1 .
Изобретение относится к произвол-л ству специальных электрических машин, которые используются в быстродействующих автоматических системах регулирования .
Известен двигатель поперечHortj, поля (ДПП) с зубчатым якорем, представляющий собой конструктивно электро- машинный усилитель поперечного поля (ЭМУ) с дополнительной пусковой об- «О моткой по поперечной оси (без нее пуск ЭМУ в двигательном режиме невозможен) .
Применение ДПП в системах автоматического регулирования в качестве 15 исполнительного двигателя с широким диапазоном регулирования скорости позволяет использовать усиление обоих каскадов и вести регулирование ма- шины сигналами от разных управлякадих 20 элементов fl..
Однако известный ДПП обладает недостаточной динамической устойчивостью, имеет исключительно тяжелую коммутацию, и не отвечает требованиям 25 быстродействия.
Известен также ДПП с применением беспазового (гладкого) якоря С2.
Кроме улучшения динамической ус- I тойчивости икоммутации в этом дви- ) 30
гатёле появляется возможность упростить конструкцию статора, применив сосредоточенную компенсационную об-
мотку.;
Недостатком известного двигателя является то, что обмотки управления, как и в ЭМУ расположены Hai статоре по продольной оси в одних лазах с компенсационной обмоткой, что приводит к появлению обратной связи по потоку продольной цепи, протекающеjviy по компенсационной обмотке. Эта рбратная ёвязь при больших;нагрузках ухудшает динамические характеристики двигателя.
Кроме того, ДПП имеет сравнительно невысокое быстродействие из-за существенной маховой массы якоря (хотя и лучше, чем в ДПП с зубчатым якорем)..
Цель изобретения - улучшение динамических характеристик двигателя путем обратной связи по току нагрузки между компенсационной обмоткой и обмотками управления.и увеличение быстродействия ,
Указанная цель достигается тем, , что магнитопровод статора выполнен в виде двух концентрично установленных яастей, между которыми размещен польА
якорь, акомпенсационная обмотка и обмотка управления расположены на разных чайтях магнитопровода.
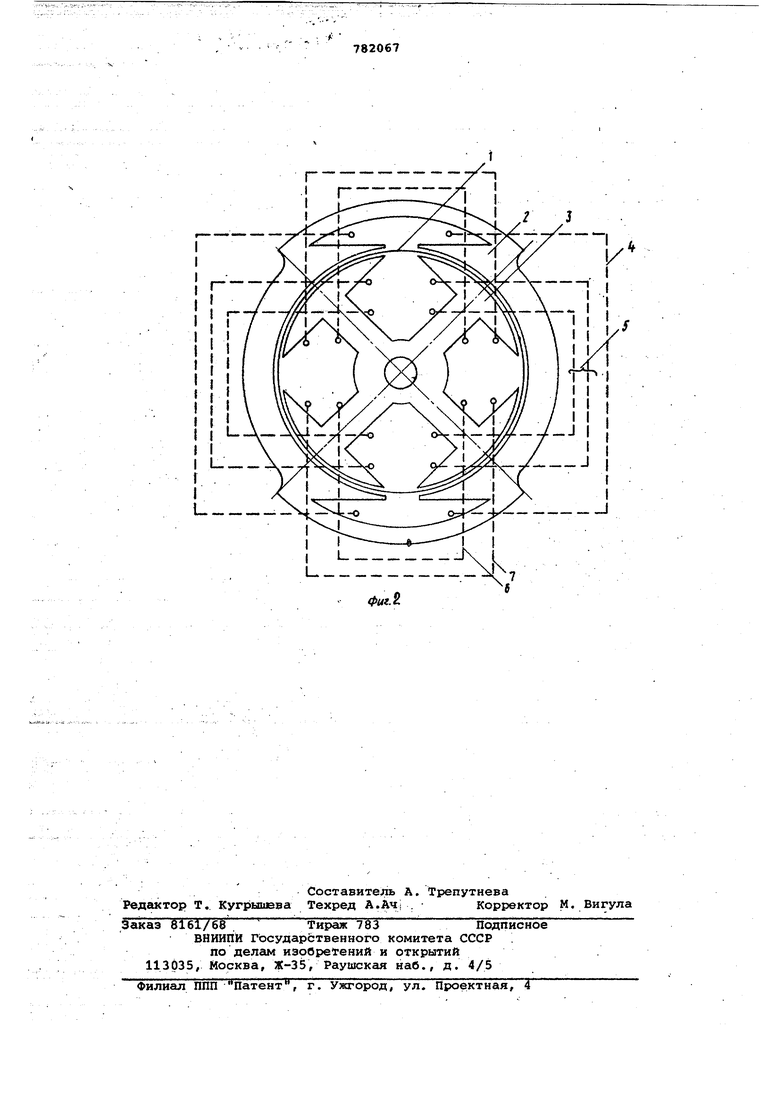
Йа фйг. 1 й фиг, 2 пЬкаэаньд два варианта магнитной системы (при отнрс11тёльж врЖц1Ш йг Ш«Ь1ШкгЙйШётpax якоря).
Система содержит полый якорь 1, неподвижные статоры - внешний 2 и внутренний 3, в малых пазах статора по продольной оси расположена сосредоточенная компенсационная обмотка 4 , в больших пазах, ориентированных как К Majtiiae, но расположённых на другом CtaTOpe лежат обмотки 5 управления, ir Средних пазах статора, по поперечной оси, расположены пусковая 6 и подмагничивающая 7 ббмотки.
При небольших диаметрах якоря целесообраэно сохранить традиционную форму внешнего статора, поместив в пары внутреннего статора только сосредоточенную компенсационную обмотку, След;ует отменить, что в обоих вариантах сечение участков магнитопрвйода внешнего и внутреннего статора, по которым протекают одинакоBfcje магнитные потоки (первого и второго каскадов) легко выполнить примерно равными, что препятствует насы1цению отдельных участков,
Приведенные варианты конструкции ДПП обеспечивают высокую динамическую устойчивость, быстродействие, дают экономию меДи за счет сосредоточенной компенсационной обмотки, Кройё foro7 сущёственйЬ уменьшайте iiiyмы, вибрации и помехи, так как отсутствуют зубцовые гармонические, гарантируется темная коммутация, При этом полностью устраняется обратная связь по току нагрузки,
Формула изобретения
Двиг1э1тель поперечного поля с беспазрвьм якорем, содержащий магнитопровод статора с пазами для размещени сосредоточенной компенсационной обмотки и обмотки управления по продольной оси, пусковой и подмагничивающей обмотЬк - по поперечной оси, отличающийся тем, что, с целью улучшения динамических характеристик двигателя путем устранения обратной связи по току нагрузки между компенсационной обмоткой и обмотками управления и увеличения быстродействия, магиитопровод статора выполнен в виде двух концентрично размещенных частей, между которьми установлен полый якорь, а компенсационная обмотка и обмотка управления размещены на разных частях магнитопровода,
Источники информации, принятые во внимание при экспертизе
1, Борисов В, А, Исследование работы электромашинного усилителя с поперечным возбуждением, 1949, с, 64.
2 , Скороспешкин А, И, и др, Выбор компенсационной обмотки в ЭМУ с гладKftM якорем. Известия Томского политехнического института, Трмск, 1971,
Г
L
П
I
l
Фиг.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрическая машина поперечного поля | 1982 |
|
SU1030928A1 |
| Двухканальный следящий привод | 1975 |
|
SU809050A2 |
| Двигатель поперечного поля | 1985 |
|
SU1251243A1 |
| Двигатель поперечного поля | 1980 |
|
SU868939A1 |
| Следящий электропривод | 1985 |
|
SU1328915A1 |
| Электропривод постоянного тока | 1985 |
|
SU1394382A1 |
| Электромашинный генератор импульсов | 1981 |
|
SU997192A1 |
| Электромашинный усилитель поперечного поля | 1978 |
|
SU780107A1 |
| Электрический двигатель возвратно- поступательного движения | 1978 |
|
SU758417A1 |
| ЭЛЕКТРОМАШИННЫЙ УСИЛИТЕЛЬ ПОПЕРЕЧНОГО ПОЛЯ | 1969 |
|
SU243028A1 |