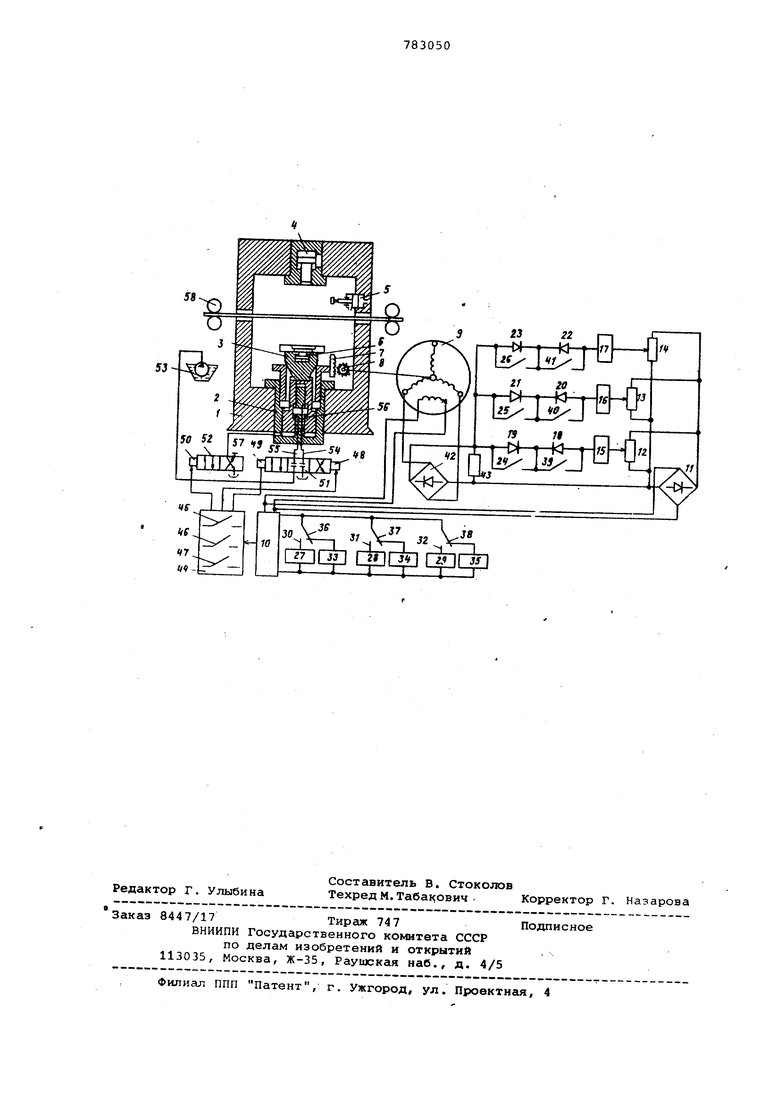
положения 9, установлены разделитель ные ячейки, выполненные в вцце диодов 18-23, иопарно включенных встречно-последовательно . Параллельно диодам 19, 21, 23 подсоединены выходы 24, 25, 26 релей ных элементов 27, 28, 29 соответственно. Входы этих релейных элементо соединены с блоком питания 10 посредством прямых выходов 30, 31, 32 компараторов 15, 16, 17. Входы релей ных элементов 33, 34, 35 соединены с блоком питания 10 посредством инвер сных выходов 36, 37; 38 компараторов 13, 16, 17. Параллельно диодам,18, 20, 22 подсоединены выходы 39, 40, 41 релейных элементов 33, 34, 35. ; Аноды диодов 19, 21, 23 соединены с:положительной шиной выпрямителя 42 установленного на выходе датчика пол:ожения 9 . Отрицательные шины выпря1«а1телей 11 и 42 объединены. Параллел но выпрямителю 42 подключен резистор 4-3 . Блок управления- 44 соединен с блоком питания 10. В блоке 44 в соот ветствующих цепях установлены контак ты 45, 46, 47 релейшлх элементов 27, 28, 29. На схеме показаны только замыкающие контакты релейных элементов, но могут использоваться и размыкающие, и число их может быть любым. Релейные элементы 27-29, 33-35 использова ны для размножения выходов компараторов 15, 16, 17. В случае применения компараторов с достаточным количеством выходов релейные элементы можно не использовать. Выходы блока управления 44 соединены с электромагнитами 48, 49, 50 гидрораспределителей 51 и 52. Посред ством гидрораспределителя 51 гидропр вод 53 подсоединяется либо к магистрали 54, либо к магистрали 55 цилинд ра ус.коренного перемещения 56. Гидро распределитель 52 позволяет соединить гидропривод 53 с магистралью 57 гидроцилиндра 2 ползуна 3. Для того, чтобы не затемнять чертеж, распределительная аппаратура, обеспечивающая работу гидроцилиндров прижима 4, механической руки 5 и противоприжима 6 на чертеже не показана. Не показан также привод полосоподавателя 58, обеспечивающего подачу полосы в зону вырубки. Устройство работает следующим образом. До подачи питания к датчику 9 и задатчикам 12,. 13, 14 контакты 30, 31, 32 компараторов 15, 16, 17 соответственно разомкнуты, а контакты 36, 37, 38 этих же компараторов замкнуты. Такое состояние выходов компа раторов соответствует превышению величины напряжения задатчиков нац величиной напряжения на выходе датчика. При таком состоянии выходов компараторов протекание тока по входиым цепям компараторов возможно только в направлении от датчика к задатчикам, так как релейные элементы 27, 28, 29 отключены и соответственно разомкнуты их контакты 24, 25, 26 и диоды 19, 21, 23 препятствуют протеканию тока в направлении от задатчиков 12, 13, 14 к датчику 9. 8то же время диоды 18, 20, 22 зашунтированы замкнутыми контактами 39,40, 41 включенных релейных эле- ментов 33, 34, 35 соответствен-но и не препятствует протеканию через компараторы 15, 16, 17 тока в направлении от датчика 9 к задатчикам 12, 13, 14. Если ползун 3 находится в самом нижнем положении, то на выходе датчика положения 9 получается наибольшее напряжение . Это достигается тем, что перед соедине -;ием вала датчика положения 9 с шестерней 8 при крайнем нижнем положении ползуна 3, вал датчика устанавливается в такое положение, при котором на его выходе имеется наибольшее заданное напряжение. Передаточное отношение пары рей- .ка 7 - шестерня 8 выбирается таким образом, чтобы при совершении ползуном полного хода вал датчика положения 9повернулся на угол не более 60 , что, 3 случае применения в качестве датчика положения сельсина, обеспечивает практически линейную зависимость меледу углом поворота вала датчика и напряжением на его выходе. В случае применения вместо сельсина датчика другого типа передаточное отношение может быть выбрано другим. Напряжения, устанавливаем1з1е на выходе задатчиков 12, 13 и 14, не могут быть больше напряжения на выходе датчика 9 в при крайнем нижнем положении ползуна 3. Благодаря этому, при подаче питания к датчику 9 и задатчикз 12, 13 и 14 по входным цепям компараторов 15, 16, 17 протекает ток в направлении от датчика 9 к задатчикам 12, 13, 14. Компараторы 15, 16, 17 за счет протекания упомянутого тока переходят в такое состояние, при котором их прямые выходы 30, 31, 32 замыкаются, а инверсные выходы 36, 37, 38 размыкаются. Релейные элементы 27, 28, 29 включаются, а релейные элементы 33, 34, 35 отключаются. Соответственно замыкаются контакты 24, 25, 26 рвлейных элементов 27, 28, 29 и размыкаются контакты 39, 40,41 релейных элементов 33, 34, 35. Теперь состояние выходов компараторов 15, 16, 17 соответствует превышению величины напряжения на выходе датчика 9 нар, величиной напряжения на выходе каждого из задатчиков 12, 13, 14 и ток в цепях, соединяющих компараторы с датчиком не протекает, так как протеканию тока от датчика к згщатчикам препятствуют диоды 18, 20, 22, а ток в направлении от задатчиков к датчику не может протекать, так как напряжение на выходе датчика выше, чем на выходе каждого из задатчиков. После того, как в блоке управления 44 формируется команда, на начало движения ползуна 3 ускоренно вверх, включается электромагнит 48 гидрораспределит-ёля 51 и рабочая жидкость от насоса гидропривода 53 поступает do магистрали 54 в цилиндр 56 ускоренного перемещения.
Под действием рабочей жидкости ползун 3 движется ускоренно вверх. Напряжение на выходе датчика 9 начинает уменьшаться. Если на задатчике 13 установлено напряжение, соответствующее точке перехода ползуна на рабочую скорость, то ползун 3 в ходе своего ускоренного движения вверх достигнет положения, при котором напряжение на выходе задатчика 9 станет меньше, чем напряжение, установленное на задатчике 13. По цепи задатчик 23 - компаратор 16 - диод 20 - замкнутый контакт 25 релейного элемента 28 - резистор 43 - отрицательная шина выпрямителя 11 протечет ток. В результате этого компаратор 16 переключится в такое состояние, при котором его контакты 31 размыкаются, а контакты 37 размыкаются. Релейный элемент28 теряет питание, его замыкающие контакты 48, установленные в соответствующих цепях блока управления 44 размыкаются, благодаря чему электромагнит 48 отклюается, гидрораспределитель 51 разъединяет магистраль 54 и нагнетательную полость насоса гидропривода 53, размыкающие контакты релейного элемента 28, установленные в соответствуюих цепях блока управления 44 замыкаются, благодаря чему в блоке управления вырабатывается сигнал, поступающий на электромагнит 50 гидрораспределителя 52. Гидрораспределитель 52 подсоединяет магистраль 57 гидроцилиндра 2 к нагнетательной полости насоса гидропривода 53. Ползун 3 на рабочей скорости продолжает движение 9верх и осуществляет вырубку изделия из,полосы. Кроме описанных выше переключений в блоке управления 44 релейный элемент 28 размыкает свой контакт 25, установленный параллельно диоду 21, а релейный элемент 34 замыкает свой контакт 40, установленный параллельно диоду 20. Таким образом, сразу после срабатывания компаратора 16 ток в цепи датчик 9 задатчик 13 прекращается. Действиельно, в рассматриваемый момент вреени напряжение на задатчике 13 вые, чем на выходе датчикА 9, и ток
т датчика к задатчику протекать не ожет, в то же время.протеканию тока т задатчика к датчику препятствует
диод 21, т.е. тока в рассматриваемой цепи нет.
Так как ползун на рабочей скорости продолжает движение вверх, напряжение на выходе датчика 9 продолжает . уменьшаться. Пусть, например, на эадатчике 14 установлено напряжение, соответствующее крайнему aepxHeNy положению ползуна 3. При ходе ползуна в крайнее верхнее поЛожение напряжение на выходе задатчика 14 оказы0вается несколько больше напряжения на выходе датчика 9 и по цепи задатчик 14 - компаратор 17 - диод 22 замкнутый контакт 26 релейного элемента 29 - резистор 43 - отрицательная
5 шина выпрямителя 11 протекает ток, благодаря протеканию которого срабатывает компаратор 17 и переключается в такое состояние, при котором его замыкающий контакт 32 размыкается, а размыкающий контакт 38 зат- кается.
0 Контакты 47 релейного элемента 29, установленные в соответствующих цепях блока управления 44 переключаются, в результате чего в блоке управления 44 вьфабатывается сигнал на
5 отключение электромагнита 50 и включение электромагнита 49. Магистрсшь 57 отсоединяетсяОТ нагнетательной полости насоса гидропривода 53, а магистраль 55 соединяется. Начинает0ся ускоренное опускание ползуна 3. Благодаря тому, что контакт 25 релейного элемента 29 разомкнулся, а контакт 41 релейного элемента 35 замкнулся, протекание тока в цепи за5датчик 14 - датчик 9 прекратится, так как протеканию тока от задатчика к датчику препятствует диод 23, а от датчика к задатчику ток не протекает потому, что напряжение на выходе задатчика выше, чем на выходе
0 датчика.
По мере движения ползуна 3 вниз напряжение на выходе датчика 9 увеличивается. Когда это напряжение станет выше напряжения на выходе за5датчика 14 по цепи датчик 9 - диод 23 - замкнутый контакт 41 релейного элемента 35 - компаратор 17 - задатчик 14 протечет ток. Компаратор 17 переключится, замкнет свои контакты
0 32 и разомкнет контакты 38. Релейный элемент 29 включится, а релейный элемент 35 - отключится.
Благодаря этому, сразу после переключения компаратора 17 ток в це5пи датчик 9 - задатчик 14 прекратится . Таким образом введение в цепи, соединяющие датчик с компараторами, разделительных ячеек в виде ьстречнопоследовательно соединенных диодов,
О параллельно одним из которых подсоединены прямые выходы компараторов, а параллельно другим - инверсные выходы тех же компараторов, обеспечивает нагружение датчика в каждый данный момент времени не более чем
5
на один компаратор, при условии, что расстояние между двумя соседними точками по .пути перемещения рабочего органа, ,в которых нужно получить команды больше зоны нечувствительности компаратора. Это условие при высокой чувствительности компараторов практически всегда выполнимо.
При дальнейшем движении ползуна 3 вниз напряжение на выходе датчика 9 станет выше, чем напряжение на выходе задатчика 13. В цепи компаратора ;16 произойдут переключения, аналогиные описанным выше для компаратора 1
Движение ползуна 3 вниз прекратит:Ся после того, как напряжение на выходе датчика 9 станет выше напряжени на выходе задатчика 12, при этом ;компаратор 15 переключится. Это промизойдет в момент достижения ползу:ном крайнего нижнего положения. В результате переключения компаратора 15 произойдет включение релейного ;элемента 27 и отключение релейного ;элемента 33, благодаря чему электрома нит 49 потеряет питание. Полость 55 будет отсоединена от нагнетательной полости насоса гидропривода 53. Ползун остановится в крайнем нижнем положении.
Показаны только три задатчика и три компаратора. Практически количество задатчиков и компараторов, которые можно подключить к выходу Датчика 9, неограниченно. В частности, для пресса для чистовой вырубки по ходу движения ползуна 3 помимо рассмотренных команд необходимо получить команды для своевременного управления цилиндрами прижима 6 , противоприжима 4, механической руки 5 и полосоподавателем 58.
В устройстве .в каждый момент времени датчик 9 нагружен не более, чем на один компаратор. Это позволяет осуществлять изменение одной из точек срабатывания без изменения точности срабатывания компараторов в
других точках. Этим упрощается настройка и перенастройка многопозиционного устройства, так как отпадает необходимость при перенастройке одной из точек срабатывания для сохранения точности срабатывания в других точках осуществлять поднастройку задатчиков, определяющих срабатывание в этих точках.
Положительный эффект от внедрения
устройства достигс1ется путем упроще- .
ния процесса настройки и перенастройки многопозиционного устройства управления, благодаря исключению взаимного влияния компараторов, а также путем повышения точности и стабильности работы.
Формула изобретения Многопозиционное устройство для
дистанционного управления гидравлическим прессом, содержащее соединенные между собой блоки управления и питания, соединенный с последним датчик положения рабочего органа пресса, подключенный к компараторам с прямыми и инверсными выходами, и соединенные с блоком управления электромагниты исполнительных механизмов, отличающееся тем, что, с целью повышения точности и стабильности, а также улучшения условий обслуживания, оно снабжено включенными между датчиком и компараторами разделительными ячейками в количестве, равном числу компараторов, каждая из которых
выполнена в виде двух встречно-последовательно включенных диодов, при этом параллельно одному из диодов подсоединен прямой выход, а параллельно другому - инверсный выход соответствующего компаратора.
Источники информации, принятые во внимание при экспертизе 1. Патент США № 33411 3,
кл. В 21 J 13/08, 1973.
53 C TTOfTVif. LTZLN N 1ЛП1-,Л 3 CfDC 5гз гг г-i I I tX H-l47 J 1 -t-f-Pf- -№ UJ -bxrcr fт Zx 
| название | год | авторы | номер документа |
|---|---|---|---|
| Многопозиционное устройство для дистанционного управления гидравлическим прессом | 1981 |
|
SU1002172A2 |
| Устройство для управления транспортным средством | 1986 |
|
SU1402452A1 |
| Устройство управления тормозом шахтной подъемной машины | 1989 |
|
SU1676981A1 |
| Электропривод подъемной машины | 1985 |
|
SU1339852A1 |
| Устройство для связи двух энергосистем | 1987 |
|
SU1504720A1 |
| Устройство для управления тяговым электроприводом постоянного тока транспортного средства | 1984 |
|
SU1270039A1 |
| Устройство для оптимизации фотосинтеза растений | 1989 |
|
SU1690611A1 |
| Способ управления гидравлическим прессом и устройство для его осуществления | 1989 |
|
SU1682211A1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ УТЕЧКИ ТОКА НА КОРПУС ТРОЛЛЕЙБУСА | 1997 |
|
RU2128348C1 |
| Электропривод постоянного тока | 1984 |
|
SU1239820A1 |