(54) РЕГУЛЯТОР С ПЕРЕМЕННОЙ СТРУКТУРОЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Релейный регулятор | 1979 |
|
SU857929A1 |
| Система экстремального регулирования | 1981 |
|
SU1056132A1 |
| МНОГОЗОННЫЙ ИНТЕГРИРУЮЩИЙ РЕГУЛЯТОР ПЕРЕМЕННОГО НАПРЯЖЕНИЯ С АВТОМАТИЧЕСКИМ РЕЗЕРВИРОВАНИЕМ КАНАЛОВ РЕГУЛИРОВАНИЯ | 2011 |
|
RU2470360C1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2015519C1 |
| Импульсный регулятор | 1981 |
|
SU1004969A1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2010 |
|
RU2441265C1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2369893C1 |
| МНОГОЗОННЫЙ ИНТЕГРИРУЮЩИЙ РЕГУЛЯТОР ПЕРЕМЕННОГО НАПРЯЖЕНИЯ | 2011 |
|
RU2471282C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2385480C1 |
| Электропривод | 1981 |
|
SU1083319A1 |
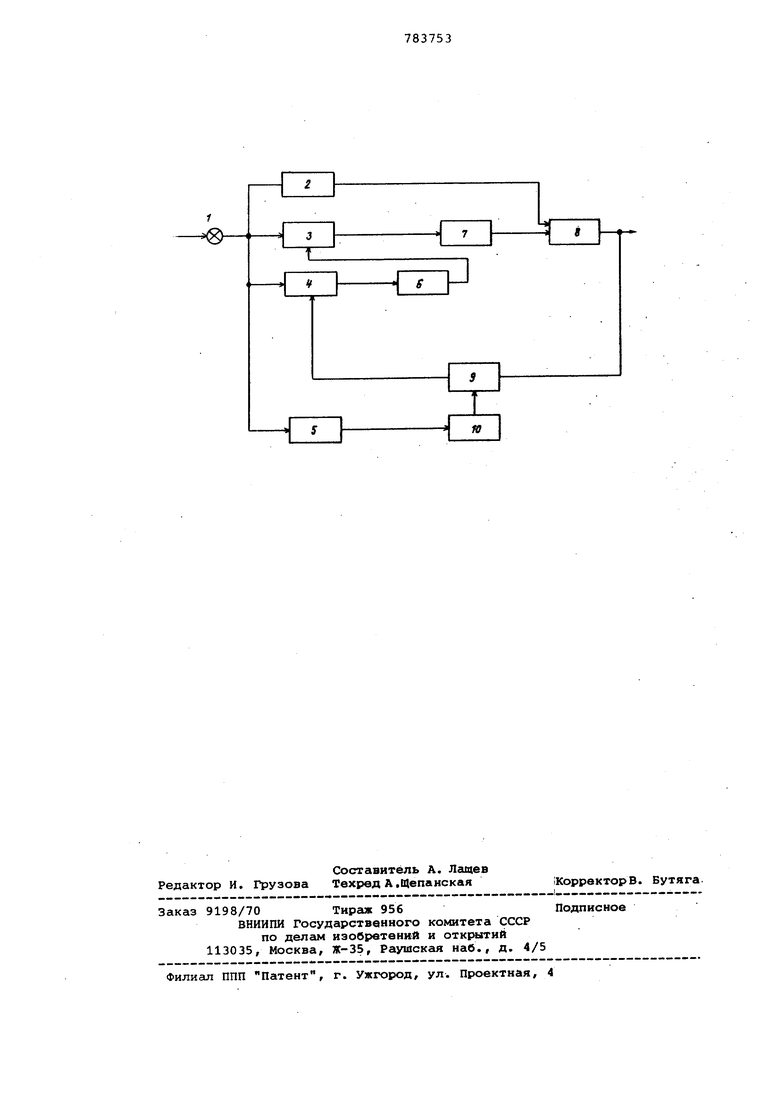
Изобретение относится к технике автоматического управления и может быть эффективно применено в регуляторах с переменной структурой, предназначенных .для управления разл ными объектами. Известен регулятор с переменной .структурой, содержащий интегральный блок, пропорциональный блок, соединенный с блоком переключения, и бло формирования функции переключения, входы которых соединены с выходом устройства сравнения, суммирующий блок, входы которого подключены к выходам интегрального и пропорционашьного блоков, а выход - к выходному каналу устройства и входу блока формирования функции переключения 11 . В этом регуляторе увеличивается частота переключений в скользящем р жиме, однако теряется свойство неза висимости движения в скользящем режиме от параметровобъекта, что нежелательно при использовании рвгулятора для целей регулирования объе тов с переменнь1ми парс1метрами. Нсшболее близок к предлагаемому изобретению регулятор с переменной структурой, содержащий последовател но соединенные первый сумматор, формирователь функции переключения, блок логики, переключатель, пропорционашьный блок и второй сумматор, причем выход первого сумматора соединен со вторым входом переключателя и через интегратор со вторым входом второго сумматора 2j. Недостатком этого устройства является возникновение автоколебаний с увеличением весового коэффициента обратной связи по управлению для повышения частоты переключений в скользящем режиме, что уменьшает точность устройства. Цель изобретения - повышение статистической точности регулятора при сохранении максимгшьного быстродействия в большом. Это достигается тем, что регулятор с переменной структурой содержит последовательно соединенные реле, блок временной задержки и ключ, выход которого соединен со вторым входом формирователя функции переключения, а вход - с выходом второго сумматора, вход реле соединен со входом интегратора. На чертеже дана структурная схема предлагаемого регулятора.
Выход первого сумматора 1 соедине с входами интегратора 2,переключателя 3, формирователя 4 функции переключения и реле 5. Выход формирователя 4 функции переключения через блок 6 логики подключен к управляющему входу переключателя 3, Выход переключателя 3 через пропорциональный блок 7 связан с входом второго сумматора 8, второй вход которого соединен с выходом интегратора 2, выхЬд второго сумматора 8 через кЛюч 91, второй вход которого через блок iO временной задержки связан с выхоцом реле 5, соединен с входом формирователя 4 функции переключения.
Регулятор работает следующим Образом.
При достаточно больших значениях рассогласования ( на входе сум-Матора 1 9 разомкнут и на выхо} е второго сумматора 8 формируется Сигнал управления U в виде
fi --)xdtt-o6Xi
о
Ui.
t
-Sxdt-jb4) ,
т
V- о где о , Ь - коэффициенты управления по отдельным каналам; Т - постоянная времени интегратора; - функция переключени Й-Х.СЧ| с - коэффициент. При малых значениях рассогласования lS|/L,cf с выхода реле 5 через блок 10 временной задержки поступа сигнал на замыкание клюЧа 9. При .этом функция переключения в формир вателе 4 формируется следующим образом:S-x. .где k - весовой коэффициент, в бираемый из условия об печения нужной частоты переключения в конце скользящего режима. При включении регулятора гиперплоскость переключения формируется закону .
Если по входному сигналу сумматор 1 находится в насыщении, то с выхода регулятора идет максимальный сигнал управления.
При достаточно малом уровне сигна„ ла переключения с выхода реле 5 через блок 10 временной задержки для исключения ложных срабатываний вьщается сигнал на замыкание ключа 9.- Таким образом, при изменении коэффициентов объекта и различных начальных усло ВИЯХ возникновения скользящего режима выполняется
,,
где 1-2- момент поключения;
S -Ь - момент, когда
Таким образом, эффект, ох идаемый от использования предлагаемого регулятора, заключается в повышении частоты переключений в скользящем режиме и увеличении за счет этого статической точности системы регулирования, поскольку чем выше частота переключений, тем меньше амплитуда и ниже частота автоколебаний, вызы5 BaeNKix в СПС наличием нелинейностей и т. д. Формула изобретения Регулятор с переменной структурой, содержащий последовательно соединенные первый сумматор, формирователи функции переключения, блок логики, переключатель, пропорциональный блок и второй сумматор, причем выход первого сумматора соединен со, вторым входом переключателя и через интегратор со вторым входом второго сумматора, отличаю1дийся тем, что,с целью повышения статистической точности регулятора,ОН со- держит последовательно соединенные реле, блок временной задержки и ключ, выход которого соединен со вторым входом формирователя функции переключения, а вход - с выходом второго сумматора, вход реле соединен со входом интегратора. Источники информации, принятые во внимание при экспертизе 1.Авторское.свидетельство СССР , кл. G 05 В 13/02, 1972. 2.Авторское свидетельство СССР W 354399, кл. 6 05 В 13/00, 1972 (прототип).
