(54) РЕЛЕЙНЬт РЕГУЛЯТОР

| название | год | авторы | номер документа |
|---|---|---|---|
| Релейный регулятор | 1980 |
|
SU900258A1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2005 |
|
RU2284561C1 |
| Релейный регулятор | 1978 |
|
SU765782A1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2013 |
|
RU2531865C1 |
| ФАЗОСДВИГАЮЩЕЕ УСТРОЙСТВО | 2005 |
|
RU2288532C1 |
| ФАЗОСДВИГАЮЩЕЕ УСТРОЙСТВО | 2001 |
|
RU2216846C2 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2369893C1 |
| Релейно-линейный регулятор | 1981 |
|
SU1012200A1 |
| ПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПОСТРОЕНИЯ АВТОКОЛЕБАТЕЛЬНЫХ САМОНАСТРАИВАЮЩИХСЯ СИСТЕМ | 1992 |
|
RU2032925C1 |
| Устройство для настройки регуляторов | 1980 |
|
SU938256A1 |
Изобретение относится к регулирующим устройствам автоматики, к оптимальным системам управления, а также к регуляторам замкнутых систем с кусочно-постоянным управлением, обеспечивгиощим изменение знака управляющего воздействия при состояниях системя, определяемых в фазовом простран стве гиперповерхностями переключения.
Известны регуляторы замкнутых систем, осуществляющие управление в К интервалов постоянства управления при полной информации о состоянии объекта tl.
Наиболее близким к предлагаемому изобретению является регулятор с кусочно-постоянным управлением в К интервалов, содержащий блок формирования импульсов обнуления и последова-, тельио соединенные усилитель с ограничением и блок умножения, а ташке последовательно соединенные блок определения модуля и блок запоминания максимума, шлход которого через соответствукщие последовательно соединенные функциональные преобразователи, сумматоры и релейные элементы соединены с соответствующими входами блока умножения, причем вход усилителя с ограничением .соединен со входом блока определения модуля, вход блока формирования импульсов обнуленця соединен с усилителя с ограничителем, а выход - с входом обнуления блока запоминания максимума, выход блока определения модуля соединен также со вторыи н входами сумматоров 1.2 J,
Недостатком регулятора является
10 наличие дополнитель 1ых динамических пограииостей при стабипизгщни регулируемой переменной состояния, обусловленных автоколебаниями в системе.
Цель изобретения - повешение
15 точности регулятора в режиме стабилизсщий за счет повышения частоты перекладки релейного у подавляющего воздействия я тем самым- снижения гшплитуды колебаний регулируемой
20 переменной состояния от периодических переклгщок управлякщего воздействия,
Указаннгл цель достигается тем, что в регулятор, содержащий усилитель
25 с ограничением, выход которого соедимеи с первьм входом блока умножения, ai вход - с входсм блока определения модуля, выход которого С9единен че- рез блок запоминания ксимума со
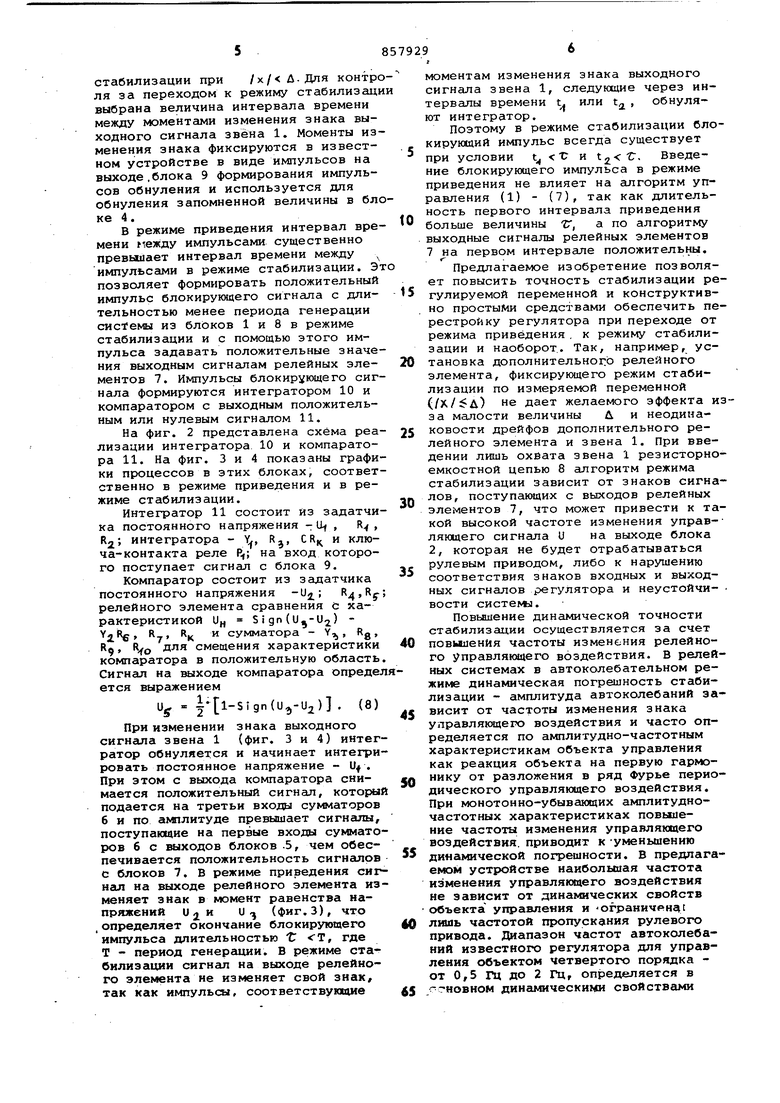
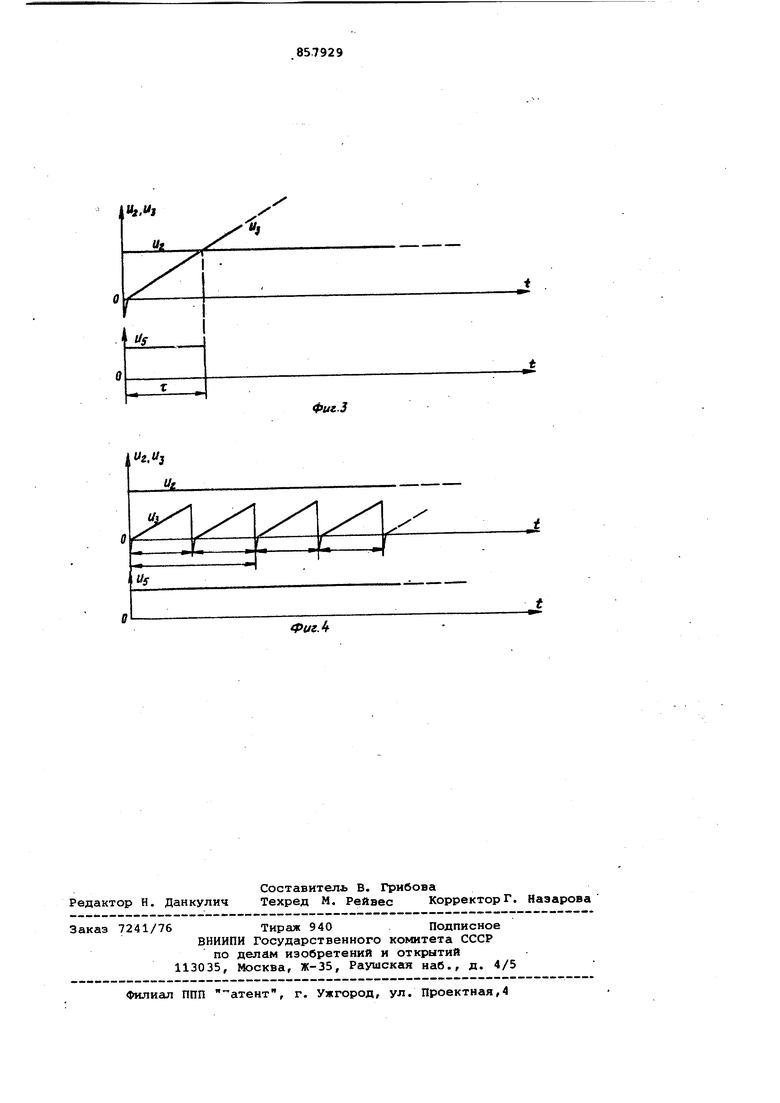
Ц входами фувкционгшьнЕлх преобразователей, выходы каждого из которых через соответствующие последовательно соединенные сумматоры и реле подключены к остальным входам блока умножения, вторые входы Сумматоров сое динены с выходом блока определения модуля, введены звено обратной связи и последовательно соединенные формирователь импульсов, интегратор и ком паратор, выходом подключенный к третьим вxoдouvl сумматоров, причем выход формирователя импульсов соеди,нен с вторлм входом блока запоминания максимума, а вход - с выходом усилителя с ограничением и входом эвена обратной связи, выход которого соединен с входом усилителя с ограничением. На фиг.1 представлена блок-схема регулятора; на фиг. 2 - пример реализации устройства, состоящего из последовательно соединенных интегратора и компаратора; на фиг. 3 и 4 графики процессов в блоках, приведенных на фиг,2. - ч Регулятор (фиг.1) состоит из последовательно соединенных усилителя 1 с ограничением, блока 2 умножения и последовательно соединенных блока 3 определения модуля и блока 4 запоминания максимума, последовательно соединенных функциональных преобразователей 5, сумматоров 6 и релейных элементов 7, соединенных с соответствующими входами блока 2 . умножения. Вход усилителя 1 с ограничением соединен с входом блока 3 определения модуля, выход которого соединен также со вторыми входами сумматоров 6. Усилитель 1 с ограничением охвачен по;южительной обратной связью через резисторноемкостную цепь 8, Выход усилителя 1 с ограничением соединен также со входом блока 9 формирования импульсов обнулени выход которого соединен со входом об нуления блока 4 запоминания максимума и с входом обнуления интегратора 10. Выход интегратора 10 через компаратор 11 соединен с третьими входами сумматоров 6. В режиме приведения фазового сос тояния объекта управления из точки начального состояния в область,содержё щую нулевую точку, управляющее воздействие формируется в блоке умн 2 в соответствии с зависимостьюU--tn51grn(./X/-X,-), .(() где X - измеряемая переменная состо ния системы, поступающая на вход регулятора. Сигнал С формируется в усилителе 1 с ограничителем в соответствии со следующими выражениями 1+1 при (2) -1 при (3) ix при (х)Д, (4) где Д - величина зоны линейности статической характеристики усилителя 1, определяющая. : область стабилизации измеряемой переменной. В режиме приведения значение сигнала определяется выргшениями (2) или (3). Сигналы ( XY ) формируются в блоках 3,4,5,6 и 7. Сигнал /х/ формируется в блоке определения модуля 4 и поступает на вторые входы сумматора 6. На первые входы сумматоров поступают сигналы Х| - абсолютные значения координат переключения, которые определяются выргикениями{ (х1)при sijgTi X-3tghx; (5) 1 jn CWhoiOnpH 31д;и к (6) to при(йб18П1Х/а1) , (7) где функции Пц - ( П- функции) Функции предсказания координат переключения в зависимости от экстремального значения измеряемой переменной X. СигНсШы реализуются в блоках определения модуля 3, запоминания максимума 4 и в функциональных преобразователях 5. Алгоритм (1) реализует К интервалов знакопостоянства управления для перевода фазового состояния в соответствии с гиперповерхностями переключения. По окончании процесса приведения при /X/ Д регулятор работает в ре-. жиме стабилизации регулируемой переменной состояния. Режим стабилизации как в известном , так и в предлагаемом регуляторе, автоколебательный. Но в предлагаемом изобретении применен известный принцип повыпения частоты автоколебаний за счет введения обратной связи в виде резисторноемкостной цепи 8, охватывающей усилитель 1 с ограничением. Особенностью данной схемы является то, что автогенерация система из блоков 1 и 8 наступает при и,таким образом, осуществляется автоматическое переключение с режима приведения на режим стабилизации. В соответствии с теорией линеаризации система, состоящая из блоков 1,8 и 2, может быть представлена линейным элементом только при условии постоянства знаков сигналов с релейных элементов 7, которое обеспечивается за счет блокировки этих сигналов. Блокировка должна осуществляться в режиме стабилизации при .Для контр ля за переходом к режиму стабилизац выбрана величина интервала времени между моментами изменения знака выходного сигнала звена 1. Моменты из менения знака фиксируются в известном устройстве в виде импульсов на выходе,блока 9 формирования импульсов обнуления и используется для обнуления запомненной величины в бл ке 4 . В режиме приведения интервал вре мени между импульсами существенно превьшает интервал времени между импульсами в режиме стабилизации. Э позволяет формировать положительный импульс блокирующего сигнала с длительностью менее периода генерации системы из блоков 1 и 8 в режиме стабилизации и с помощью этого импульса задавать положительные значе ния выходным сигналам релейных элементов 7, Импульсы блокирующего сиг нала формируются интегратором 10 и компаратором с выходным положительным или нулевым сигналом 11. На фиг. 2 представлена схема pea лизации интегратора 10 и компаратора 11. На фиг. 3 и 4 показаны графи ки процессов в этих блоках, соответ ственно в режиме приведения и в режиме стабилизации. Интегратор 11 состоит из задатчи ка постоянного напряжения т 1Ц , R , интегратора - Y, Rj, CR, и ключа-контакта реле R,; на вход которого поступает сигнал с блока 9. Компаратор состоит из зещатчика постоянного напряжения релейного элемента сравнения С характеристикой UH SignCu -U) , R,, RH и сумматора - , Rg, R, для смещения характеристики компаратора в положительную область Сигнал на выходе компаратора определ ется вырс1жением S i t -sgn(u,,-U2) . (8) При изменении знака выходного сигнала звена 1 (фиг. 3 и 4) интегратор обнуляется и начинает интегрировать постоянное напряжение - U. При этом с выхода компаратора онимается положительный сигнал, который подается на третьи входы сумматоров б и по амплитуде превышает сигналы, поступающие на первые входы сумматоров б с выходов блоков -5, чем обеспечивается положительность сигнгшрв с блоков 7. в режиме приведения сиг нал на выходе релейного элемента изменяет знак в момент равенства напряжений и (фиг.З), что определяет окончание блокирующего импульса длительностью t Т, где Т - период генерации. В режиме стабилизации сигнал на выходе релейного элемента не изменяет свой знак, так как импульсы, соответствугацие моментам изменения знака выходного сигнала звена 1, следующие через интервалы времени t. или t, , обнуляют интегратор. Поэтому в режиме стабилизации блокирующий импульс всегда существует при условии t и . Введение блокирующего импульса в режиме приведения не влияет на гшгоритм управления (1) - (7), так как длительность первого интервала приведения больше величины IT, а по алгоритму выходные сигналы релейных элементов 7 на первом интервале положительны. Предлагаемое изобретение позволяет повысить точность стабилизации регулируемой переменной и конструктивно простыми средствами обеспечить перестройку регулятора при переходе от режима приведения , к режиму стабилизации и наоборот.. Так, например, установка дополнительного релейного элемента, фиксирующего режим стабилизации по измеряемой переменной () не дает желаемого эффекта изза малости величины Д и неодинаковости дрейфов дополнительного релейного элемента и звена 1. При введении лишь охвата звена 1 резисторноемкостной цепью 8 алгоритм режима стабилизации зависит от знаков сигналов, поступающих с выходов релейных элементов 7, что может привести к такой высокой частоте изменения управ-лянвдего сигнала U на выходе блока 2, которая не будет отрабатываться рулевым приводом, либо к нарушению соответствия знаков входных и выходных сигналов регулятора и неустойчи- вости система. Повьниение динамической точности стабилизации осуществляется за счет повышения частоты изменения релейного управляющего воздействия. В релейных системах в автоколебательном режиме динамическая погрешность стабилизации - амплитуда автоколебаний зависит от частоты изменения знака управляющего воздействия и часто определяется по амплитудно-частотным характеристикам объекта управления как реакция объекта на первую гар «5нику от разложения в ряд Фурье периодического управляющего воздействия. При монотонно-убывающих амплитудночастотных характеристиках повыиение частоты изменения управляющего воздействия, приводит к уменьшению динамической погрешности. В предлагаемом устройстве наибольшая частота изменения управляющего воздействия не зависит от динамических свойств объекта управления и ограничрнг с ишь частотой пропускания рулевого привода. Диапазон частот автоколебаний известного регулятора для управения объектом четвертого порядка т 0,5 Гц до 2 Гц, оп эеделяется в гневном динамическими свойствами
объекта управления по отношению к измеряемой паренюнной состояния. Диапазон частоты автоколебаний сие- темы управления тем же объектом с предлагаемым регулятором может быть задан от 0,5 Гц до 10 Гц и ограничен сверху рулевого привода. Изменение диапазона частот автоколебаний приводит к повышению динамической точности стабилизации предлага мам регулятором более чем в четыре раза.
Формула изобретения
Релейный регулятор, содержащий усилитель с охраничением, выход которого соединен с первым входом блока умножения, а вход - с входом блока определения модуля, выход которого соединен через блок запоминания максимума-со входами функциональных преобразователей, выходы каждого, из которых через соответствующие последовательно соединенные суммато1мл
и реле подключены к остальным входа блока умножения, вторые входы сумматоров соединены с выходом блока определений модуля, отличающийся тем,что,с целью повьшения точности регулятора, в него введены звено обратной связи и последовательно соединенные формирователь импульсов, интегратор и компаратор, выходом подключенный к третьим входам сумматоров, причем выход формирователя импульсов соединен с вторым входом блока запоминания максимума, а вход - с выходом усилителя с ограничением и входом звена обратной связи, выход которого соединен с входом усилителя с ограничением.
Источники информации, принятые во внимание при экспертизе
fftn длалв 9
./
Х4.W, «z
