 указанные суммарные колебания преобразуются в электрические сигналы. Сигналы вибродатчиков I и 2 задерживаются линиями 5 и 7 задержки на время движения точки измерения от вибродатчика 1 до вибродатчика 2 и от вибродатчика 2 до вибродатчика 3 соответственно. Задержанный сигнал вибродатчика 1 вычитается в блоке 6 вычитания из сигнала датчика 2, а задержанный сигнал датчика 2 вычитается н блоке 8 вычитания из сигнала датчика 3. После вычитания в блоке 9 вычитания сигналов блоков 6 и В получается сигнал, пропорциональный колебаниям угла перекоса fCt).
Для компенсации колебаний углового перекоса Ч(t) движущегося объекта осуществляются следующие операции. Сигнал блока 9 умножается умножителе 1 1 на соотношение между расстоянием iXo от оси 00 перекоса ленты 4 до точки измерения первого вибродатчика
с расстоянием X-f между первыми двумя вибродатчиками 1 и 2 и подается на третий вход сумматора 14. На второй вход сумматора 14 подается проинтегрированный интегратором 10 сигнал блока 9 вычитания. На первый вход сумматора 14 подается сигнал с выхода блока 6 вычитания, пропорциональный сумме двум составля1 щим колебаний
перекоса (t) и поперечным вибрациям S(t) После алгебраического суммирования в сумматоре 14 указанных сигналов и интё грирования в интеграторе 12 получается сигнал, пропорцио.наль5 ный поперечным вибрациям S(t) движущейся магнитной ленты 4, который записывается регистратором 13.
Описываемое устройство позволяет повысить точность определения вибрации S{t) движущейся ленты, поскольку исклзоЧается влияние всех составляющих колебаний перекоса MCt) на точностьизмеренид.
Формула изобретения
Устройство для измерения вибраций движущихся объектов, содержащее три вибродатчика, связываемые с исследуемым объектом и устанавливаемые . последовательно в точках, выбранных на прямой вдоль направления движения исследуемого объекта, линию задержки и блок вычитания, соединенные последовательно с первым вибродатчиком, вторую линию задержки и второй блок вычитания, соединенные последовательно со вторым вибродатчиком, к третьему вибродатчику подключен второй вход, второго блока вычитания, третий блок вьгчгйтания, к двум входам которого подключены последовательно выходы первого и второго блоков вычитания, интегратор, подключённый к выходу третьего блока вычитания, умножитель, второй интегратор и регистратор, отличающе еся тем, что, с целью повьшения точности измерения вибраций, оно снабжено сумматором, первый вход которого подключен к выходу первого блока вычитания, второйк первому интегратору и третий - к
0 выходу третьего блока вычитания через блок умножения, а выход сумматора подключен через второй интегратор к регистратору.
Источники информации,.
5 принятые во внимание при экспертизе
Т
