Изобретение относится к транспортному машиностроению, в частности к колесным подвижным транспоpтным средствам, имеющим грузовую платформу для размещения груза.
Известно транспортное средство, содержащее подрессоренную раму, подвеску с поперечным балансиром, которая имеет гидропневматические рессоры, датчики крена.
Недостаток такого транспортного средства - неустойчивость его при использовании в районах с холмистой местностью и крутыми склонами.
Сущность предложенного технического решения заключается в том, что транспортное средство, содержащее подрессоренную раму шасси, остов, грузовую платформу для размещения перевозимого груза, гидросистему, снабжено автоматической системой регулирования положением грузовой платформы, включающей в себя полость в остове ТС для размещения датчика загрузки, датчика крена, аналого-цифрового преобразователя, компаратора и усилителя. Грузовая платформа в нижней части связана с остовом горизонтальным продольным шарниром, ось вращения которого расположена вдоль грузовой платформы. Выходы датчиков соединены с входом аналогово-цифрового преобразователя. Выход аналого-цифрового преобразователя соединен с компаратором, выход которого соединен с усилителем, который связан с исполнительным механизмом привода грузовой платформы, включающего в себя два электромагнита для перемещения двухпозиционного золотника, работающего в двух режимах напора и слива, двух возвратных пружин, возвращающих золотник в исходное положение после завершения работы. В гидромагистрали находятся клапаны. Клапан обеспечивает беспрепятственный ход жидкости под давлением. Дроссель обеспечивает плавный сброс давления и слив жидкости в сливную емкость через перепускной клапан. Насос подключен к электрическому двигателю. Исполнительным элементом системы являются два домкрата, которые обеспечивают стабилизацию грузовой платформы.
Предложенная конструкция ТС содержит вспомогательную гидросистемы и тем самым не зависит от основной. Грузовая платформа связана с остовом продольным шарниром, к тому же грузовая платформа и остов имеют треугольную форму.
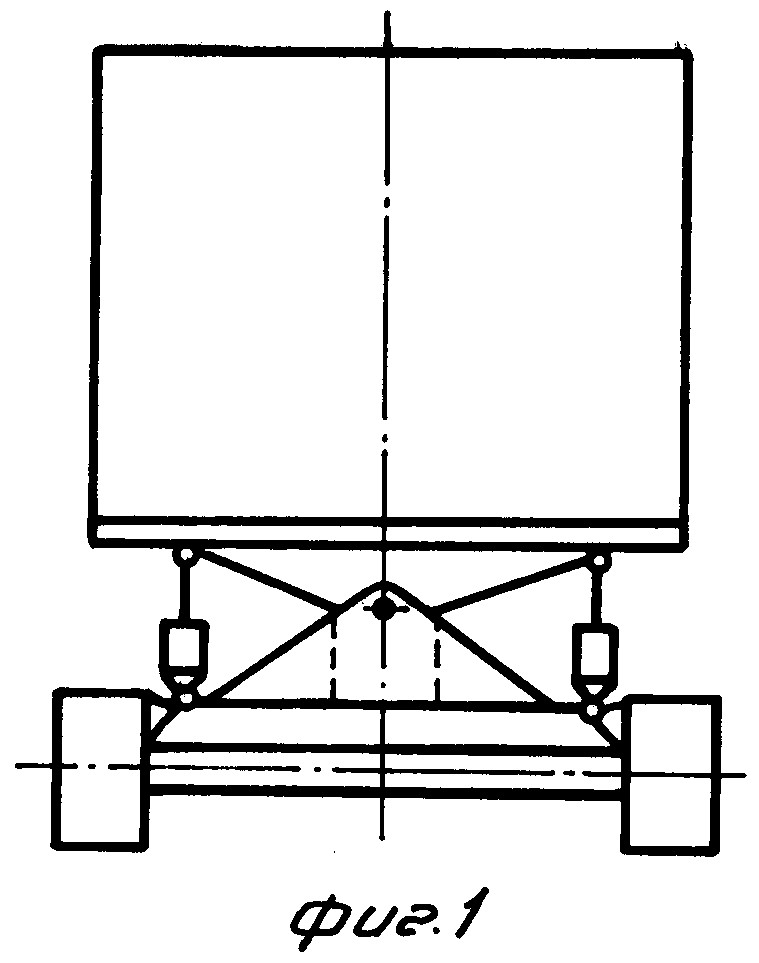
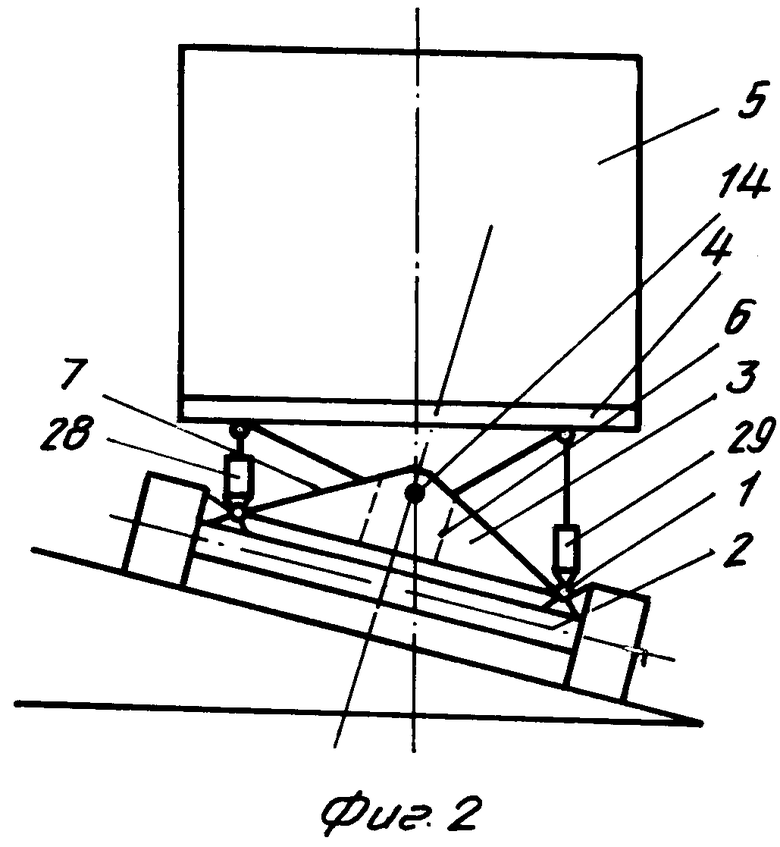
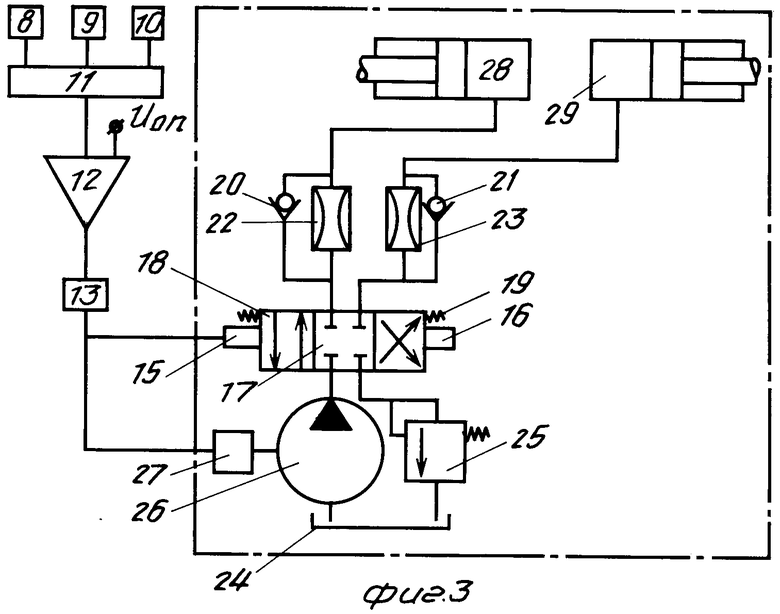
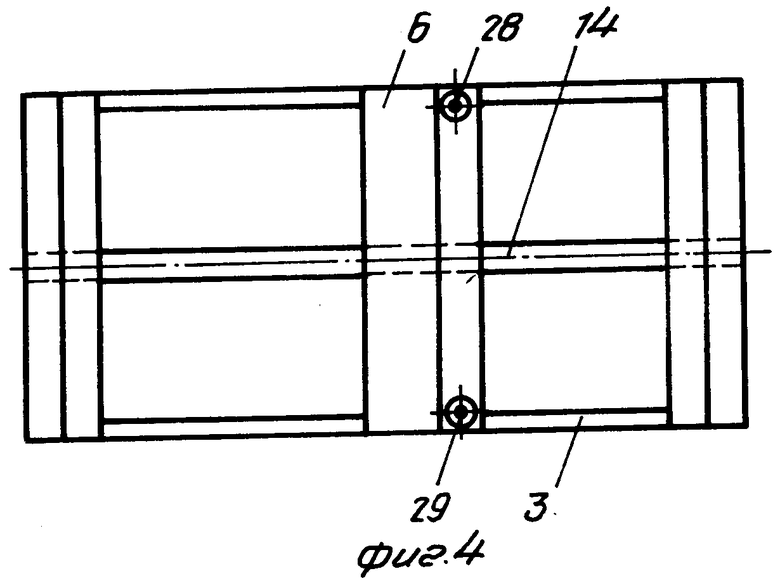
На фиг. 1 представлено транспортное средство; на фиг. 2 - то же, при движении по наклонному основанию; на фиг. 3 - принципиальная схема включения и выключения механизма стабилизации; на фиг. 4 - остов транспортного средства.
Транспортное средство содержит подрессоренную раму 1, шасси 2, остов 3, грузовую платформу 4 для размещения перевозимого груза 5, механизм привода грузовой платформы 6, треугольное основание 7, включающее в себя датчик скорости 8, датчик загрузки 9, датчик крена 10. Все они связаны с аналогово-цифровым преобразователем 11, который связан с компаратором 12, связанным с усилителем 13. Подрессоренная масса имеет возможность менять свое положение относительно шасси, т.к. крепится к нему на горизонтальном продольном шарнире 14. Усилитель связан с двумя электромагнитами 15 и 16, которые могут перемещать трехпозиционный гидрораспределитель 17, работающий в двух режимах напора и слива, две возвратные пружины 18 и 19 возвращают золотник в исходное положение после завершения работы. В гидромагистралях находятся клапаны 20 и 21, дроссели 22 и 23. Клапан обеспечивает беспрепятственный ход жидкости под давлением. Дроссель обеспечивает плавное стекание жидкости в сливную емкость. Насос подключен к электродвигателю. В гидросистеме установлен бак 24 с рабочей жидкостью, перепускной клапан 25, гидронасос 26, который приводится в действие электродвигателем 27. Изменение положения подрессоренной массы транспортного средства происходит за счет работы гидродомкратов 28 и 29.
Устройство работает следующим образом.
При движении по криволинейной траектории на горизонтальной поверхности и при равномерном распределении груза на платформе 4 датчики 9 и 10 не выдают сигнал в аналого-цифровой преобразователь 11. В этом случае отсутствуют боковые дестабилизирующие грузовую платформу силы, а следовательно, и аналого-цифровой преобразователь 11 выдает сигнал на компаратор 12 меньшей величины опорного сигнала (Uоп). Вся система находится в покое. При движении по криволинейной траектории или по склону возникают боковые составляющие действующих сил. Появляется крен грузовой платформы и боковое смещение груза 5 относительно заднего моста. Датчики 9 и 10 выдают сигнал в аналого-цифровой преобразователь 11. Далее сигнал, соответствующий усилию взаимодействия, поступает на компаратор 12 и при условии превышения этого сигнала над опорным сигналом (Uоп), далее через усилитель мощности 13 сигнал подается на электромагнит 15 или 16, который переместит золотник влево или вправо в зависимости от крена и на электродвигатель 27 привода насоса 26. Вследствие этого жидкость под давлением, создаваемым насосом 26 пойдет в гидродомкрат 28 или 29, проходя при этом через клапан 20 или 21. Стабилизация будет осуществляться путем поперечно-углового поворота грузовой платформы 4 относительно горизонтального продольного шарнира 14. Когда дестабилизирующие силы исчезнут, сигнал от датчиков 9 и 10 станет меньше величины Uоп, произойдет сброс давления в гидросистеме путем отключения электродвигателя 27. Гидродомкрат 28 или 29 под тяжестью груза 5, размещенного на грузовой платформе 4 придет в исходное положение. Жидкость, вытесняемая поршнем домкрата пройдет через нерегулируемый дроссель 22 или 23. Клапан 20 или 21 закроет напорную магистраль. Дроссель предохранит платформу 4 от резкого удара при опускании. Таким образом, грузовая платформа 4 плавно возвратится в прежнее исходное положение. Жидкость через перепускной клапан 25 возвратится в сливную емкость 24.
Техническая эффективность изобретения заключается в том, что в целом статическая и динамическая устойчивость транспортного средства увеличивается из-за снижения центра масс, а механические кинематические связи рамы и подрессоренной массы проще.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система боковой стабилизации транспортного средства | 1984 |
|
SU1224187A1 |
| УСТРОЙСТВО ТЕРМОКОМПЕНСАЦИИ КВАРЦЕВОГО ГЕНЕРАТОРА | 1990 |
|
RU2007839C1 |
| Устройство для измерения рельефа местности | 1986 |
|
SU1339395A2 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 1992 |
|
RU2022810C1 |
| ТЕРМОКОМПЕНСИРОВАННЫЙ ГЕНЕРАТОР | 1991 |
|
RU2030091C1 |
| СИСТЕМА ВТОРИЧНОГО ЭЛЕКТРОПИТАНИЯ | 1994 |
|
RU2065619C1 |
| КУЗОВ ТРАНСПОРТНОГО СРЕДСТВА ДЛЯ ПЕРЕВОЗКИ НЕВИБРОСТОЙКИХ ГРУЗОВ | 1991 |
|
RU2026212C1 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ | 1991 |
|
RU2006868C1 |
| АНАЛИЗАТОР НАПРЯЖЕНИЯ | 1990 |
|
RU2024880C1 |
| ГРУЗОПОДЪЕМНЫЙ КРАН НА КОЛЕСНОМ ХОДУ | 1990 |
|
RU2079428C1 |
Использование: в транспортном машиностроении, в частности на колесных транспортных средствах, имеющих грузовую платформу. Транспортное средство содержит подрессоренную раму, шасси, остов, грузовую платформу, гидросистему и автоматическую систему регулирования положения грузовой платформы. При движении по криволинейной траектории или по склону возникают боковые силы, появляются крен грузовой платформы и боковое смещение груза относительно заднего моста. Датчики крена выдают сигнал в аналогово-цифровой преобразователь и далее - в компаратор. Если сигнал превышает опорный, то через усилитель он подается на электромагниты, которые перемещают золотник влево или вправо в зависимости от крена, и на электродвигатель привода насоса. Жидкость насосом подается в гидродомкраты в соответствии с креном. Когда дестабилизирующие силы исчезнут, сигнал от датчика крена станет меньше опорного. Гидронасос выключится, давление в гидросистеме упадет, и гидродомкраты под тяжестью грузовой платформы и груза станут в исходное положение. 4 ил.
ТРАНСПОРТНОЕ СРЕДСТВО, содержащее подрессоренную раму, закрепленную на шасси, остов, грузовую платформу с кузовом, установленную на заднем мосту транспортного средства, и систему управления положением грузовой платформы, отличающееся тем, что оно снабжено треугольным по форме основанием, смонтированным на раме и кинематически связанным с остовом посредством горизонтального продольного шарнира, и гидродомкратами, установленными по обоим бортам транспортного средства между рамой и остовом и гидравлически соединенными с системой управления положением грузовой платформы, выполненной в виде трехпозиционного четырехлинейного электроуправляемого гидрораспределителя, одна из линий которого соединена с насосом, другая - с гидробаком, третья и четвертая его линии соединены каждая через параллельно установленные обратный клапан и дроссель с соответствующими гидродомкратами, а электромагниты управления гидрораспределителем и орган управления двигателя привода насоса соединены через усилитель, компаратор и аналого-цифровой преобразователь с датчиками скорости загрузки и крена транспортного средства.
| Самоходный разбрасыватель минеральных удобрений | 1983 |
|
SU1166702A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
