Изобретение относится к транспорт ной технике, в частности к системам управления положением.платформы тран портного средства, например кузова автомобиля с регулируемой подвеской Известно автоматическое следящее устройство, например,-к самоходному комбайну для работы на склонах как в поперечном, так и в продольном направлениях, включающее в себя поперечный и продольный ртутные замыкатели, электромагниты, гидрораспре делитель и гидроцилиндры выравнивания в поперечном и продольном направлениях {Y} . Недостатками этого устройства йв ляется тс, что оно срабатывает лишь по достижении определенного угла наклонения комбайна (продольного и поперечного), что.нет ручного рег лирования положения комбайна по высоте и системы автоматического подд живания комбайна на установленной высоте. Нсшболеб близким к изобретению является устройство управления поло жением платформы транспортного сред ства, содержащее датчики поперечной и продольной стабилизации, связанные с инерционными элементами и раз мещенные на платформе, и датчики предельных отклонений платформы относительно заданного уровня, число которых равно числу регулируемых опор, включенные в цепь питания электромагнитов распределителя, соединенного с силовыми механизмами выравнивания 2 . Однако и это устройство обладает недостаточной чувствительностью и точностьнз. Цель изобретения - повышение чувствительности и точности работы. Это достигается тем, что устройство для управления положением платформы транспортного средства снабжено датчиками определения промежуточного положения платформы относительно заданного уровня, число которых равно числу регулируемых опор, и кшкдый из которых выполнен на двух переменных резисторах, образукадих два плеча одного из мостов, третье плечо которого выполнено на постоянном резисторе, датчики поперечной и продольной стабилизации выполнены также на переменных резисторах, первый из которых образует общее для всех мостов четвертое плечо, а второй включен последовательно с
ОДНИМ из переменных резисторов всех мостов датчиков определения промежуточного положения платформы относительно заданного уровня, причем в измерительную диагональ каждого из мостов включено поляризованное реле, контакты которого включены последовательно с датчиками предельных отклонений в цепи питания соотве ствукждих электромагнитов.
Кроме того, устройство снабжено ручным регулятором положения платФормы по высоте, выполненным на пе||)еменном резисторе, включенном в четвертое плечо каждого из мостов,
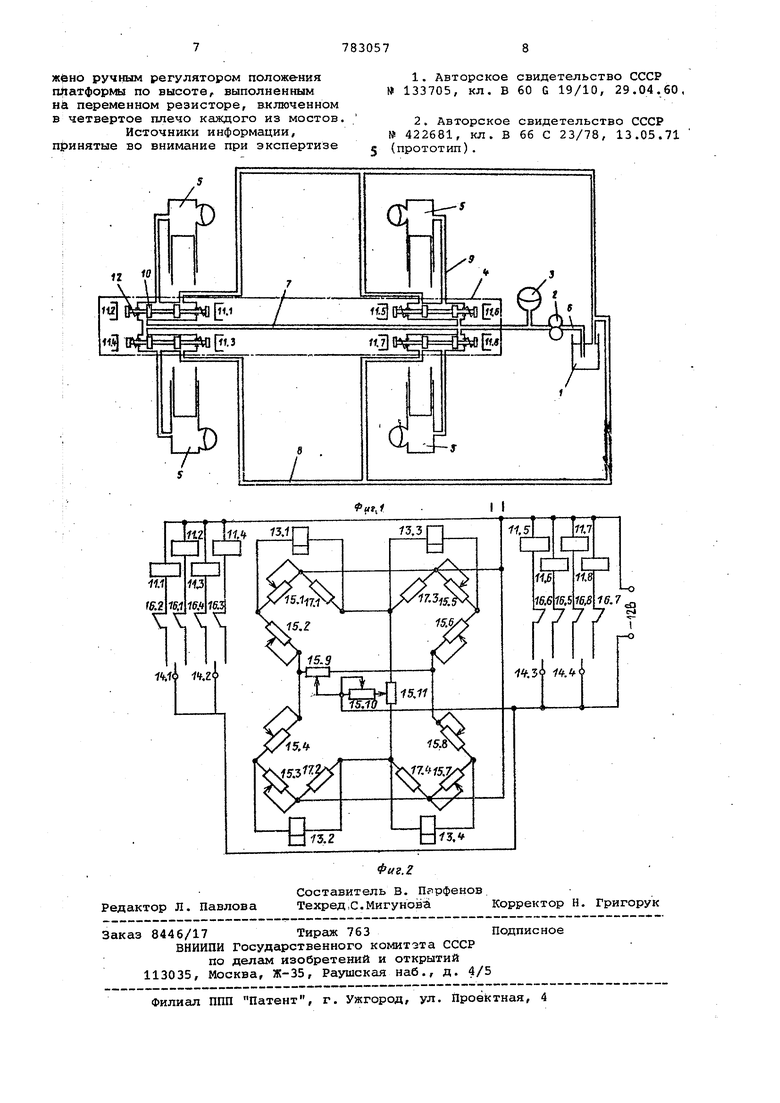
На фиг. 1 изображена гидравл чесKaS схема предлагаемого устройд ваг на; фиг. 2 - принципиальная электринеская схема устройства для управле|ния положением платформы транспортного средства.
Устройство выполнено применительно; к двухосному автомобилю, имеющему ре|гулнруемую подвеску, выполненную, на-пример, с гидропневматическими элементами. При этом регулирс вание положения кузова платформы осуществляется путем подачи или слива жидкости в надпоршневое пространCTJBO или из надпоршневого пространCTlBa гидропневматических рессор которые осуществляются гидрораспреде1литвлем.
Гидравлическая часть устройства содержит емкость 1 с маслом, маслонасос 2 с маслозаборником, гидроакк мулятор 30 гидрораспределитель 4, связанные с гидропневматическими . рессорами 5 и соединительные трубопроводы 6-9.Позицией б обозначен всасывающий трубопровод; позицией 7 напорный трубопровод; позицией 8 сливной трубопровод, позицией 9 трубопровод питания гидропневматических рессор. При этом две левые изображенные на схеме гидропневматическив рессоры 5 подрессоривают переднюю часть автомобиля, а две правые - заднюю. Гидрораспределител 4 содержит четыре золотника 10, управляемые при помощи электромагнитов 11.1-11.8. Золотники в нейтральном положении удерживаются пружинами 12. Каждый золотник регулирует количество рабочей жидкости в одной гидропиевматической рессоре, Пр срабатьшании электромагнитов 11,1, 11.3, 11.5, 11.7 происходит слив рабочей жидкости из гидропневматических рессор. При срабатывании электромагнитов 11.2, 11.4, 11.6, 11„8 происходит наполнение гидропневматических рессор жидкостью.
Электрическая часть устройства содержит четыре сбалансированных электрических моста сопротивлений. Запитанных от электрооборудования автомобиля, четыре поляризованных реле 13.1, 13.2, 13.3, 13.4, каждое
из которых включено в измерительную диагональ соответствуюдего электрического моста и имеет один контакт 14.1, 14.2, 14.3, 14.4 соответственно, нормально занимакхций нейтральное положение и переключаемый в ту или другую сторону в зависимости от упрнвляквдего воздействия поляризованного реле, и восемь электромагнитов 11Л, 11.2, 11.3, 11.4, 11.5, 11.6, 11.7, 11.8, управляющих гидрораспределителем ,
Датчики определения промежуточного положения платфорг«л относительно заданного уровня образованы пе;;: ременными резисторами 15.1 и 15.2, 15.3 и 15.4, 15,5 и 15.6, 15.7 и 15.8, которые расположены на подрессоренной части автомобиля, механически связаны с неподрессоренными частями, и величина каждого из них зависит от положения подрессоренных частей ав.томобиля относительно неподрассоренных. При этом каждая пара резисторов определяет положение соответствующего калеса автомобиля относительно подрессоренных частей . Резисторы 15.1 и 15.2 определяют положение правого переднего колеса, резиторы 15.3 и 15.4 - левого переднего, резисторы 15.5 и 15.6 - правого заднего, резисторы 15,7 и 15.8 - левого защнего. Сумма же сопротивлений каждои пары резисторов остается неизменной. Переменные резисторы 15,9, 15.10 и 15.11 являются общими для всех электрических мостов сопротивлений .
Резистор 15.9 является датчиком продольной стабилизации и служит для автоматического продольного регулирования положения кузова автомобиля. Ползунок резистора 15.9 связан кинематически с инерционным датчиком, который воспринимает продольные силы инерции, действуюдие на автомобиль при разгонах и торможениях, и отклонения кузова от горизонтешьг. ного положения в продольном направлении и установлен на подрессоренной части автомобиля.
Резистор 15.10 служит для ручного регулирования положения кузова по высоте.
Резистор 15.11 является датчиком поперечной стабилизации и служит для автоматического поперечного регулирования положения кузова автомобиля. Ползунок этого резистора связан кинематически с инерционным датчиком, который воспринимает боковые силы инерции, действующие на автомобиль на повороте, и отклонения кузова от горизонтального положения в поперечном направлении и установлен на подрессоренной части .автомобиля.
Датчики предельных отклонений платформы относительно заданного уроня выполнены на контактах 16.1 - 16. включены в цепь электромагнитов и служат для ограничения регулируекюго хода подвески. При чрезмерном удалении подрессоренных и неподреесореины частей автомобиля одной относительно другой контакты 16.1, 16.3, 16.5, 16.7 размыкают цепи питания электромагнитов 11.2, 11.4, 11,6, 11.8 и подача жидкости в гидропневматически рессоры прекращается. При чрезмерном сближении подрессоренных частей и неподрессоренных частей автомобиля контакты 16.2, 16.4, 16.6, 16.8 размыкают цепи питания электромагнитов 11.11, 11.3, 11.5, 11.7, и слив жидкости иэ гидропневматических рессор прекращается.
На фиг. 2 показаны также постоянные резисторы 17.1 - 17.4, включенные в плечи мостов. Для ручного подъема или опускания кузова водитель изменяет сопротивление резистора 15.10, что однополюсно разбалансирует все четыре электрических моста сопротивлений. При этом срабатывают поляризованные реле 13.1 - 13.4 и замыкаются соответствующие контакты, 1троизводя при этом зашТтку соответствующих электромагнитов 11.1, 11.3, 11.5, 11.7 или 11.2, 11.4, 11.6, 11.8, вызывая слив жидкости из гидропневматических рессор или их напол нение, тем самым осуществляя опускание или подъем кузова. Опускание или подъем кузова будет осуществляться до сбалансирования электрических мостов резисторами слежения .
После чего контакты реле размыкаю ся, обесточивая обмотки электромагнитов, золотники под действием пружин 12 занимают нейтральное положение, разобщая гидропневматические . рессоры с гидросистемой, и далее высота кузова автомобиля будет поддерживаться постоянной.
При действии на автомобиль поперечных сил (крен кузова, действие центробежных сил на повороте) ползунок резистора 15.11 будет смещаться в ту или иную сторону, вызывая разнополюсную разбалансировку электрических мостов левой и правой сторон, что вызывает в свою очередь соответствующую запитку электромагнитов и перемещение золотников гидрораспределителя, направляющих жидкость в гидропиевматические рессорл той стороны, куда накренился или шюжет накрениться кузов автомобили от деист ВИЯ це1 тробежных сил, и сливающих жидкость из гидропневматических рессор другой стороны до сб шаисировани электрические мостов резисторами слежения,
При действии на автомобиль продолных сил (рйэгон или торможение автомобиля, движение на подъем или на спуск) ползунок резистора 15.9
будет смещаться в ту или иную сторону, вызывая раэпополюскум ра:1Г1аллнсировку электрических MOCTOI передней и задней подвесок, что вы:и-шлет в свою очередь соответстную;иую :iannTку электромагнитов и перемете мне золотников гидрораспределителя, регулирующих количество рабочей жидкости в гидропневматических рессорах передней и задней подвесок автомобиля . При этом, если в передние
o гидропневматические рессоры будет подаваться жидкость, то из задних будет сливаться или наоборот.
Во всех случаях устройство противодействует внешней причине, вызвав5шей то или иное действие на -автомобиль .
Высокочастотные колебания колес, происходящие при езде по неровной дороге, устройством практически
0 восприниматься не будут вследствие некоторой инерционности срабатывания поляризованных реле и гидрораспределителя .
Формула изобретения
s
1. Устройство для управления положением платформы транспортного средства, содержащее датчики поперечной и продольной стабилизации,
0 связанные с инерционными элементами и размещенные на платформе, и датчики предельных отклонений платформы относительно заданного уровня, число которых равно числу регулиру5еьалх опор, включенные в цепь питания электромагнитов распределителя, соединенного с силовыми механизмами выравнивания, отличающееся тем, что, с целью повышения чувстви0тельности и точности работы, оно снабжено датчиками определения промежуточного положения платформы относительно заданного уровня, число которых равно числу регулируемых опор, и каждый из которых выполнен на двух
5 переменных резисторах, образукмих два плеча одного из мостов, третье плечо которого выполнено на постоянном резисторе, датчики поперечной и продольной стабилизации выполнены
0 также на переменных резисторах, первый из которых образует общее для всех мостов четвертое плечо, а второй включен последовательно с одним из переменных резисторов всех мостов
5 датчиков определения промежуточного положения платформы относительно заданного уровня, причем в измерительную диагональ каждого из мостов включено поляризованное реле, контакты которого включены последоваoтельно с датчиками предельных отклонений в цепи питания соответстлумцих электромагнитов.
2. Устройство по п. 1, о т л ичающееся тем, что оно сиас5
жёно ручным регулятором положения платформы по высоте г выполненным на переменном резисторе, в.ключенном в четвертое плечо каждого из мостов.
Источники информации, принятые во внимание при экспертизе
свидетельство СССР
60 G 19/10, 29.04.60.
свидетельство СССР
66 С 23/78, 13.05.71 
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО | 1990 |
|
RU2018453C1 |
| АНТИШОКОВАЯ ПОДВЕСКА | 2018 |
|
RU2676843C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ МЕХАНИЗМОМ ПЕРЕКЛЮЧЕНИЯ КОРОБКИ ПЕРЕДАЧ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2170678C1 |
| УСТРОЙСТВО СИГНАЛИЗАЦИИ НЕПОДВИЖНОГО СОСТОЯНИЯ ЭЛЕКТРОУТЮГА | 1992 |
|
RU2051473C1 |
| Подвеска колес автомобиля | 1978 |
|
SU1004159A1 |
| Устройство для измерения положения штриховых элементов | 1989 |
|
SU1714362A1 |
| ЗАЖИМ ДЛЯ КОЛПАЧКА ДЛЯ ИГЛЫ, КРЫШКА, АВТОМАТИЧЕСКОЕ ИНЪЕКЦИОННОЕ УСТРОЙСТВО И СПОСОБ ИЗГОТОВЛЕНИЯ ЗАЖИМА | 2016 |
|
RU2720160C2 |
| УСТРОЙСТВО ДЛЯ ПОПЕРЕЧНОЙ СТАБИЛИЗАЦИИ КУЗОВА САМОСВАЛЬНОГО ТРАНСПОРТНОГО СРЕДСТВА ПРИ ЗАДНЕЙ РАЗГРУЗКЕ | 2017 |
|
RU2679758C1 |
| Мост для измерения емкости и тангенса угла потерь конденсаторов | 1986 |
|
SU1318920A1 |
| Гидропневматическая независимая подвеска колесного модуля транспортного средства | 2017 |
|
RU2682943C1 |
