весия, а затем осуществляют регулирующее воздействие, величину которого выбирают прямо пропорциональной рез-ультату произведенного ранее из мерения Г2.
Недостатком этого способа уравновешивания моста является его низкое быстродействие, обусловленное наличием погрешности формирования регулирующего воздействия за счет того, что в каждом такте уравновешивания оно выбрано прямо пропорциональным текущему значению амплитуды сигнала неравновесия мостовой схемы. Функциональная связь между амплитудой выходного сигнала мостовой схемы и неравновесием по измеряемой составляющей комплексной проводимости имеет более сложную зависимость, хотя и близкую к линейной. При таком формировании регулирующего воздействия не учитывается зависимость амплитуды выходного сигнала мостовой схемы от неравновесия по второй, неизмеряемой составляющей , а также от напряжения генератора, питающего мостовую схему, и от коэффициента передачи усилителя сигнала неравновесия. В результате снижается -точность уравновешивания в каждом такте. Это приво- . дит к возрастанию числа тактов уравновешивания, необходимых для обеспечения заданной погрешности уравновешивания, т.е. к снижению быстродействия моста.
Цель изобретения повышение быстродействия .
Поставленная цель достигается тем, что в способе автоматического уравновешивания мост.а переменного тока для измерения одной составляющей комплексной проводимости, заключающемся в том, что ток, протекающий по неизмеряемой составляющей, компенсируют противофазным током, равным ПО модулю разности токов объекта измерения и образцовой меры и змеряемой составляющей, в каисдом такте измеряют амплитуду сигнала неравновесия, осуществляют модуляцию регулируемого параметра, а затем в каждом такте измеряют также амплитуду модуляционного приращения сигнала неравновесия, находят частное от деления амплитуды сигнала неравновесия на амплитуду его модуляционного приращения и формируют регулирую Мве воздействие, пропорциональное этому частному.
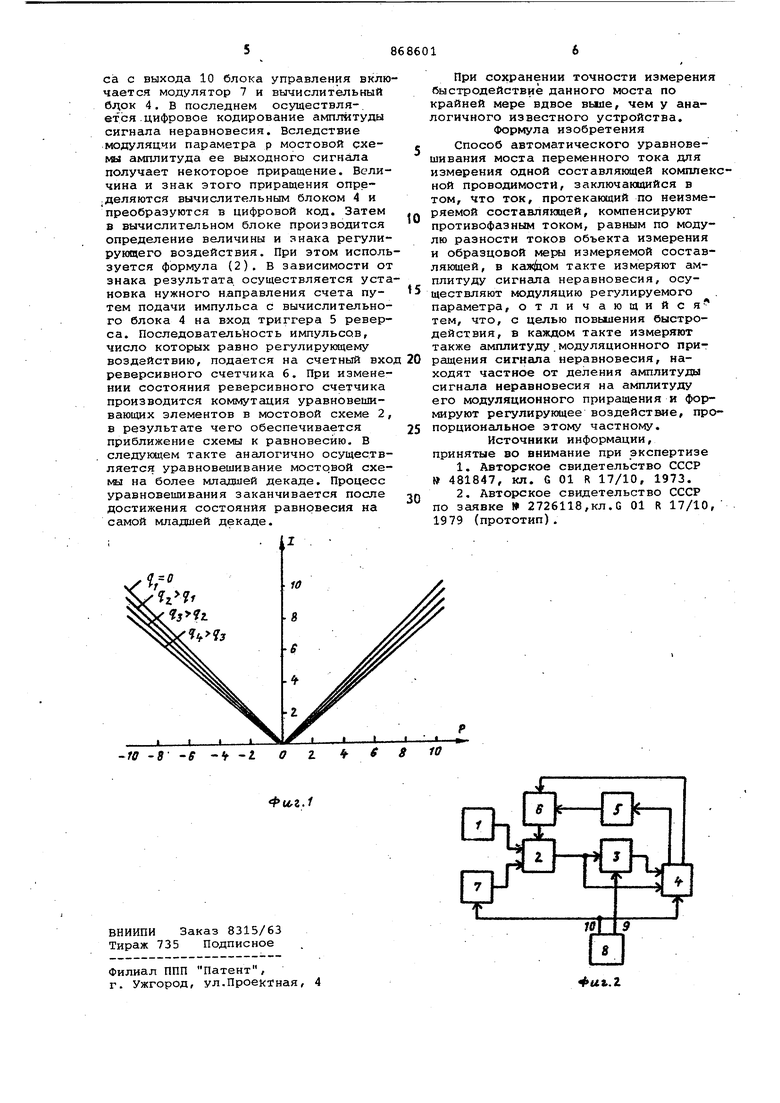
На фиг. 1 изображено семейство кривых, отражающее зависимость амплитуды (модуля) сигнала неравновесия мостовой измерительной схемы от двух параметров уравновешивания; на фиг.2 блок-схема моста переменного тока для измерения одной составляющей комп лексной проводимости.
На фиг. 1 показана зависимость амплитуды выходного сигнала (например тока Л) мостовой измерительной схемы
с комбинированным уравновешиванием от неравновесия по двум квадратурным параметрам - р и q. Параметр р прямо пропорционален дискретно уравновешиваемой составляющей комплексной проводимости , например q - неизмеряемоА составляющей, уравновешиваемой при помощи упрощенной аналоговой системы Из графиков видно, что амплитуда сигнала неравновесия прямо пропорционална неравновесию по измеряемому параметру р только при нулевом значении квадратурного параметра, т.е. когда q 0. В остальных случаях при q О зависимость амплитуды 3 от неравновесия по измеряемому параметру р отличается от линейной.
Преимуществом предлагаемого способа уравновоиивания моста является то, что при формировании- регулирующего воздействия учитывается это отклонение зависимости от линейной, а именно регулирующее воздействие формируется не только по амплитуде 3 (p.q.) сигнала неравновесия, но также с учетом чувствительности (р , 4) /а мостовой схемы по параметру р при q const Геометрической интерпретацией чувствительности Sp на фиг.1 является крутизна наклона графика функции О (p,j,) с заданными р и q,. Приближенно она определяется как отношение приращения аЗ амплитуды сигнала неравновесия, обусловленного модуляционным приращением д р параметра р, к этому приращению
So РЯ .. 4Д. (п
ЭР д РМ
В предлагаемом устройстве регулирующее воздействие параметру р выбирается из условия
3 A3
U)
U РМ
Cw
т.е. с учетом постоянства др,оно пропорционально отношению амплитуды сигнала неравновесия к модуляционному приращению этой амплитуды
На фиг. 2 представлена блок-схема моста переменного тока для измерения одной составляющей комплексной проводимости. Устройство содержит генераTQP 1 синусоидального напряжения, собственно мостовую измерительную схему 2 с комбинированным уравновешиванием, блок 3 запоминания, вычислительный блок 4 с числоимпульсным выходом, триггер 5 реверса, реверсивный счетчик 6 импульсов, модулятор 7. Работа моста синхронизируется блоком 8 управления с выходами 9 и 10.
Уравновешивание мостовой схемы 2 осуществляется подекадно по тактам, формируемым блоком 8 управления. В начале очередного такта при появлении импульса на выходе 9 блока управления сигнал неравновесия мостовой схемы подается на блок 3 запоминания, где производится запоминание амплитуды этого сигнала. При подаче импуль

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического уравновешивания моста переменного тока для измерения одной составляющей комплексной проводимости | 1979 |
|
SU783697A1 |
| Способ автоматического уравновешивания цифровых экстремальных мостов переменного тока | 1980 |
|
SU894580A1 |
| Способ уравновешивания цифровых экстремальных мостов переменного тока | 1989 |
|
SU1762246A1 |
| Способ уравновешивания цифровых экстремальных мостов переменного тока | 1987 |
|
SU1413537A1 |
| Способ уравновешивания экстремальных мостов переменного тока | 1988 |
|
SU1555673A1 |
| Цифровой автоматический экстремальныйМОСТ пЕРЕМЕННОгО TOKA | 1979 |
|
SU828096A1 |
| Способ уравновешивания цифровых экстремальных мостов переменного тока и устройство для его осуществления | 1986 |
|
SU1418626A1 |
| Способ уравновешивания цифровых модуляционных экстремальных мостов переменного тока и устройство для его осуществления | 1985 |
|
SU1312490A1 |
| Автоматический цифровой мост переменного тока | 1983 |
|
SU1190269A1 |
| Способ уравновешивания экстремальных мостов переменного тока | 1987 |
|
SU1474555A1 |
