(54) СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОЛЕС.1ЫХ ТРАКТОРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
1
Изобретение относится к области сельскохозяйственного машиностроения, в частности, применено в устройствах для обработки почвы.5
Известен способ управления движением, включающий компенсацию отклонения, направляющих колес посредством обратной связи l.
Наиболее близким к 113Обре.тению fQ способом управления движением явлйется способ, включающий поворот направляющих колес при появлении сигнала рассогласования с заданным направлением движения 2.и
Недостатком этих способов является то, что они обладают недостаточно качественной точностью вождения.
Известно устройство, включающее обратную связь, выполненную в виде JQ двух пружин, закрепленных на штанге, и связанную с золотником гидрораспределителя l.
Наиболее близким техническим решением к изобретению является устройст-25 во для управления движением, включающее датчик, пусковую аппаратуру, зо летник,.силовой цилиндр, рулевую колонку, связанную с осью поворота направляющих колес , и гидроклапаны 2, JQ
Недостатком этих устройств является сложность их автоматического вождения.
Целью изобретения является повышение точности володения.
Это достигается тем, что при повороте направляющим колесам сообщают принудительное реверсивно-вращательное движение с угловой скоростью, пропорциональной скорости поступательного движения трактора.
С целью упрощения автоматического вождения устройство снабжено полуцилиндрическим элементом с установленными на нем четырьмя контактами, двумя поля;ризованными реле, Чзвязанными с контактами полуцилиндрического элемента , соленоидными гидроклапанами, управляемым выпрямителем и программирующим механизмом, при этом полуцилиндрический элемент кинематически связан с программирующим механизмом с одной стороны и с рулевой колонкой - с другой, а на оси поворота направляклцих колес трактора симметрично его продольной оси установлены два контакта, взаимодействующие с контактами каждого поляризованного реле, причем поляризованные реле соединены через пусковую аппаратуру с обмотками соленоидныхгидроклапанов,,
которые электрически связаны с управляемом выпрямителем.
При этом для регулирования степени открытия золотника управляемый выпрямитель снабжен датчиком индукционно1 бтй па и задатчиком, связанными через схему вычитания друг с другом, при этом задатчик посредством сравнивайщёго и усилительного элементов подключен к выпрямителю, а датчик электрически соединен с осью поворота направляющих колес.
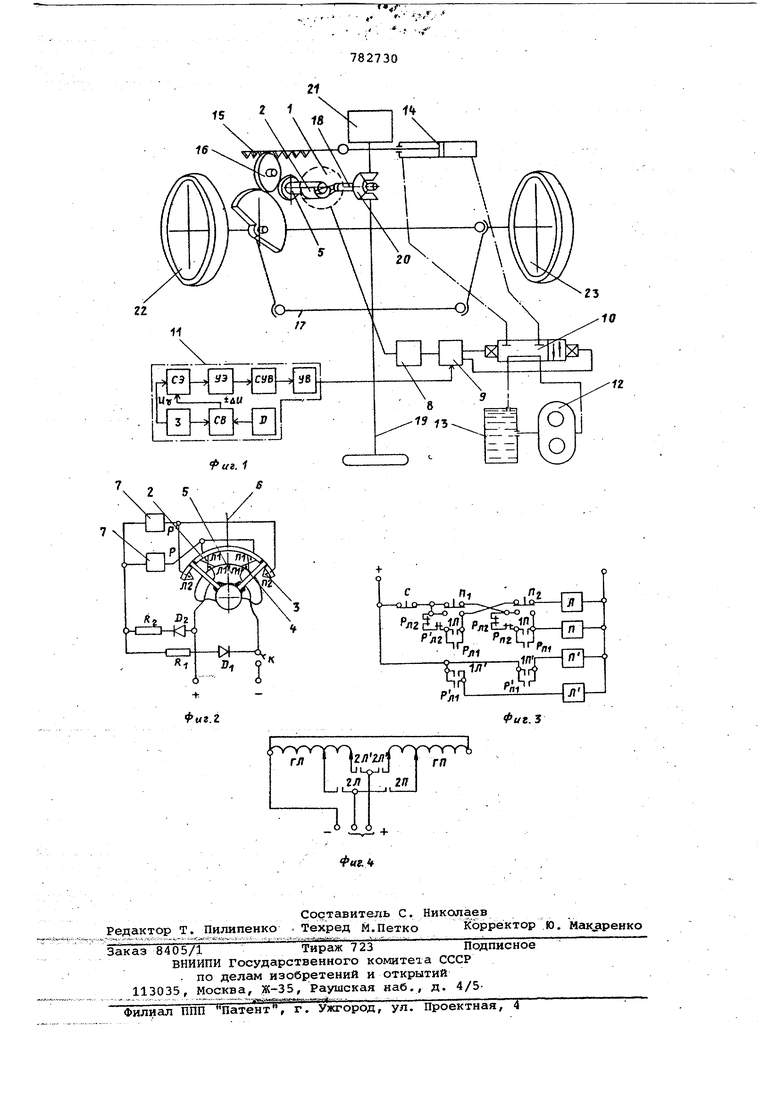
На фиг. 1 изображена схема-устройства управления; на фиг. 2 - орган управления с электрической схемой; на -фиг. 3 -. схема пусковой аппаратуры; на фиг. 4 - катушка соленоидных гидроклапанов.
Устройство содержит орган управления 1, состоящий из-управляющего полуцйлиндрического элемента 2, на котором закреплены по. дуге четыре контакта 3, два из них Л1 и Л2 - левые,
три на: верхнем уровне отнОсительйо вертикальной оси будут замыКаться
Правым KOHTakTOM П1 4, а остальные П1 и П2 - Правые, три в нижнем уров,нё будут замыкаться левым контактом Л14, расположенным на поворотной оси 5 симметрично относительно осевой линии 6 продольной базытрактора, контйкты связаны с двумя поляризов.анными реле (Р и Р )7.
Выходы органа управления 1 или ключи поляризованных реле 7 соединены с выводами пусковой аппаратуры 8, контактные ключи которой подключены к выводам катушки соленоидных гйдроклапанов 9 регулируемого двухпозй - - i ционного электрогидравлического зо лотннка 10. Катушки соленоидных гидрдклапанрв 9 пйтаютея;;рт; ав;гоматическй управляемого выпрямителя 11. Элемёйты последнего, например задатчйк (3) , связан как через срав.нива1о14ий и усилительный элементы (СЭ и УЭ). со схемой управления выпрямителя (СУВ), и совместно .с датчиком (Д) через схему вычитания (СВ), а схема управпёшя сайзана с управляемым выпрямителем (ув).Гидравлические каналы золотника 10 связаны, с гидронасосом 12,масляным баком 13 и гидроййлиндром 14, встроенным в тягу 15 несущей зубчатой рейки J находящейе я в зацеплении с шестерней 16. Последняя с одной стороны связана с шестерней на поворотной оси (ду-блирующёй) 5, гой - через зубчатый сектор и рулевой трапецией 17.
При ручном (полуавтоматическом;управлении вал 18 полудилиндрйчёск6го элемента 2 связан с рулевой колонкой 19 посредством шестерни 20, а при автоматическом - с приводом программйрукздего механизма 21.
Устройство работает следующим обра зоМ.
При нажатии на кнопку П (фиг. 3) пусковой аппаратуры 8 оживляется катушка левого промежуточного реле Л и замыкаются контакты 1Л (фиг. 3) и 2л (фиг. 4j и срабатывает левый гидроклапан ГЛ (фиг. 4) двухпозиционного элеКтрогйдравлического золотника Ю, При этом от гидронасоса 12 в левую полость гидроцилиндра 14. поступает масло. Усилие от гидроцилиндра 14,воздействуя на тягу 15,заставля- ет поворачиваться шестерню 16, которая поворачивает рулевую трапецию 17 и управляющие колеса 22 и 23 в леёуго сторону . Одновременно шестерня 16 передает .вращение на ось 5 поворота. Через определенный промежуток времени , соответствующий заданному углу (о ,7 J jiOBOpoTa отклонения, левый . коитакт Л1 (фиг. 2) оси 5 поворота замыкается с правым контактом П1 по- -луцилиндрического элемента 2. В результате чего срабатывает правое плечо поляризованного реле (фиг. 2), замыкая нормально закрытые Ppjo.контакты. -.При этом левый гидроклапан 9 электрогидравличёского золотника 10 закрывается и о Крывается правый гидроклапан 9. Масло, поступив от гидронасоса 12 в правую полость гидроцилиндра 14 , поворачивает управляющие колеса 22 и 23 в противоположную сторону.
Давление масла в гидроцилиндре 14 регулируется степенью открытия соленоидных гидроклапанов. 9 в зависимости от скорости движения трактора при помощи управляемого выпрямителя. При отсутствий возмущающих воздействий или при равенстве сигналов датчика и задатчйка () выходное напряжение выпрямителя управляется непосредственно задатчиком (сигналом скорости движения трактора - . В качестве задатчикасигнала служит тахогенератЬр, который приводится во вращение от коробки переменных передач, в случае возникновения возмущакадих воздействий сигнал ± bXi р ё истрируется путем вычитания сигнал аскорости движения TR Kтора (задатчика) от сигнала угловой скорости оси поворота (датчика). В кач:есТВе последнего служит индукционный преобразоёатель. Управление осуществляе сясйгналами Uy+AU. В результате чего поддерживается постоянство принудительных отклонений задних и передних колес агрегатгг от заданной траектории.
Обеспечение необходимого направле ййя и разворота трактора .осуществляётйй nojBCipOTOM полуцилиндрического элемента 2 при помощи рулевой колон-, ки 19 или программирующим механизмом 21. Например, при повороте влево замыкается левый контакт Л1 (фиг. 2) с. правым контактом П1 , оси поворота
5 1
С последующим размыканием Л1 и замыканием левого контакта Л2 с контактом П1 , При этом сначала срабатывает левое плечо поляризованного реле Р, а затем левое плечо р , размыкая нормально закрытые рД (фиг. 3) и замыкая нормально открытые Рдр-контакты. В результате чего ранее замкнутое левое промежуточное реле Л разомкнется, а реле л срабатывается, замыкая контакт 1л (фиг. 3) и контакт 2л (фиг. 4).. Таким образом, в левую полость гидроцилиндра поступает от гидр насоса масло под большим.давлением, обеспечивающим необходимое направление и разворот трактора.
Расчетные отклонения агрегата от заданной траектории состабляют±0,5см что соответствует 25% от среднеквадратического отклонения траектории движения агрегата, отвечающего условиям агротехнических требований.
Формула изобретения
1.Способ управления движением. колесных тракторов , включающий поворот направляющих колес при появлении сигнала рассогласования с заданным направлением движения, отличающ и и с я тем, что, с целью повышения точности во-я дения при повороте напргюляющих колес, последним сообщают принудительное реверсивно-вращательное движение с угловой скоростью, пропорциональной скорости поступательного движения трактора.
2.Устройство для осуществления способа управления по п. 1, включающее датчик, пусковую аппаратуру, золотник , силовой цилиндр, нулевую колонку, связанную с осью поворота направляющих колес, и гидроклапаны, о тличающееся тем, что, с целью упрощения автоматического вождения , устройство снабжено полуцилиндрическим элементом с установленными на нем четырьмя контактами, двумя поляризованными реле, связанными с контактами полуцилиндрического элемента, соленоидными гидроклапанами, управляемым выпрямителем и программирующим механизмом, при этом полуцилиндрический элемент кинематически связан с программирующим механизмом с одной стороны и с рулевой колонкой с другой, а на оси поворота направляющих колес трактора симметрично его продольной оси установлены два .контакта, взаимодействующие с контактами каждого поляризованного реле, причем поляризованные реле соединены через пусковую аппаратуру с обмотками соленоидных гидр Ьклапанов , которые электрически связаны с управляемым выпрямителем.
3 Устройство по п. 2, отличающееся тем, что, с целью регулирования степени открытия золотника, управляемый выпрямитель снабжец датчиком индукционного типа и задатчиком,связанными через схему вычитания друг с другом, при этом зада тчик посредством сравнивающего и усилительного элементов подключен к выпрямителю, а датчик электрически соединен с осью поворота направляющих колес.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 178197, кл. А 01 В 69/04, 1965.
2.Авторское свидетельство СССР № 576089, кл. А 01 В 69/04, 1975.
прототип .
MZ.2
Tv , /-v шгл
..гл f . 2ff
782730 HW
Фиг. 3
роггЧ rn
.nl n - f 1 mJ

| название | год | авторы | номер документа |
|---|---|---|---|
| САМОНАСТРАИВАЕМАЯ АВТОНОМНАЯ СИСТЕМА ДЛЯ ПОВЫШЕНИЯ ЭКСПЛУАТАЦИОННЫХ СВОЙСТВ ДВУХЗВЕННОГО ТЯГОВО-ЭНЕРГЕТИЧЕСКОГО СРЕДСТВА | 1992 |
|
RU2006406C1 |
| Система рулевого управления транспортного средства | 1989 |
|
SU1622213A1 |
| Объемный гидропривод рулевого управления транспортного средства | 1984 |
|
SU1180291A1 |
| Рулевое управление транспортного средства | 1984 |
|
SU1217709A1 |
| УСТАНОВКА ДЛЯ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ АГРЕГАТОВ ГИДРОУСИЛИТЕЛЯ РУЛЕВОГО УПРАВЛЕНИЯ МАШИН | 2009 |
|
RU2415310C1 |
| Гидравлическая система рулевого управления транспортного средства | 1982 |
|
SU1134451A1 |
| Система рулевого управления автопоезда | 1987 |
|
SU1474016A1 |
| Гидравлическое рулевое управление транспортного средства | 1989 |
|
SU1613375A1 |
| Транспортное средство | 1988 |
|
SU1614947A1 |
| Система автоматического вождения тракторного агрегата на склонах | 1985 |
|
SU1391519A1 |