(54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАДИАЛЬНЫХ ВИБРАЦИЙ ВАЛА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения вибраций движущихся объектов | 1978 |
|
SU877348A1 |
| Устройство для измерения вибраций движущихся объектов | 1979 |
|
SU868369A1 |
| Устройство для измерения поперечных и перекосных колебаний движущейся магнитной ленты | 1980 |
|
SU881854A1 |
| Устройство для тарирования измерителя поперечных перемещений магнитной ленты | 1980 |
|
SU909708A1 |
| Устройство для измерения вибраций ротора | 1978 |
|
SU868368A1 |
| Устройство для измерения попереч-НыХ пЕРЕМЕщЕНий МАгНиТНОй лЕНТы | 1978 |
|
SU798988A1 |
| Устройство для измерения поперечных перемещений магнитной ленты | 1978 |
|
SU670979A1 |
| Устройство для управления движением магнитной ленты | 1979 |
|
SU781951A1 |
| Устройство для измерения зависимости натяжения от скручивания движушейся магнитной ленты | 1978 |
|
SU669404A1 |
| Устройство для регистрации сигналов акустической эмиссии | 1979 |
|
SU903762A1 |
I ,
Изобретение ехтносится к виброизмеритепьной технике и может быть испопьЗовано при измерениях вибрации вала, например, лентопротяжных механизмов, устройств точной магнитной записи и восщо- изведения сигналов.
Известно устройство для измерения радиальных вибраций вала, содержащее два датчика. Датчики расположены по периметру на одной плоскости и подключе- ц ны к схеме исключения влияния неровности поверхности шейки вала Ll3 .
Недостатком устройства является низкая точность измерения из-за влияния перекоса шейки на результат измерения. fj
Известно также устройство для измерения радиальных вибраций вала содерг жащее три датчика, подключенных к 6inoKy вычитания и сумматору . Недостатками указанного устрюйства является низкая точность измерения из-за влияния перекосов вала, когда точка оси перекоса не находится в середине образующей вала.
Наиболее близким по технической сущности к предлагаемому является устройство для измерения радиальных вибраций вала, содержащее два датчика, последовательно соединенные с первым из них линию задержки, блок вычитания, дополни- тельный вход которого подключен к второму датчику, интегратор и регистратор Гз.
Недостатком известного устройства является низкая точность измерения из-за влияния изменения положения оси перекоса шейки.
Цель изобретения - повыщение точности измерений.
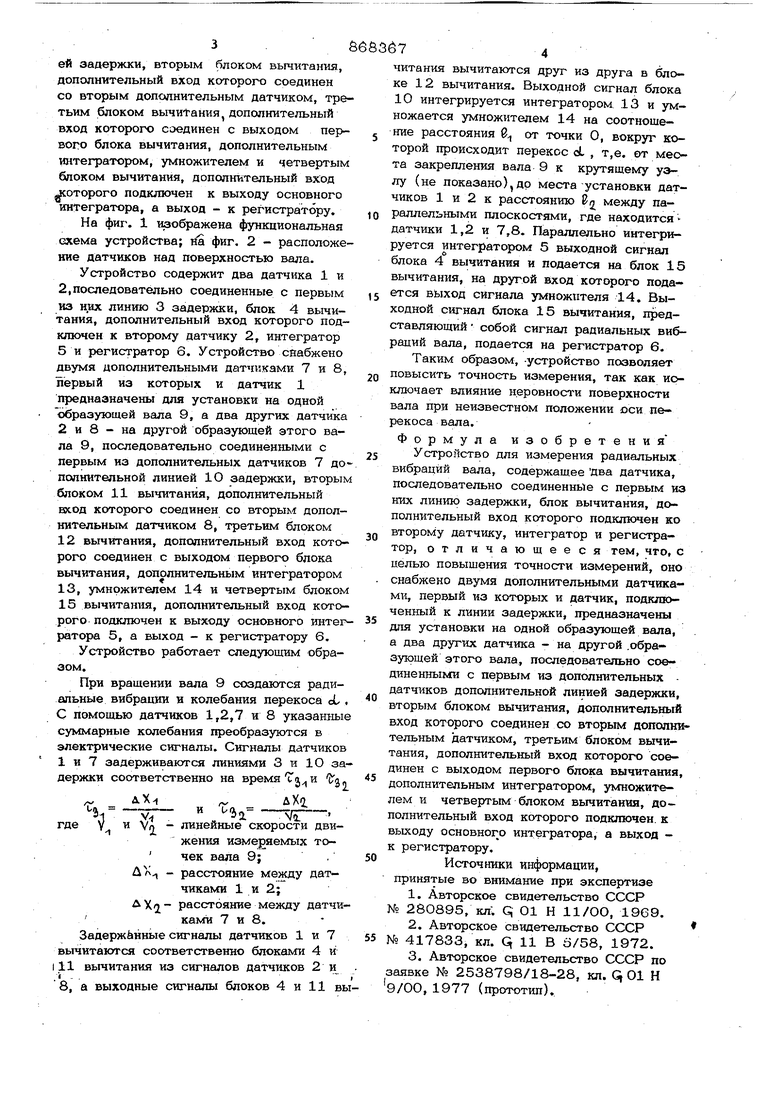
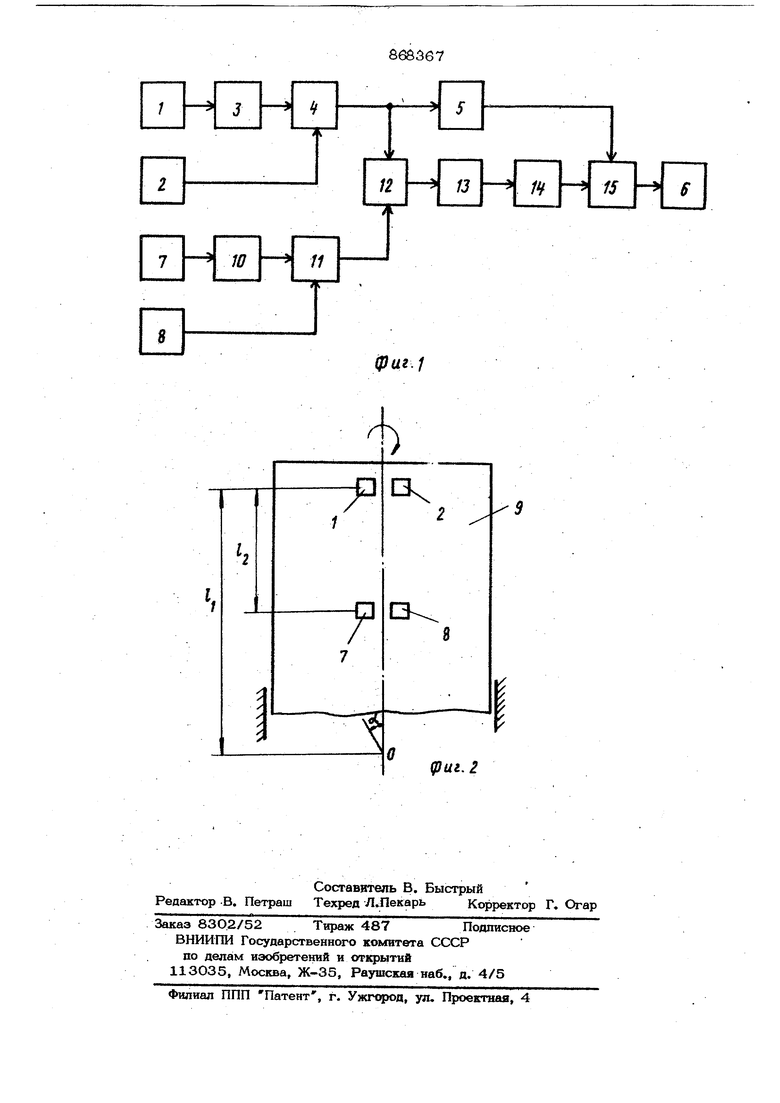
Указанная цель достигается тем, что устройство снабжено двумя дополнительными датчиками, первый из которых и дат- чик, подключенный в линии задержки, предназначены для установки на одной образу,Х)щей вала, а два других датчика - на другой образующей этого вала, последовательно соединенными с первым из дополнительных датчиков цополнительной задержки, вторым блоком вычитания, дополнительный вход которого соединен со вторым дополнительным датчиком, третьим блоком вычиtания, дополнительный вход которого соединен с выходом первого блока вычитания, дополнительным интегратором, умножителем и четвертым блоком вычитания, дополнительный вход jcoToporo подключен к выходу основного интегратора, а выход - к регистратору. На фиг. 1 изображена функциональная (зхема устройства; на фиг. 2 - расположе ние датчиков над поверхностью вала. Устройство содержит два датчика 1 и 2,последовательно соединенные с первым из них линию 3 задержки, блок 4 вычитания, дополнительный вход которого подключен к второму датчику 2, интегратор 5 и регистратор 6. Устройство снабжено двумя дополнительными датчиками 7 и 8, первый из которых и датчик 1 предназначены для установки на одной образующей вала 9, а два других датчика 2 и 8 - на другой образующей этого вала 9, последовательно соединенными с первым из дополнительных датчиков 7 до полнительной линией 10 задержки, вторым блоком 11 вычитания, дополнительный Екод которого соединен со вторым дополнительным датчиком 8, третьим блоком 12 вычитания, дополнительный вход которого соединен с выходом первого блока вычитания, дополнительным интегратором 13, умножителем 14 и четвертым блоком 15 вычитания, дополнительный вход которого подключен к выходу основного интег ратора 5, а выход - к регистратору 6. Устройство работает следующим образом. При вращении вала 9 создаются радиапьные вибрации и колебания перекоса cL С помощью датчиков 1,2,7 и 8 указанны суммарные колебания преобразуются в электрические сигналы. Сигналы датчиков 1 и 7 задерживаются линиями 3 и 1О за держки соответственно на время 7j и . V-, 2. Уг и VA - линейные скорости движения измеряемых то чек вала 9;. Д л - расстояние между датчиками 1 и 2; Д Хо - расстояние между датчи ками 7 и 8. Задержанные сигналы датчиков 1 и 7 вычитаются соответственно блоками 4 и 111 вычитания из сигналов датчиков 2 и 8, а выходные сигналы блоков 4 и 11 в читания вычитаются друг из друга в блоке 12 вычитания. Выходной сигнал блока 10 интегрируется интегратором 13 и умножается умножителем 14 на соотношение расстояния б от точки О, вокруг которой происходит перекос cL , т,е. от места закрепления вала 9 к крутящему узлу (не показано),до места установки датчиков 1 и 2 к расстоянию Р между параллельными плоскостями, где находится датчики 1,2 и 7,8. Параллельно интегрируется интегратором 5 выходной сигнал блока 4 вычитания и подается на блок 15 вычитания, на другой вход которого подается выход сигнала умножителя 14. Выходной сигнал блока 15 вычитания, представляющий собой сигнал радиальных вибраций вала, подается на регистратор 6. Таким образом, -устройство позволяет повысить точность измерения, так как ирключает влияние неровности поверхности вала при неизвестном положении оси перекоса вала. Формула изобретения Устройство для измерения радиальных вибраций вала, содержащее Два датчика, последовательно соединенные с первым из них линию задержки, блок вычитания, дополнительный вход которого подключен ко второму датчику, интегратор и регистратор, отличающееся тем, что, с целью повышения точности измерений, оно снабжено двумя дополнительными датчиками, первый из которых и датчик, подключенный к линии задержки, предназначены для установки на одной образующей вала, а два других датчика - на другой .образующей этого вала, последовательно соединенными с первым из дополнительных датчиков дополнительной линией задержки, вторым блоком вычитания, дополнительный вход которого соединен со вторым дополнительным датчиком, третьим блоком вычитания, дополнительный вход которого соединен с выходом первого блока вычитания, дополнительным интегратором, умножителем и четвертым блоком вычитания, дополнительный вход которого подключен, к выходу основног о интегратора, а выход к регистратору. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 280895, кл; Q 01 Н 11/ОО, 1969. 2.Авторское свидетельство СССР № 417833, кл. Q 11 В 5/58, 1972. 3.Авторское свидетельство СССР по заявке № 2538798/18-28, кл. Q 01 Н 9/00, 1977 (прототип).
фиг.1
(pui.2
