форма ребра контролируемой магнитно ленты и ее сабельность.
Целью изобретения является уменьшение влияния на результаты проводимых измерений формы ребра контролируемой магнитной ленты и ее сабельности.
Указанная цель достигается тем, что устройство для измерения поперечных и перекосных колебаний движущейся магнитной ленты, содержащее установленные один за другим вдоль одного из ребер магнитной ленты фотоэлектрические датчики, расположенный напротив датчиков источник света с оптической системой, а также последовательно соединенные первый блок вычитания, делитель, фиЛьтр выделения постоянной составляющей, умножитель, второй вход которого связан с выходом первого блока вычитания, второй блок вычитания и регистратор снабжено включёнными между первым по ходу движения магнитной ленты фотоэлектрическим датчиком и вторым йходом второго блока вычитания последовательно соединенными третьим и четвертым блоками вычитания, первым интегратором, вторым интегратором и пятым блоком вычитания, а также включеннь между третьим фотоэлектрическим датчиком и вторым входом четвертого блока вычитания шестым блоком вычитания, второй вход которого связан с вторым фотоэлектрическим датчиком и с вторыми входами трютьего и пятого блоков вычитания, при выходы третьего блока вычитания и первого интегратора подключены также к разным входам первого блока вычитания, выход второго интеграторов ко второму входу регистратора, второй вход второго блока вычитания ко второму входу делителя, а второй вход умножителя - к третьему входу регистратора.
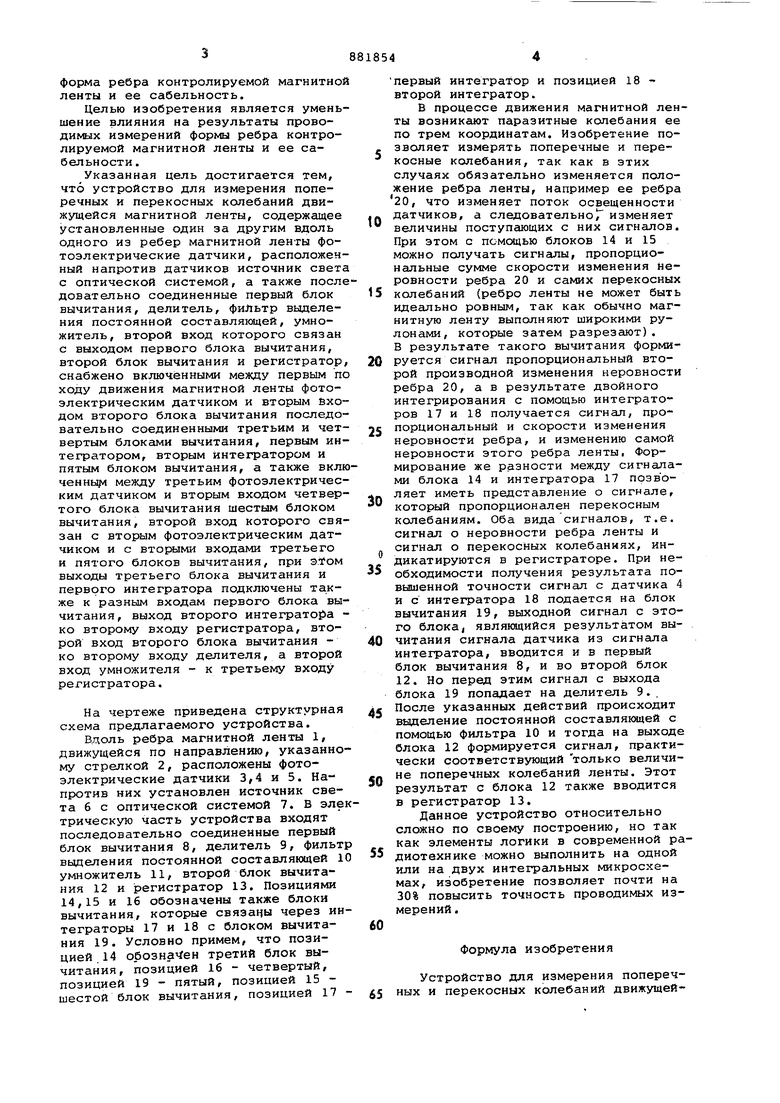
На чертеже приведена структурная схема предлагаемого устройства.
Вдоль ребра магнитной ленты 1, движущейся по направлению, указанному стрелкой 2, расположены фотоэлектрические датчики 3,4 и 5. Напротив них установлен источник света 6 с оптической системой 7. В электрическую часть устройства входят последовательно соединенные первый блок вычитания 8, делитель 9, фильтр вьщеления постоянной составляющей 10 умножитель 11, второй блок вычитания 12 и регистратор 13. Позициями 14,15 и 16 обозначены также блоки вычитания, которые связаны через интеграторы 17 и 18 с блоком вычитания 19. Условно примем, что позицией 14 обозначен третий блок вычитания, позицией 16 - четвертый, позицией 19 - пятый, позицией 15 шестой блок вычитания, позицией 17 первый интегратор и позицией 18 второй интегратор.
В процессе движения магнитной ленты возникают паразитные колебания ее по трем координатам. Изобретение позволяет измерять поперечные и перекосные колебания, так как в этих случаях обязательно изменяется положение ребра ленты, например ее ребра 20, что изменяет поток освещенности датчиков, а следовательноГ изменяет величины поступающих с них сигналов. При этом с помощью блоков 14 и 15 можно получать сигналы, пропорциональные сумме скорости изменения неровности ребра 20 и самих перекосных колебаний (ребро ленты не может быть идеально ровным, так как обычно магнитную ленту выполняют широкими рулонами, которые затем разреза1ют). В результате такого вычитания формируется сигнал пропорциональный второй производной изменения неровности ребра 20, а в результате двойного интегрирования с помощью интеграторов 17 и 18 получается сигнал, пропорциональный и скорости изменения неровности ребра, и изменению самой неровности этого ребра ленты, Формирование же разности между сигналами блока 14 и интегратора 17 позволяет иметь представление о сигнале, который пропорционален перекосным колебаниям. Оба вида сигналов, т.е. сигнал о неровности ребра ленты и сигнал о перекосных колебаниях, индикатируются в регистраторе. При необходимости получения результата повышенной точности сигнал с датчика 4 и с интегратора 18 подается на блок вычитания 19, выходной сигнал с этого блока, являкяцийся результатом вычитания сигнала датчика из сигнала интегратора, вводится и в первый блок вычитания 8, и во второй блок 12. Но перед этим сигнал с выхода блока 19 попадает на делитель 9. После указанных действий происходит выделение постоянной составляющей с помощью фильтра 10 и тогда на выходе блока 12 формируется сигнал, практически соответствующий только величине поперечных колебаний ленты. Этот результат с блока 12 также вводится в регистратор 13.
Данное устройство относительно сложно по своему построению, но так как элементы логики в современной радиотехнике можно выполнить на одной или на двух интегральных микросхемах, изобретение позволяет почти на 30% повысить точность проводимых измерений.
Формула изобретения
Устройство для измерения поперечных и перекосных колебаний движущей

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения вибраций движущихся объектов | 1978 |
|
SU877348A1 |
| Устройство для измерения вибраций движущихся объектов | 1979 |
|
SU868369A1 |
| Устройство для измерения перекосных колебаний движущейся магнитной ленты | 1979 |
|
SU781966A1 |
| Устройство для управления движением магнитной ленты | 1979 |
|
SU781951A1 |
| Устройство для измерения поперечных перемещений магнитной ленты | 1978 |
|
SU670979A1 |
| Устройство для измерения радиальных вибраций вала | 1977 |
|
SU868367A1 |
| Устройство для измерения вибраций ротора | 1978 |
|
SU868368A1 |
| Устройство для измерения попереч-НыХ пЕРЕМЕщЕНий МАгНиТНОй лЕНТы | 1978 |
|
SU798988A1 |
| Устройство для измерения зависимости натяжения от скручивания движушейся магнитной ленты | 1978 |
|
SU669404A1 |
| Устройство для тарирования измерителя поперечных перемещений магнитной ленты | 1980 |
|
SU909708A1 |
