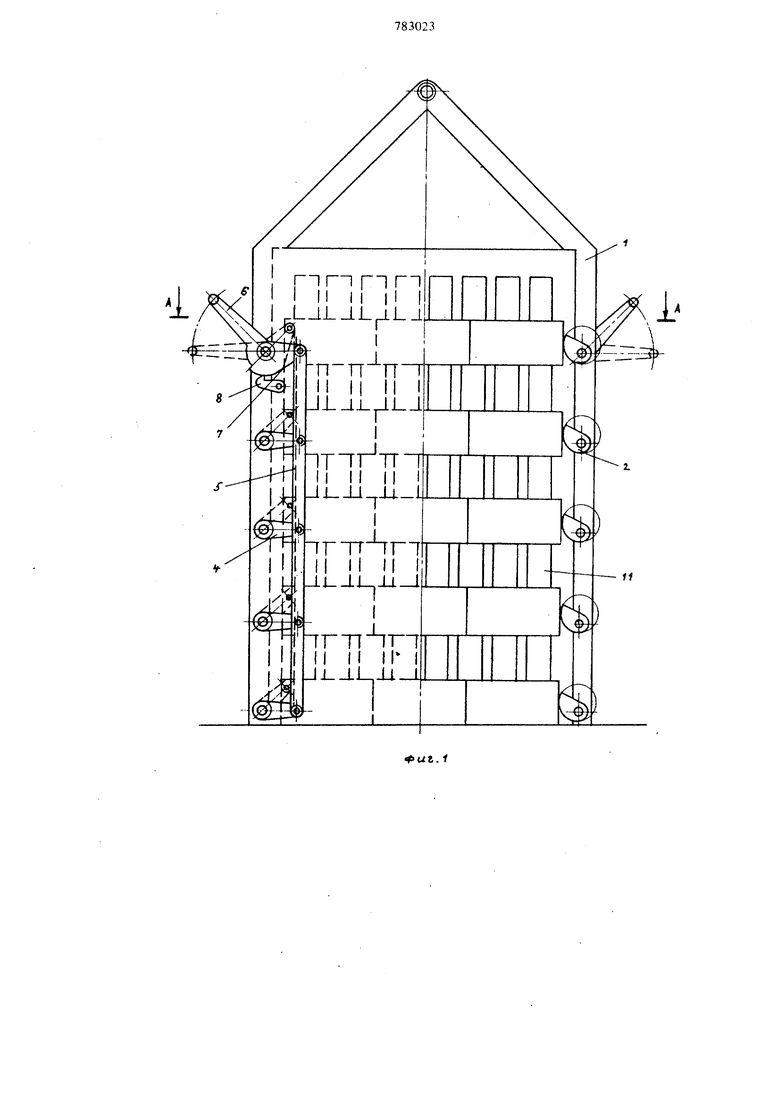
Изобретение относится к механизации погр ки и транспортирования штабелей кирпича и штучных грузов и может быть использовано в строительстве, промышленности строительных материалов и на транспорте. Известен грейферный захват для съема штабеля кирпича, подвешенный на крюке мос тового крана и представляющий собой две подвижные боковые рамы-щеки, имеющие на нижней горизонтальной части сплошной ряд металлических клиньев с пружинами, при под еме захвата щеки сдвигаются и зажимают клиньями нижний ряд штабеля (1 . Недостатком конструкции этого захвата яв ляется то, что нарушается перевязка, вследствие чего кирпичи транспортируют навалом, что увеличивает процент боя. Известен также захват для бесподдонного транспортирования пакетов кирпича, включающий корпус и компенсирующую подушку из съемного протекторного кольца пневматической шины для грузовой автомашины, прикреп ленного к корпусу с помощью болтов 2. Штабель в захвате удерживается путем сжатия нижнего ряда кирпичей зажимными болтами. Недостатками данного захвата являются большое усилие сжатия, необходимое для удержания штабеля при подъеме, а также невозможность равномерного распределения усилия сжатия вследствие колебаний размеров кирпичей в штабеле. Цель изобретения - повышение надежности работы захвата. Указанная цель достигается тем, что зажимные устройства выполнены в виде секций зажимов, состоящих из эксцентриков, шарнирно закрепленных на осях, попарно расположенныхс противоположных сторон рамы в несколько рядов по высоте захвата контейнера и соединенных тягами, связанными с рычагами управления, при этом рычаги управления вьшолнены с храповым механизмом. На фиг. 1 представлен предлагаемый захватконтейнер, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2.
Предлагаемый захват-контейнер состоит из корпуса 1, секций зажимов, состоящих из эксцентриков 2, шарнирно закрепленных на общих осях 3, расположенных попарно с противоположных сторон в несколько рядов по высоте захвата контейнера, Оси 3 посредством рычажков 4 и тяг 5 связаны с рычагами 6 управления. Рычаги 6 управления при повороте удерживаются храповиками 7 с собачками 8 Вращение от оси 3 к эксцентрику 2 передается через винт 9, конец которого входит в паз 10 на оси 3.
Длиной паза 10 обеспечивается люфт, необходимый для самоустанавливаемости эксцентриков 2 при зажиме кирпичей.
Захват-контейнер работает следующим образом.
При помощи любого грузоподъемного устройства захват-контейнер опускается сверху на подготовленный штабель кирпичей. При этом за счет наличия люфта в соединениях эксцентриков (кулачков) 2 с осями 3 кулачки отклоняются и свободно проходят мимо кирпичей.
При подъеме захвата- контейнера эксцентрик под действием собственного веса или пружин, а также сил сцепления их рабочей поверхности с поверхностью кирпичей 1 поворачиваются и заклинивают кирпичи. При этом зажим каждой отдельной секции кирпичей происходит независимо от остальных, что повышает надежность работы захвата.
Зажатый щтабель переносится и устанавливается в транспортное средство.
Поскольку захват выполнен в виде контейнера, охватывающего штабель кирпичей со всех сторон, в нем же можно и перевозить кирпиэд, не нарушая цельности штабеля.
Для освобождения штабеля необходимо повернуть рычаги 6 из положения I в положение и зафиксировать их в этом положении собачкой 8. Рдаов менно оси 3 поворачиваются и вьтодят эксцентрики 2 из зацепления с кирпичами 11. После этого захват-контейнер поднимают и снимают со штабеля.
Такое устройство позволяет рассредоточить зажимное усилие равномерно на каждую секцию кирпичей в штабеле и значительно уменьшить его величину, поскольку зажимное усилие в каждой секции возникает только от действия ее собственного веса. Колебания размеров кирпичей в данном случае также не оказывают отрицательного влияния, так как зажимные эксцентрики самоустанавливаются индивидуально против каждой секции.
Таким образом, предлагаемый захват-контейнер обеспечивает надежный захват штабеля кирпича и равномерное распределение эажимно го усилия на каждую секцию кирпичей в штабеле.
Формула изобретения
1- Захват-контейнер для штабеля кирпича, содержащий корпус в виде рамы и зажимные устройства, отличающийся тем, что с целью повышения надежности работы, зажимные устройства выполнены в виде секций зажимов, состоящих из эксцентриков, шарнирно закрепленных на осях, попарно расположенных с противоположных сторон рамы в несколько рядов по высоте захвата контейнера и соединенных тягами, связанными с рычагами управления.
2. Захват-контейнер по п. 1, о т л и ч аю щ и и с я тем, что рычаги управления выполнены с храповым механизмом. Источники информации, принятые во внимание при экспертизе
1.Роговой М. И. и др. Оборудование для комплексной механизации производства стеновой керамики. М., Машиностроение, 1964, с. 170-171, фиг. 100.
2.Авторское свидетельство СССР № 321391 кл. В 28 В 13/00, 1979.
fiut.i
. 2.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая линия формирования садки кирпича на печной вагонетке | 1983 |
|
SU1178604A1 |
| ЗАХВАТ ДЛЯ ШТАБЕЛЯ КИРПИЧА | 1992 |
|
RU2037411C1 |
| Ручная трехколесная тележка | 1950 |
|
SU93068A1 |
| ГРУППОВОЙ ЗАХВАТ | 2000 |
|
RU2169074C1 |
| Машина для штабелевки свежеотформованных керамических и силикатных изделий, принимаемых от прессов | 1959 |
|
SU126044A1 |
| Автомат для садки кирпича на печные вагонетки | 1978 |
|
SU766864A1 |
| Способ садки кирпича на обжиговые вагонетки и установка для его осуществления | 1983 |
|
SU1143598A1 |
| Групповой захват для кирпича | 1987 |
|
SU1470533A1 |
| Устройство для садки кирпича на печную вагонетку | 1973 |
|
SU531742A1 |
| Захватное устройство для пакетов кирпича | 1979 |
|
SU787175A1 |