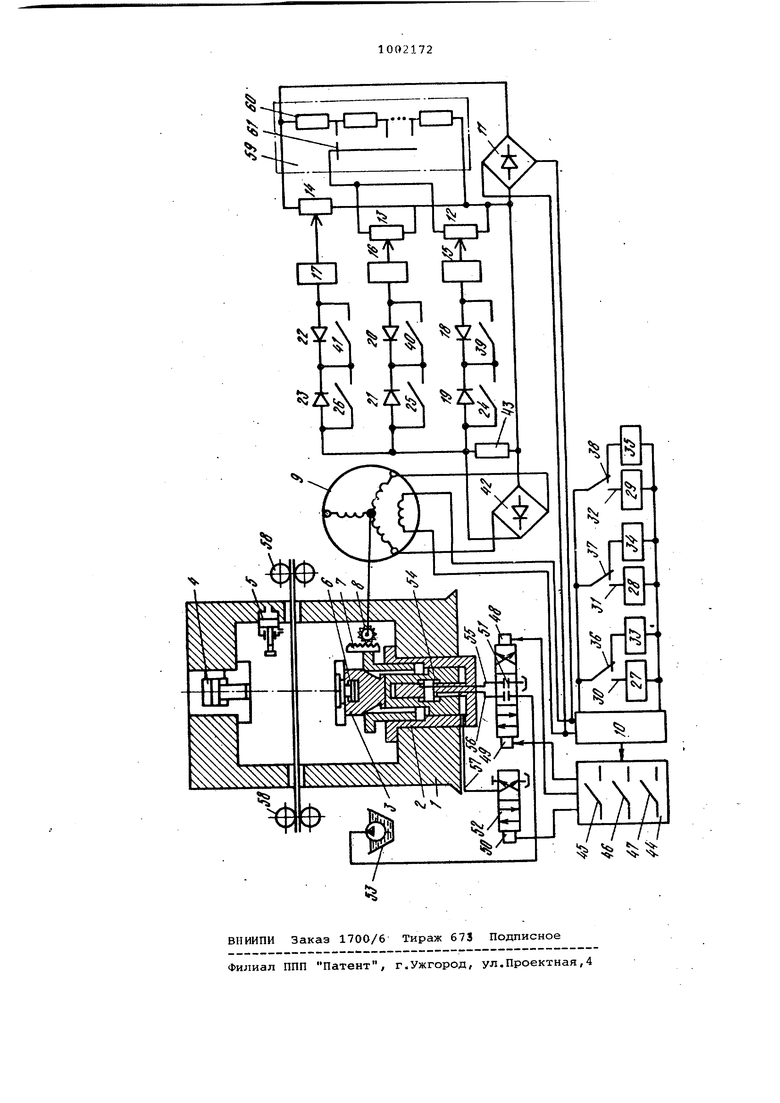
Изобретение относится к области машиностроения, в частности к конструкции систем управления оборудованием для обработки давлением. Из основного, изобретения по авт.е 783050 известно многопозиционное устройство для дистанционного управления гидравлическим прессом, содерЖсицее соединенные между собой блоки питания и управления, выпрямитель, датчик положения рабочего органа пресса, подключенный-к компараторам с пряь«лми и инверсными выходами, электромагниты исполнительных механизмов, а также разделительные ячейки, выполненные в виде двух встречно последовательно включенных диодов. Недостаток известного устрюйства заключается в том, что при изменении толщины заготовки необходимо произво дить перестройку нескольких точек срабатывания устройства при помощи индивидуальных задатчиков каждого компаратора, что затрудняет эксплуа тацию пресса и может быть причиной ошибочной настройки. Цель изобретения - улучшение ус ловий эксплуатации. Дня этого многопозиционное устройство Д.ПЯ дистанционного управления гидравлическуим прессом по авт.св. 783050 снабжено общим для всех компараторов программным задатчиком коррекции срабатывания по толщине заготовки , соединенным своими входами с выпрямителем, а выходами - с задатчиками компараторов, при этом программный задатчик выполнен в виде последовательно соединенных резисторов, коммутируемых многопозиционным переключателем. На чертеже изображена функциональная схема устройства. i В качестве примера вьтолнения показано устройство управления гидравлическим прессом для чистовой вырубки. На станине 1 укреплены гидроцилиндры 2 ползуна 3, а также гидроцилиндры 4 противоприжима и механической руки 5. Гидроцилиндр 6 прижима смонтирован в ползуне 3, на котором укреплена зубчатая рейка 7, взаимодействующая с шестерней 8. Вал датчика 9 положения соединен с шестерней -8. В качествеДатчика 9 положения применен бесконтактный сельсин (может использоваться и датчик любого другого типа). Блок 10 питания осуществляет питание датчика 9 положения и соединен с выпрямителем 11. Выходы задатчиков 12-14 соединены соответственно, с компараторами 15-17, в качестве которых могут быть применены поляризованные реле или элементы лю бого другого типа (в том числе и бе (контактные), В цепях, соединяющих каждый из компараторов 15-17 с датчиком 9 положения, установлены разделительные ячейки, вьшолненные в виде диодов 18-23, включенных попарно встречнопоследо ватель но. Параллельно диодам 19, 21, 23 под соединены выходы 24-26 релейных элементов 27-29 соответственно. Входы этих релейных элементов соединены с блоком 10 питания посредством выходо 30-32 компараторов 15-17. Входы релейных элементов 33-35 соединены q блоком 10 питания посредством инверс тзх выходов 36-38 компараторов 15-17 Параллельно диодам 18, 20, 22 подсое динены выходы 39-41 релейных элементов 33-35. Аноды диодов 19, 21,23 соединены: с положительной шиной выпрямителя 42, установленного на выходе датчика 9 положения. Отрицатель ные шины выпрямителей 11 и 42 объе,динены. Параллельно выпрямителю 42 подключен резистор 43. Блок 44 управ Ленин соединен с блоком 10 питания. Тз блоке 44 в соответствующих цепях установлены контакты 45-47 релейных элементов 27-29. На чертеже показаны только заьыкающие контакты релейных элементов, но могут использоваться и развалкаинцие и число их может быть больше. Релейные элементы 27, 28, 29, 33, 34, 35 использованы для размножения выходов компараторов 15-17. В случае применения компараторов с достаточным количеством выходов релейные элементы можно йе применять. Выходы блока 44 управления соединены с электромагнитами 48-50 гидрораспределителей 51 и 52. Посредством гидрораспределителя 51 гидропривод 53 подсоединяется к цилиндру 54 ускоренного перемещения либо через магистраль 55, либо через магистраль 56 Гидрораспределитель 52 позволяет сое динить гидропривод 53 с магистралью 57 гидроцилиндра 2 ползуна 3. С помощью специального привода полосоподаватель 58 обеспечивает подачу поло сы в зону вырубки.. Питание на задатчик 14 подается .от выпрямителя 11 непосредственно, а на задатчики 12 и 13 - через програм мный задатчик 59 коррекции срабатывания по толщине, смещающий точки срабатывания. В качестве программного задатчика 59 использован набор по следоват ьно соединенных резисторов 60, переключаемых посредством многопозиционного переключателя 61; Каждо му положению переключателя 61 соответствует напряжение, обеспечивающее пропорциональное смещение точек срабатывания, Зсщаваемых задатчиками 12 и 13, необходимое для обработки на прессе заготовки соответствующей толщины. На табло переключателя, относи тельно которого перемещается рукоятка переключателя, против каждого ее фиксированного положения указаны толщины заготовок (из ряда стандартных толщин заготовок), подлежащих обработке на данном конкретном прессе. Устройство работает следующим образом. До подачи питания к датчику 9 и задатчикам 12-14 выходы (контакты) 30-32 компараторов 15-17 соответственно разомкнуты, а инверсные выходы (контакты) 36-38 этих же компараторов замкнуты. Такое состояние выходов компараторов соответствует превышению величины напряжения задатчиков над величиной напряжения на выходе датчика. При таком состоянии выходов компараторов протекание тока по входным цепям компараторов возможно только в направлении от датчика к задатчикам, так как релейные элементы 2729 отключены и соответственно разомкнуты их выходы (контакты) 24-26 и диоды 19, 21, 23 препятствуют протеканию тока в направлении от задатчиков 12-14 к датчику 9. В то же время диоды 18, 20, 22 зашунтированы выходами (замкнутыми контактами) 39-41 включенных релейных элементов 33-35 соответственно и не препятствуют протеканию через компараторы 15-17 тока в направлении от датчика 9 к задатчикам 12-14 и программному задатчику59. Если ползун 3 находится в самом нижнем положении, то на выходе датчика 9 положения напряжение наибольшее . Это достигается тем, что перед соединением вала датчика 9 положения с шестерней 8 при крайнем нижнем положении ползуна 3 вал датчика устанавливается в такое положение, при котором на его выходе имеется наибольшее заданное напряжение. Передаточное отношение пары рейка 7 - шестерня 8 выбирается таким образом, чтобы при совеЕХиении ползуном полного хода вал датчика 9 положения повернулся на угол не более 60, что в случае применения в качестве датчика положения сельсина обеспечивает практически линейную зависимость между углом поворота вала датчика и напряжением на его выходе. В случае применения вместо сельсина датчика другого типа передаточное отношение может быть выбрано другим. Напряжения, устанавливаемые на задатчиков 12-14, не могут быть больше напряжения на выходе дат чика 9 при крайнем нижнем положении ползуна 3. Благодаря этому при подаче питани к датчику 9 и задатчикам 12-14 с про граммным задатчиком 59 по входным цепям компараторов 15-17 протекает ток в направлении от датчика 9 к за1датчикам 12-14 с программным задатчи ком 59. Компараторы 15-17 за счет про текания упомянутого тока переходят в такое состояние, при котором их прямые выходы (контакты) 30-32 замыкаются, а инверсные выходы (контакты) 36-38 размыкаются. Релейные элементы 27-29 включаются, а релейные элементы 33-35 отключаются. Соот ветственно замыкаются выходы (контак ты) 24-26 релейных элементов 27-29 и размыкаются выходы (контакты) 39-4 релейных элементов 33-35. Теперь сое тояние выходов компараторов 15-17 соответствует превыиению величины на пряжения на выходе датчика 9 над величиной напряжения на выходе каждого из задатчиков 12-14 и ток в цепях соединяющих компараторы с датчиком, не протекает, так как протеканию .тока от датчика к задатчикам препятствуют диоды 18, 2.0, 22, а ток в направлении от задатчиков к датчику не может протекать, так как напряжение на выходе дат-1ика 9 выше, чем-на выходе каждого из задатчиков. После того, как в блоке 44 управления формируется команда на начало движения ползуна 3 ускоренно вверх, включается электромагнит 48 гидрораспределителя 51, и рабочая жидкость от насосасгидропривода 53 поступает по магистрали 55 в цилиндр 54 ускоренного перемещения. Под действием рабочей жидкости ползун 3 движется ускорен но вверх. Напряжение на выходе датчика 9 начинает уменьшаться. Если, например, на задатчике 13 установлено напряжение, соответствую щее точке перехода ползуна на рабочую скорость, то ползун 3 в ходе сво его ускоренного движения вверх достигнет положения, npiP котором на.пряжение на выходе датчика 9 станет меньше, чем напряжение, установленно на задатчике 13. По цепи задатчик 59 - задатчик 13 - компаратор 16 диод 20 - замкнутый контакт 25 релей ного элемента 28 - резистор 43 - отрицательная шина выпрямителя. 11 протечет ток. В результате этого компаратор .16 переключится в такое состоя ние, при котором его контакты 31 раз мыкаются, а выход контакта 37 замыка ются. Релейный элемент 23 теряет питание, его замыкающие контакты 46, .установленные в соответствующих цепя .блока .44 управления, раз1 ыкаются, благодаря чему электромагнит 48 отключается, гидрораспределитель 51 разъединяет магистраль 55 и нагнетательную полость насоса гидропривода 53, размыкающие контакты релейного элемента 28, установленные в соответствующих цепях бЛока 44 управления, замыкаются, благодаря чему в этом блоке вырабатывается сигнал, поступающий на электромагнит 50 гидрораспреелителя 52. Гидрораспределитель 52 подсоединяет магистраль 57 гидррцилиндра 2 к нагнетательной полости насоса гидропривода 53. Ползун 3 на рабочей скорости продолжает движение вверх и осуществляет кырубку изделия из полосы. Кроме описанных вьдше переключений в блоке 44 управления релейный элемент 28 размыкает свой контакт 25, установленный параллельно диоду 21, :а релейный элемент 34 замьлкает свой контакт 40, установленный параллельно диоду 20. Таким образом, сразу после срабатывания компаратора 16 ток в цепи датчик 9 - задатчик 13 прекращается,, поскольку в этот момент времени напряжение на задатчике 13 выше, чем на выходе датчика 9, и ток от датчика к задатчику протекать не может, в то же время протеканию тока от задатчика к датчику препятствует диод 21. Так как ползун на рабочей .скорости продолжает движение вверх, напряжение на выходе датчика 9 продолжает уменьшаться. Если, например, на задатчике 14. установлено напряжение, соответствующее крайнему верхнему положению ползуна 3, то при подходе ползуна в крайнее верхнее положение напряжение на выходе задатчика 14 оказывается несколько больше напряжения на выходе датчика 9 и по цепи задатчик 14 компаратор 17 .. - диод 22 - замкнутый контакт 26 релейного элемента 29 - резистор 43 отрицательная шина выпрямителя 11 протекает ток, что вызывает срабатывание компаратора 17, при котором его выход (замыкающий контакт) 3.2 pasivbJKasTCH, а выход (размыкающий контакт) 38 замыкается. Контакты 47 релейного элемента 29, установленные в соответствующих цепях блока 44 управления, переключаются, в результате чего в этом блоке вырабатывается сигнал на отключение электромагнита 50 и включение электромагнита 49. Магистраль 57 отсоединяется от нагнетательной полости гидропривода 53, а магистраль 56 соединяется. . Начинается ускоренное опускание ползуна 3.. Благодаря тому, что контакт 26 релейного элемента 29 разомкнулся, а контакт 41 релейного элеменjra 35 замкнулся, протекание тока в цепи задатчик 14 - датчик 9 прекра.тится, так как протеканию тока от эа датчика к датчику препятствует диод 23, а от датчика к задатчику ток не протекает потому, что напряжение на выходе задатчика вьше, чем на выходе датчика, По мере движения ползуна 3 вниз напряжение на выходе датчика 9 увели чивается. Когда это напряжение стане (выше, чем на выходе задатчика 14, по цепи датчик 9 - диод 23 - замкнутый контакт 41 релейного элемента 35 компаратор 17 - задатчик 14 возникнет ток. Компаратор 17 переключится, замкнет свои контакты 32 и разомкнет контакты 38, Релейный элемент 29 включится, а релейный элемент 35 отключится , Таким образом, введение в цепи, соединяющие датчик с компараторах ш, разделительных ячеек в виде встречно-последовательно соединенных диодов, параллельно одним из которых подсоединены прямые выходы компараторов, а параллельно другим - инверс ные выходы тех же компараторов, обес печивает нагружение датчика в каждый данный момент времени не более, чем на один компаратор, при условии, что расстояние между двумя соседними точками пути перемещения рабочего органа, в которых нужно получить команды, больше зоны нечувствительности компаратора. Это условие при достаточно высокой чувствительности ком параторов практически всегда выполнимо. Благодаря этому сразу после переключения компаратора 17 т8к в цепи датчик 9 - задатчик 14 прекратится. Рукоятка переключателя может также перемещаться и автоматически {от сер вопривода) по заранее Зсщанной программе изменения толщины заготовок, подлежащих обработке. В этом случае изменение напряжения ,обеспечивающего пропорциональной смещение то.чёк ерабатывания, может быть не дискретным, а непрерывным. При дальнейшем движении ползуна 3 вниз напряжение на выходе датчика 9 станет выше, чем напряжение на выходе задатчика 13, В цепи компаратора 16 произойдут переключения, опи санные выше для компаратора 17. Движение ползуна 3 вниз прекратит сяпосле того, как напряжение на выходе датчика 9 станет выше напряжени на выходе задатчика 12, при этом ком паратор переключится. Это произойдет в момент достижения ползуном крайнего нижнего положения. В результате переключения компаратора 15 произойдст включение релейного элемента 27 и отключение релейного элемента 33, благодаря чему электромагнит 49 потеряет питание. Магистраль 56 будет отсоединена от нагнетательной полости насоса гидропривода 53. Ползун остановится в-крс1йнем нижнем положении. Хотя на чертеже показаны только три задатчика 12-14 и три компаратора 15-17, практически их количество неограничено. В-частности, в прессе для чистовой вырубки по ходу движе,ия ползуна 3, помимо рассмотренных команд, аналогичным образом получа ются и команды для своевременного управления цилиндрами прижима 6 и противоприжима 4, механической руки 5 и полосоподавателем 58. То, что в данном многопозиционном устройстве в каждый данный момент времени датчик 9 нагружен не более, чем на один компаратор, позволяет осуществить изменение одной из точек срабатывания без изменения точности срабатывания компараторов в других точках. Таким образом упрощается настройка и переналадка многопозиционного устройства, так как отпадает необходимость осуществлять поднастройку задатчиков, определяющих срабатывание в этих точках. При изменении толщины заготовки осуществляется смещение точек срабатывания компараторов, обусловленное разностью напряжений. (Смещение срабатывания осуществляется переключателем 61 задатчика 59 толщины заготовки. Эффективность использования устройства, достигается за счет упрощения переналадки его, а следовательно, улучшения условий обслуживания и исключения ошибочной настройки точек срабатывания. Формула изобретения Многопозиционное устройство для дистанционного управления гидравлическим прессом по авт,св, № 783050, отличающееся тем, что, с целью улучшения условий эксплуатации , оно снабжено общим для вЪех компараторов программным задатчиком коррекции срабатывания по толщине заготовки, соединенным своими входами с выпрямителем, а выходами - с задатчиками компараторов, при этом программный задатчик выполнен в виде послеовательно соединенных резисторов, KOMAiyтируемых многопозиционным переключателем.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многопозиционное устройство для дистанционного управления гидравлическим прессом | 1979 |
|
SU783050A1 |
| Устройство для управления коробкой передач трактора | 1972 |
|
SU481470A1 |
| Сварочный полуавтомат | 1990 |
|
SU1754362A1 |
| Способ управления гидравлическим прессом и устройство для его осуществления | 1989 |
|
SU1682211A1 |
| Устройство для автоматического управления механизированным стеллажом | 1987 |
|
SU1452774A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЕРВОПРИВОД | 1992 |
|
RU2072544C1 |
| Пневматическое устройство управления многоприводным агрегатом | 1986 |
|
SU1355776A1 |
| Устройство для контроля исправности релейной защиты | 1987 |
|
SU1654895A1 |
| Устройство для контроля исправности релейной защиты | 1988 |
|
SU1561054A1 |
| Устройство для автоматического управления коробкой передач | 1976 |
|
SU597586A1 |