Изобретение относится к машиностроению, в частности к оборудованию для обработки металлов давлением, и может быть использовано в системах управления прессового оборудования с гидравлическим приводом.
Цель изобретения - повышение производительности и то1- -ости работы пресса.
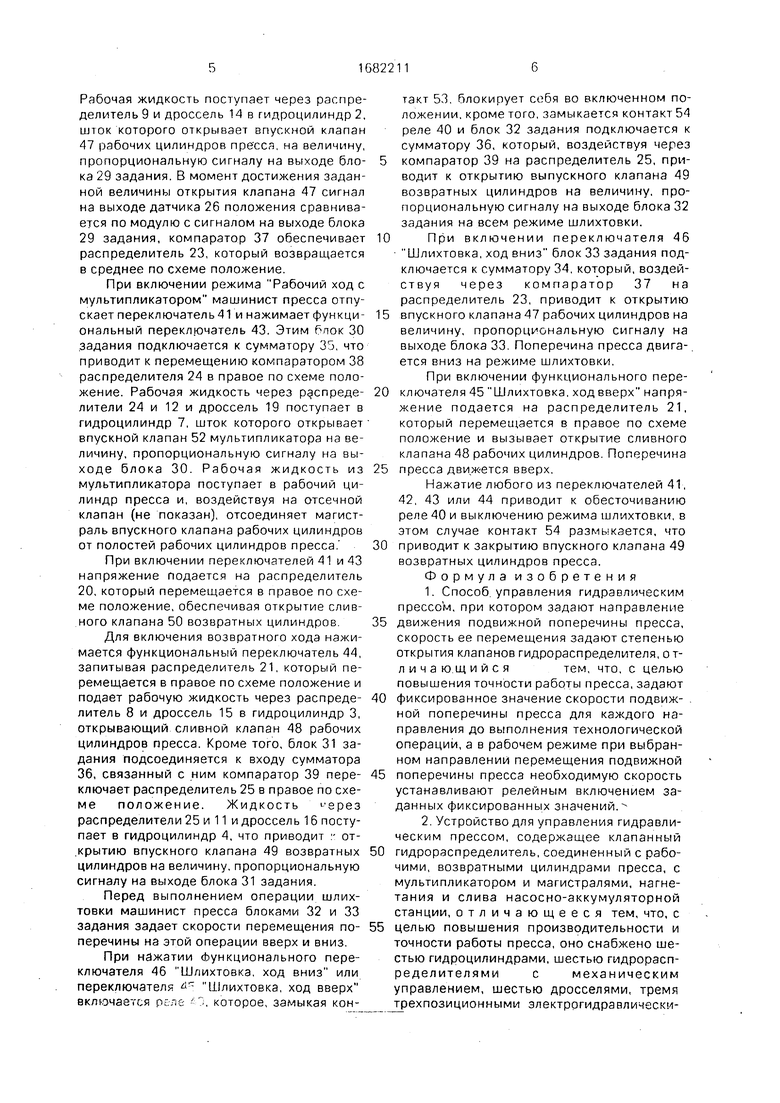
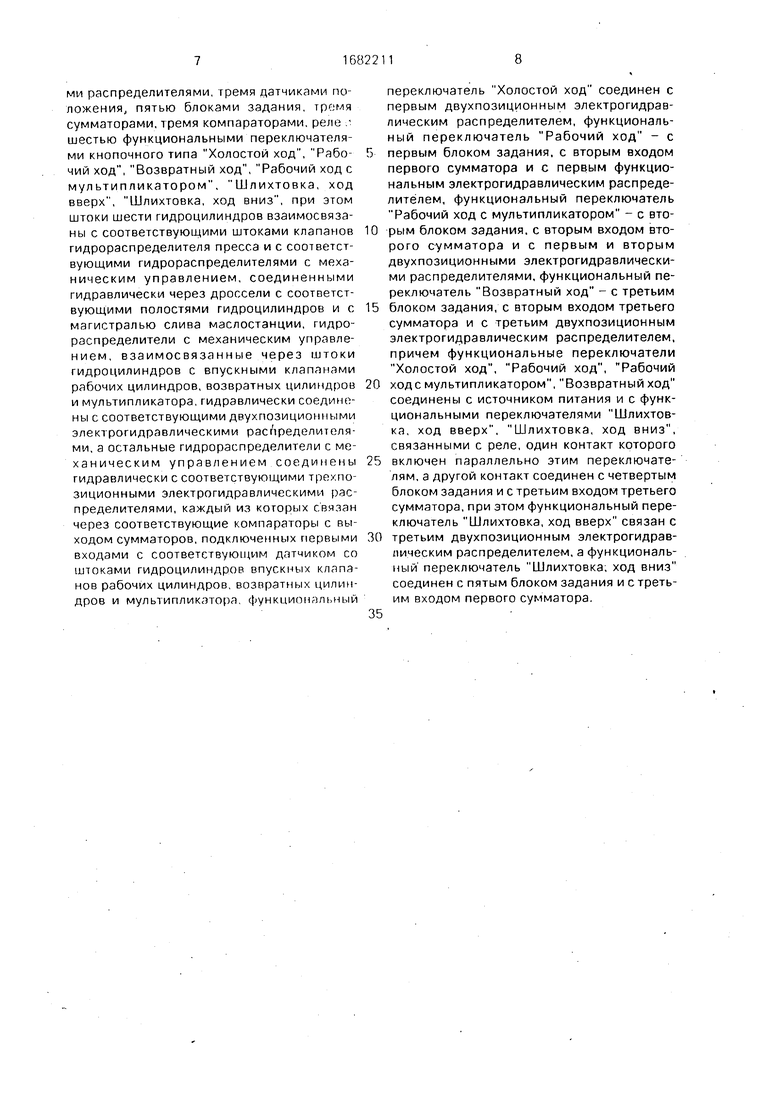
На чертеже представлена схема устройства для управления гидравлическим прессом.
Устройство содержит клапанный гидрораспределитель 1, соединенный с рабочими, возвратными цилиндрами пресса, с мультипликатором и магистралями нагнетания и слива насосно-аккумуляторной станции,гидроцилиндры2-7
гидрораспределители 8-13 с механическим управлением, дроссели 14-19, двухпозици- онные электрогидравлические распределители 20- 22, трехпозиционные электрогидравлические распределители 23-25, датчики 26-28 положения, блоки 29- 33 задания, сумматоры 34-36, компараторы 37-39, реле 40, функциональные переключатели 41-46 кнопочного типа. Штоки гидроцилиндров 2-7 взаимодействуют соответственно со штоками клапанов 47-52 и гидрораспределителями 8-13, соединенными гидравлически соответственно через дроссели 15, 14, 17, 16, 19 и 18 с гидроцилиндрами 3, 2, 5, 4, 7 и 6 и магистралью слива маслостанции. Гидрораспределители 8, 10 и 13 гидравлически соединены с двух- позиционными электрогидравлическими распределителями 21, 20 и 22, а гидрораспределители 9, 11 и 12 соединены с трехпо- зиционными электрогидравлическими распределителями 23, 25 и 24, каждый из которых связан соответственно через компараторы 37, 39 и 38 с сумматорами 34, 36 и 35, соединенными соответственно с датчиками 26-28 положения, связанными соответственно со штоками гидроцилиндров 2, 4 и 6,
Функциональный переключатель 42 Холостой ход соединен с распределителем 20. Функциональный переключатель 41 Рабочий ход соединен с блоком 29 задания, с сумматором 34, с распределителем
20.Функциональный переключатель 43 Рабочий ход с мультипликатором соединен с блоком 30 задания, сумматором 35, распределителями 20 и 22.
Функциональный переключатель 44 Возвратный ход соединен с блоком 31 задания, сумматором 36 и распределителем
21,причем функциональные переключатели 41-44 соединены с источником питания и функциональными переключателями Шлихтовка, ход вверх 45 и Шлихтовка, ход вниз 46, которые электрически связаны с реле 40. Один контакт 53 реле 40 включен параллельно переключателям 45 и 46, а другой контакт 54 соединен с блоком 32 задания и сумматором 36. Функциональный переключатель 45 связан с распределителем 21, а функциональный переключатель 46 соединен с блоком 33 задания и сумматором 34.
Способ осуществляют следующим образом.
Рассмотрим режим шлихтовки. Перед выполнением этой операции машинист пресса устанавливает необходимые скорости перемещения поперечины пресса вверх и вниз по экспериментальным либо справочным данным, используя аналоговые входы. После подачи под пресс поковки машинист пресса нажимает функциональную клавишу Ход на шлихтовке вниз. Происходит открытие на максимальную величину и блокировка в этом положении на всем режиме шлихтовки впускного клапана возвратных цилиндров пресса. Кроме того, открывается впускной клапан рабочих ци0 линдров пресса на величину, заданную перед выполнением шлихтовки по аналоговому входу, чем достигается необходимая скорость движения поперечины. При достижении заданного размера поковки ма5 шинист пресса отпускает клавишу Ход на шлихтовке вниз и нажимает клавишу Ход на шлихтовке вверх. Закрывается впускной клапан рабочих цилиндров и открывается сливной клапан рабочих цилиндров на за0 данную величину. Поперечина пресса движется вверх. Далее процесс повторяется.
Этим уменьшается время перехода пресса с одного режима работы на другой, значительно уменьшается необходимое уп5 реждение на передачу команды на перемещение поперечины вверх для получения заданного размера поковки, снижается утомляемость машиниста, что позволяет повысить производительность и точность ра0 боты пресса.
Устройство работает следующим образом.
Режим ковки. Перед выполнением тех5 нологической операции например, протяжки) машинист пресса блоками задания 29, 31 и 30 устанавливает максимальные скорости движения поперечины пресса на рабочем, возвратном ходе, и на рабочем ходе с
0 включением мультипликатора. Для включения холостого хода машинист пресса нажимает функциональный переключатель 42, напряжение подается на распределитель 20, который перемещается в правое по схе5 ме положение, подавая жидкость через рас- пределитель 10 и дроссель 17 в гидроцилиндр 5, шток которого открывает сливной клапан 50 возвратных цилиндров пресса. Поперечина пресса опускается,
0 жидкость в рабочие цилиндры попадает через наполнительно-сливной клапан из бака (не показаны).
При касании бойком поковки машинист пресса отпускает переключатель 42 и нажи5 мает функциональный переключатель 41 включения рабочего хода. При этом на вход сумматора 34 дополнительно с датчиком-26 положения подключается блок 29 задания. Суммарный сигнал поступает на вход компаратора 37, который перемещает распре- делитель 23 в правое по схеме положение.
Рабочая жидкость поступает через распределитель 9 и дроссель 14 в гидроцилиндр 2, шток которого открывает впускной клапан 47 рабочих цилиндров пресся, на величину, пропорциональную сигналу на выходе блока 29 задания. В момент достижения заданной величины открытия клапана 47 сигнал на выходе датчика 26 положения сравнивается по модулю с сигналом на выходе блока 29 задания, компаратор 37 обеспечивает распределитель 23, который возвращается в среднее по схеме положение.
При включении режима Рабочий ход с мультипликатором машинист пресса отпускает переключатель 41 и нажимает функциональный переключатель 43. Этим блок 30 задания подключается к сумматору 35, что приводит к перемещению компаратором 38 распределителя 24 в правое по схеме положение. Рабочая жидкость через распределители 24 и 12 и дроссель 19 поступает в гидроцилиндр 7, шток которого открывает впускной клапан 52 мультипликатора на величину, пропорциональную сигналу на выходе блока 30. Рабочая жидкость из мультипликатора поступает в рабочий цилиндр пресса и, воздействуя на отсечной клапан (не показан), отсоединяет магистраль впускного клапана рабочих цилиндров от полостей рабочих цилиндров пресса
При включении переключателей 41 и 43 напряжение подается на распределитель 20, который перемещается в правое по схеме положение, обеспечивая открытие сливного клапана 50 возвратных цилиндров
Для включения возвратного хода нажимается функциональный переключатель 44, запитывая распределитель 21, который перемещается в правое по схеме положение и подает рабочую жидкость через распределитель 8 и дроссель 15 в гидроцилиндр 3, открывающий сливной клапан 48 рабочих цилиндров пресса. Кроме того, блок 31 задания подсоединяется к входу сумматора 36, связанный с ним компаратор 39 переключает распределитель 25 в правое по схеме положение. Жидкость 1 ерез распределители 25 и 11 и дроссель 16 поступает в гидроцилиндр 4, что приводит - открытию впускного клапана 49 возвратных цилиндров на величину, пропорциональную сигналу на выходе блока 31 задания.
Перед выполнением операции шлихтовки машинист пресса блоками 32 и 33 задания задает скорости перемещения поперечины нз этой операции вверх и вниз.
При нажатии Функционального переключателя 46 Шлихтовка, ход вниз или переключателя Шлихтовка, ход вверх включается р.. л с , которое, замыкая контакт 53 блокирует себя во включенном положении, кроме того, замыкается контакт 54 реле 40 и блок 32 задания подключается к сумматору 36, который, воздействуя через 5 компаратор 39 на распределитель 25, приводит к открытию выпускного клапана 49 возвратных цилиндров на величину, пропорциональную сигналу на выходе блока 32 задания на всем режиме шлихтовки. 10При включении переключателя 46
Шлихтовка, ход вниз блок 33 задания подключается к сумматору 34, который, воздействуя через компаратор 37 на распределитель 23, приводит к открытию 5 впускного клапана 47 рабочих цилиндров на величину, пропорциональную сигналу на выходе блока 33 Поперечина пресса двигается вниз на режиме шлихтовки.
При включении функционального пере- 0 ключателя 45 Шлихтовка, ход вверх напряжение подается на распределитель 21, который перемещается в правое по схеме положение и вызывает открытие сливного клапана 48 рабочих цилиндров Поперечина 5 пресса движется вверх.
Нажатие любого из переключателей 41, 42, 43 или 44 приводит к обесточиванию реле 40 и выключению режима шлихтовки, в этом случае контакт 54 размыкается, что 0 приводит к закрытию впускного клапана 49 возвратных цилиндров пресса.
Формула изобретения 1. Способ управления гидравлическим прессом, при котором задают направление 5 движения подвижной поперечины пресса, скорость ее перемещения задают степенью открытия клапанов гидрораспределителя, о т- личающийсятем, что, с целью
повышения точности работы пресса, задают 0 фиксированное значение скорости подвижной поперечины пресса для каждого направления до выполнения технологической операции, а в рабочем режиме при выбранном направлении перемещения подвижной 5 поперечины пресса необходимую скорость устанавливают релейным включением заданных фиксированных значений.
2 Устройство для управления гидравлическим прессом, содержащее клапанный 0 гидрорзспределитель, соединенный с рабочими, возвратными цилиндрами пресса, с мультипликатором и магистралями, нагнетания и слива насосно-аккумуляторной станции, отличающееся тем, что, с 5 целью повышения производительности и точности работы пресса, оно снабжено шестью гидроцилиндрами, шестью гидрораспределителями с механическим управлением, шестью дросселями, тремя трехпозиционными электрогидравлическими распределителями, тремя датчиками положения, пятью блоками задания, тромя сумматорами, тремя компараторами, реле шестью функциональными переключателями кнопочного типа Холостой ход, Рабочий ход, Возвратный ход, Рабочий ход с мультипликатором, Шлихтовка, ход вверх, Шлихтовка, ход вниз, при этом штоки шести гидроцилиндров взаимосвязаны с соответствующими штоками клапанов гидрораспределителя пресса и с соответствующими гидрораспределителями с механическим управлением, соединенными гидравлически через дроссели с соответствующими полостями гидроцилиндров и с магистралью слива маслостанции, гидрораспределители с механическим управлением, взаимосвязанные через штоки гидроцилиндров с впускными клапанами рабочих цилиндров, возвратных цилиндров и мультипликатора, гидравлически соединены с соответствующими двух.позиционными элект рогидравлическими распределителями, а остальные гидрораспределители с механическим управлением соединены гидравлически с соответствующими трохпо- зиционными электрогидравлическими распределителями, каждый из которых связан через соответствующие компараторы с выходом сумматоров, подключенных первыми входами с соответствующим датчиком со штоками гидроцилиндров впускных клапанов рабочих цилиндров, возвратных цилиндров и мультипликатора функциональный
переключатель Холостой ход соединен с первым двухпозиционным электрогидравлическим распределителем, функциональный переключатель Рабочий ход - с
первым блоком задания, с вторым входом первого сумматора и с первым функциональным электрогидравлическим распределителем, функциональный переключатель Рабочий ход с мультипликатором - с вторым блоком задания, с вторым входом второго сумматора и с первым и вторым двухпозиционными электрогидравлическими распределителями, функциональный переключатель Возвратный ход - с третьим
блоком задания, с вторым входом третьего сумматора и с третьим двухпозиционным электрогидравлическим распределителем, причем функциональные переключатели Холостой ход, Рабочий ход, Рабочий
ход с мультипликатором, Возвратный ход соединены с источником питания и с функциональными переключателями Шлихтовка, ход вверх, Шлихтовка, ход вниз, связанными с реле, один контакт которого
включен параллельно этим переключателям, а другой контакт соединен с четвертым блоком задания и с третьим входом третьего сумматора, при этом функциональный переключатель Шлихтовка, ход вверх связан с
третьим двухпозиционным электрогидравлическим распределителем,а функциональный переключатель Шлихтовка, ход вниз соединен с пятым блоком задания и с третьим входом первого сумматора.
К рабочим К возвратным Кмультипли- цилиндрам цилиндрамкатару
| название | год | авторы | номер документа |
|---|---|---|---|
| Сервопривод клапанов гидрораспределителя гидравлического пресса | 1990 |
|
SU1810223A1 |
| Сервопривод управления валом гидрораспределителя гидравлического пресса | 1989 |
|
SU1726279A1 |
| Регулятор торможения поперечины гидравлического пресса | 1979 |
|
SU856860A1 |
| Система управления гидравлическим прессом | 1980 |
|
SU903212A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2002 |
|
RU2215911C1 |
| Гидропривод рабочего оборудования одноковшового экскаватора | 1982 |
|
SU1134679A1 |
| Система включения режимов работы гиравлического пресса | 1977 |
|
SU692740A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД МЕХАНИЗМА КАЧАНИЯ КРИСТАЛЛИЗАТОРА | 2001 |
|
RU2201842C2 |
| Установка для деформирования трубчатых заготовок | 1982 |
|
SU1065061A1 |
| СПОСОБ ВЗВОДА, РАЗГОНА И НАНЕСЕНИЯ УДАРА СНАРЯДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ ПРИ РАЗРУШЕНИИ РАЗЛИЧНЫХ МАТЕРИАЛОВ | 2005 |
|
RU2291298C2 |
Изобретение относится к машиностроению, в частности к оборудованию для обработки металлов давлением, и может быть использовано в системах управления прессового оборудования с гидравлическим приводом. Цель - повышение производительности и точности работы пресса. Способ управления включает задание направления движения и скорости перемещения подвижной поперечины пресса путем открытия клапанов гидрораспределителя на заданное фиксированное значение по экспериментальным либо справочным данным до выполнения технологической операции. В рабочем режиме при выбранном направлении движения устанавливают релейным включением заданную фиксированную скорость. Устройство для реализации способа содержит клапанный гидрораспределитель, соединенный с рабочими, возвратными цилиндрами пресса и мультипликатором, шесть гидроцилиндров, штоки которых связаны со штоками клапанов гидрораспределителя и с шестью гидрораспределителями с механическим управлением, связанными в свою очередь через дроссели с гидроцилиндрами. Устройство содержит по три двухпозиционных и трехпозиционных электрогидравлических распредел ,сля, три компаратора, три сумматора, три датчика положения штоков гидроцилиндров, пять блоков задания, реле и шесть функциональных переключателей режима работы пресса. Перед выполнением технологической операции устанавливают с задатчиков необходимые скорости перемещения поперечины. Команда на перемещение поперечины вверх или вниз подается логическим сигналом с функциональной клавиатуры. За счет применения электрогидравлических распределителей уменьшается упреждение, при котором подается команда на движение поперечины вверх, т.е. снижается постоянная времени системы управления прессом, которая не зависит от машиниста пресса 2. с.п.ф-лы, 1 ил. (Л о 00 ю кэ
| Система управления главным распределителем гидравлического пресса | 1978 |
|
SU673469A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
