Поставленная иель достигается Тем, что в известном способе автоматического (Уравновешивания моста переменного тока для измерения одной составляющей комплексной проводимости, основанном на уравновеыивапии моста переменного тока по неиэмеряеМоИ составляющей этой проводимости током, равным модули разности токов, г1ротекающих через измеряемую и образцовую проводимости и включаюцем операцию определения направления уравновешивания, в каждом такте уравновешивания моста переменного тока первоЦачально измеряют модуль его сигнала Церавновесия, а затем осуществляют регулирующее воздействие, величину которого вибирают прямо пропорциональной результату произведенного ранее измерения.
В соответствии с предлагаемым техническим решением в каждом дискретном такте уравновеиивания моста производится приближение к состоянию равновесия не на олив иаг, а сразу На несколько шагов. При этом для Определения необходимого количества LjaroB первоначально измеряют амплит уду сигнала неравновесия, а затем Необходимое количество иагов принимают прямо пропорциональн 1М результату измерения.
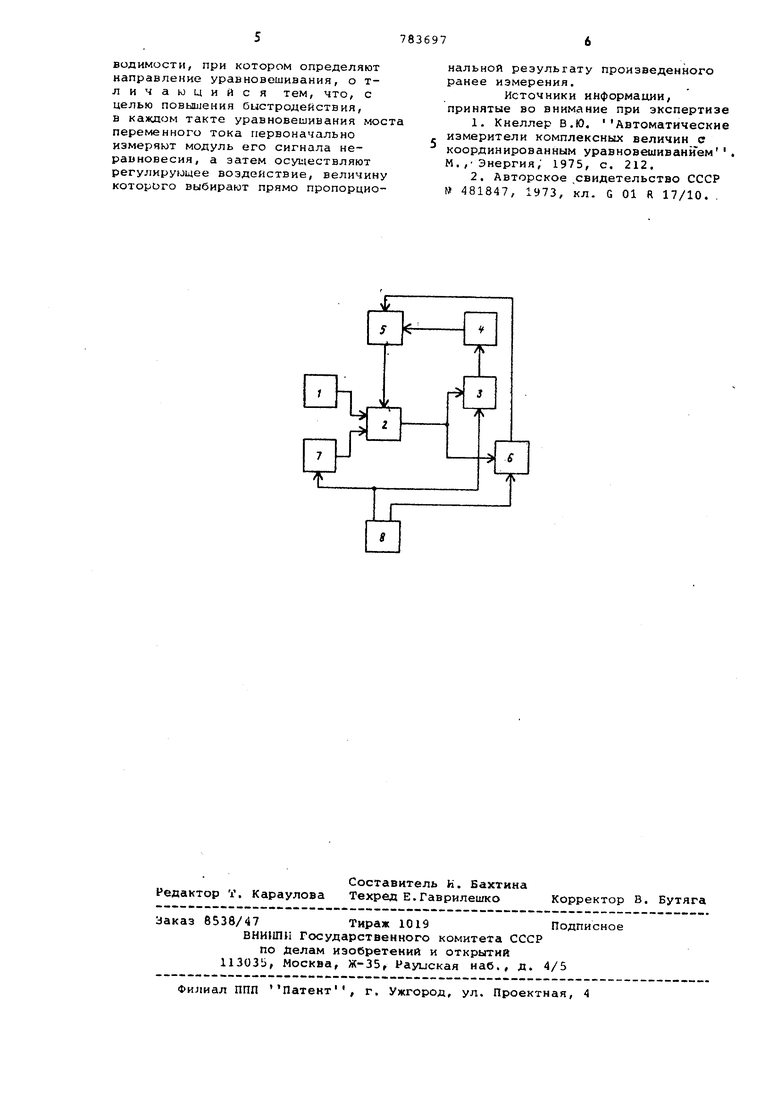
: На чертеже представлена блок-схем йоста, уравновешиваемого по предлагаемому опособу.
Прибор содержит генератор 1 синусоидального напряжения, собственно мостовую измерительную схему 2, уравНовеи иваемую при помощи коммутации ее элементов, анализатор 3 модуляционных приращений мрдуля сигнала (например, напряжения) неравновесия мостовой измерительной cxeNsu, три:- гер 4 реверса направления счета, реверсивний счетчик 5, преобразователь б напряжения в число импульсов, модулятор 7. Работа устройства синхронизируется блоком 8 управления.
Уравновешивание мостовой иэмериТельной схемы 2 по предлагаемому способу осуществляется по тактам. .Вначале в анализаторе 3 производится запоминание текущего значения модуля (амплитуды) напряжения неравновесия мостовой измерительной схемы 2. При появлении сигнала .на выходе а блока j управления включается модулятор 7, а в-анализаторе 3 производится определение знака модуляционного прира1;;ения напряжения неравновесия. Положительный знак этого приращения означает, что модуляционное воздействи на мостовую измерительную схему 2 осуществлено модулятором 7 в направлении удаления от состояния равновесия, а отрицательный знак - в направлении приближения к равновесию В соответствии с этим логика работы анализатора 3 такова, что при положительном знаке модуляционного приращения модуля напряжения неравновесия мостовой измерительной схемы на триггер 4 реверса подается импульс, изменяющий направление счета реыерсивного счетчика 5 на противоположное, а при отрицательном знаке - состояни триггера реверса остается неизменным 7аким образом, импульс на выходе блока 8 управления обеспечивает установку направления счета в сторон приближения к равновесию при произвольном начальном состоянии триггера 4 реверса.
Одновременно с этим сигнал неравнвесйя подается на преобразователь 6 напряжения в число импульсов, построенный, например, на основе генератор импульсов переменной частоты, управляемого напряжением. При появлении импульса на выходе б блока 8 управления этот преобразователь вырабатывает конечную последовательность импульсов, ЧИСЛО которых пропорционально модулы сигнала неравновесия мостовой измерительной схемы 2. Импульсы преобразователя 6 подаются на счетный вход реверсивного счетчи.ка Ь. При изменении состояния реверсивного счетчика производится коммутация уравновешивающих элементов в мостовой измерительной схеме, которая обеспечивает приближение моста к равновесию. По окончании счета последовательности импульсов прибор готов к отработке следующего такта уравновешивания, осуществляемого АЛЯ уточнения состояния равновесия, если это уточнение необходимо. Признаком достижения состояния равновесия является сведение к нулю с заданной точностью напряжения неравновесия мостовой измерительной схеми.
Использование предлагаемого способа автоматического уравновешивания моста переменного тока для измерения одной составляющей комплексной проводимости обеспечивает по сравнению с существующими способами следующие преимущества:
а)повышение быстродействия моста в 2-Ь раз,
б)обеспечение независимости времени уравновеиивания от степени неравноьесия в пределах одной декады.
Формула изобретения
Способ автоматического уравновеиивания моста переменного тока для измерения одной составляющей комплексной проводимости, основанный на уравновешивании моста переменного тока по неизмеряемой составляющей этой провод мости током, равным модул.о разности токов, протекающих через измеряемую и образцовую провидимости, при котором определяют направление уравновешивания, о тличаюцийс я тем, что, с целью noBhiujeHHH Сыстродействия, в каждом такте уравновешивания мос переменного тока первоначально измеряют модуль его сигнала неравновесия, а затем осуществляют регулирующее воздействие, величину которого выбирают прямо пропорциональной результату произведенного ранее измерения.
Источники информации, принятые во внимание при экспертизе
1,Кнеллер В.Ю. Автоматические измерители комплексных величин с координированным уравновешиванй ем М., Энергия; 1975, с. 212.
2.Авторское .свидетельство СССР № 481847, 1973, кл. G 01 R 17/10. .
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического уравновешивания цифровых экстремальных мостов переменного тока | 1980 |
|
SU894580A1 |
| Способ автоматического уравновешивания моста переменного тока для измерения одной составляющей комплексной проводимости | 1980 |
|
SU868601A1 |
| Цифровой автоматический экстремальныйМОСТ пЕРЕМЕННОгО TOKA | 1979 |
|
SU828096A1 |
| Цифровой экстремальный мост переменного тока | 1987 |
|
SU1479882A1 |
| Способ уравновешивания цифровых модуляционных экстремальных мостов переменного тока и устройство для его осуществления | 1985 |
|
SU1312490A1 |
| Способ уравновешивания цифровых экстремальных мостов переменного тока и устройство для его осуществления | 1986 |
|
SU1418626A1 |
| Цифровой автоматический экстремальный мост переменного тока | 1978 |
|
SU763803A1 |
| Способ уравновешивания безмодуляционного экстремального моста переменного тока | 1980 |
|
SU966603A1 |
| Способ уравновешивания цифровых экстремальных мостов переменного тока | 1989 |
|
SU1762246A1 |
| Цифровой модуляционный экстремальный мост переменного тока | 1974 |
|
SU708241A1 |
