1
Изобретение относится к электроизмерительной технике и может быть исяопьзов а но для построения автоматических мостов прременного тока.
Известен способ уревновешивания безмо дупяционного экстремального моста пере- s менного тока, иЬпользуемый в цифровых автоматических экстремальных мостах переменного тока. Согласно этому способу безмодуляционные мосты сначала уравновешивают по линиям полной развязки вспоМогательным устройством уравновешивания, а затем осуществляют перенос числового значения этого вспомогательного устройства в соответствующее устройство уравновешивания моста Л.}.
Недостатком такого способа уравновеши вания является сложность его реализации и трудность обеспечения следящедпо работы прибора, при котором обеспв- , чивается минимальная динамическая погрещиость измерения.
Наиболее близким к предложенному по съо&лу назначению и технической сущности является способ уравновешивания беэмодуляционного экстремального моста переменного тока, согласно которому мосто.вую цепь для измерения абсолютного и относительного параметров уравновешива.ют посредством поочередного пошагового регулирова НТВ каждого из уравновешивающих параметров мостовой цепи в направлениях, определяемых знаком приращения ее выходного сигнала, вызванного предшествуклцей регулировкой соответствующего параметра X2j.
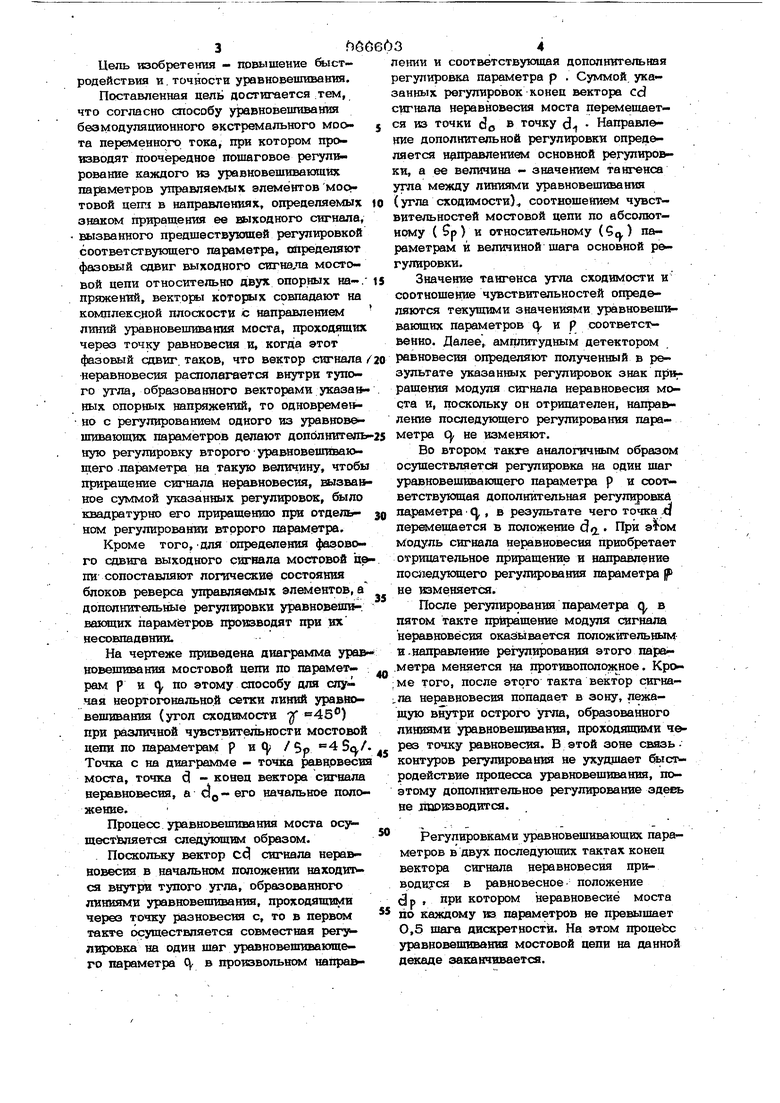
Недостатком известного способа уравтновешивания является сильная зависимость динамических и метрологических характеристик прибора от взаимосвязи контуров регулирования. Гфи этом с умень шением угла сходимости резко падает быстродействие измерительного устройства, а если чувствительность мостовой цепи по ураввбвешивающим параметрам с шхественно -отличается /более чем в 3 раза/, свижается и точность уравновешиваЕПОя. Цель изобретения - повышение fecrродействия и, точности уравновешивания. Поставленная цель достигается тем, что согласно способу уравновешивания без модуляционного экстремального моота переменного тока, при котором npt изводят поочередное пошаговое регулирование каждого вз уравновешивающих параметров унравляемьгх элементовмос товой цеш1 в направлениях, определяемых знаком приращения ее выходного сигнала, вызваннохчэ предшествующей регулировкой соответствуюшего параметра, определяют фазовый сдвиг выходного сигн9,1а мостовой цепи относительно двух опорных на-. пряжений, векторы которых совпадают на комплекс юй плоскости с направлением линий уравновешивания моста, проходящих через точку равновесия и, когда этот 4йзовый сдвиг, таков, что вектор сигнала неравновесия располагается внутри тупого угла, образованного векторами указанных опорных напряжений, то одновремен но с регулированием одного из уравнов©шивающих параметров делают дополнитель ную регулировку второго уравновешйвак щего параметра на такую величину, чтобы приращение сигнала неравновесия, вызвавное суммой указанных регулировок, было квадратурно его приращению при отдельном регулировании второго парам1етра. Кроме того, для определения фазового сдвига выходного сигнала мостовой це пи сопоставляют логические состояния блоков реверса управляемых элементов, а дополнительные регулировки уравновешт -. вающих параметров производят при их несовпадении. На чертеже приведена диаграмма уравновешивания мостовой цепи по параметрам р и « по этому способу для случая неортогонально.й сетки линий уравйовешивашш (угол сходимости -JT ) при различной чувствительности мостовой . цепи по параметрам р и С|; / 5р Точка с на диаграмме - точка равнрвесия моста, точка - конец вектора сигнала неравновесия, а dg- его начальное положение. Процесс уравновешивания моста осущест вляется следующим образом. Поскольку вектор сс| сигнала неравновесия в начальном положешш находит ся внутри тупого угла, образованного линиями уравновешивания, проходящими через точку разновесия с, то в первом такте осуществляется совместная регу лнровка на один шаг уравновешивакотего параметра С в произвольном напра&лении и соответствуюшая дополнительная регулировка параметра р , Суммой указанных регулировок конец вектора cd сигнала неравновесия моста перемепшется из точки So в точку (3 . Направление дополнительной регулировки определяется направлением основной регулировки, а ее величина - значением тангенса угла между линиями уравновешивания (угла сходимости) соотношением чувствительностей мостовой цепи по абсолютному ( 5р) и относительному (Gn,) параметрам и величиной шага основной регулировки. Значение тангенса угла сходимости и соотношение чувствительностей определяются текущими значениями уравновешиваюших параметров q, и Р соответственно. Далее, амплитудным детектором равновесия определяют полученный в результате указанных регулировок знак пр№рашения модуля сигнала неравновесия моста и, поскольку он отрицателен, напра&ление последующего регулирования параметра q, не изменяют, Во втором такте аналогичным образом осушествляетсй регулировка на один шаг уравновешивающего параметра р и соот ветствуюшая дополнительная регулировка ла.раметра С , в результате чего точка xj перемещается в положение (.. При модуль сигнала неравновесия приобретает отрицательное приращение и направление поатедующего регулирования параметра не изменяется. После регулирования параметра q, в пятом такте приращение модуля сигнала неравновесия оказывается положительным и .направление регулирований этого пара .метра меняется на противоположное. того, после этого такта вектор сигнаna неравновесия попадает в зону, пежащую внутри острого угла, образованного лишшмн уравновешивания, проход$Ш1ИМИ через точку равновесия. В этой зоне связь контуров регулирования не ухудшает быстродействие процесса уравновешивания, поэтому дополнительное регулирование здесь не .поршводится. Регулировками уравновешивающих параметров в двух последующих тактах конец вектора сигнала неравновесия приводиуся в равновесное положение dp . при котором неравновесие моста по каждому ю параметров не превышает 0,5 шага дискретности. На этом процеЬс уравновешяванав мостовой цепи на данной декаде заканчивается. OatntM to критериев, позволяющих onp& делтить в какой из зон расяолагаэтся век тор сигнала нерав1говесия, может служить соотношение направлений регулирования уравновешивающих параметров р и су при движении моста к равновесию. В зонах, лежащих внутри острых углов между линиямИ уравновешивания, проходящими через точку равновесия моста, эти направления совпадают, а в остальных,зонах они про тивоположны. При нахождении вектора сигнала неравновесия внутри тупого угла (в тактах 1-4) параметр р при его регулировании в сторону уменьшения сизлшла неравновесия уменьшается, а пара ; метр q, - увеличивается. Когда же векто сигнала неравновесия попадает внутрь ост рого угла (в тактах 6 и 7), юба параметра уменьшаются при движении моста к равновесию. Таким образом, применение предложен ного способа уравновешивания обеспечивает хорошую сходимость и минимальную погрешность уравновешивания при любых углах сходимости и соотношениях чувствитепьностей мостовой пепн и позволяет значительно повысить быстродействие .измерительного устройства. При шмерени параметров объектов с воизмеримыми . значениями активной и реактивной состав ляюших выигрыш в быстродействии достигает трех и более раз. Формула изсгСГретения 1. Способ уравновешивания безмод I ляционного экстремального моста переменногч) тока, при которсм производят поочередное пошаговое регулирование каждого из уравновешивающих параметров управляемых элементов мостовой цепи в. напра ениях, определяемых знаком прирашещга ее выходного сигнала, вызванного предшествующей регулировкой соответствуюшего параметра, отличаю и и с я тем, что, с целью повышения быстродействия и точности уравновешивания, определяют фазовый сдвиг выходного сигнала мостовой пепи ртносгггельно двух опорш;1х напряжений, векторы которня совпадают на комплексной плоскости с направлением линий уравновешивания моо та, проходя1цих через точку равновесия, и когда этот фазовый сдвиг таков, что вектор сигнала неравновесия располагается внутри тупого угла образованного екторами указанных опорных напряжений, то, одновременно с регулированием одного из уравновешивающих параметров, делают дополнительную регулировку второго ура новешивающего параметра ва такую величину, чтобы приращение сигнала неравнове |Сия, вызванное суммой указанных регулировок, было квадратурно его приращению при отдельном регулировании второго параметра. 2. Способ поп. l«oтличaющ и и с я тем, что для определения фазового сдвига ВЫ7СОДНОГО сиг{&ла мостовс цепи сопоставляют логические состояния блоков реверса управляемых элемеЫ тов, а дополнительные регулировки уравновешивающих параметров производят при их несовпадении.. Источники ииформапии, принятые во внимание при акспертвзе 1.Авторское свидетельство СССР № 346677. кл. G 01 R 17/10. 24.08.70. 2.Проблемы технической электродинамики. Сб., вып. 67, Киев, Наукова думка, 1978.

| название | год | авторы | номер документа |
|---|---|---|---|
| Универсальный цифровой экстремальный мост переменного тока | 1987 |
|
SU1451607A1 |
| Способ выбора поддиапазона измерений в универсальных экстремальных мостах переменного тока | 1987 |
|
SU1429044A1 |
| Способ поразрядного уравновешивания автоматических экстремальных мостов переменного тока | 1988 |
|
SU1516987A1 |
| Способ автоматического уравновешивания цифровых экстремальных мостов переменного тока | 1980 |
|
SU894580A1 |
| Цифровой экстремальный мост переменногоТОКА C пОдЕКАдНО-СлЕдящиМ уРАВНОВЕшиВА-НиЕМ | 1979 |
|
SU836596A1 |
| Автоматический мост переменного тока | 1984 |
|
SU1213423A1 |
| Способ уравновешивания экстремальных мостов переменного тока | 1988 |
|
SU1555673A1 |
| Цифровой экстремальный мост переменного тока | 1987 |
|
SU1479882A1 |
| ЦИФРОВОЙ АВТОМАТИЧЕСКИЙ ЭКСТРЕМАЛЬНЫЙ МОСТ ПЕРЕМЕи!т10ГО ТОКА | 1972 |
|
SU346677A1 |
| Способ уравновешивания цифровых экстремальных мостов переменного тока | 1989 |
|
SU1762246A1 |

