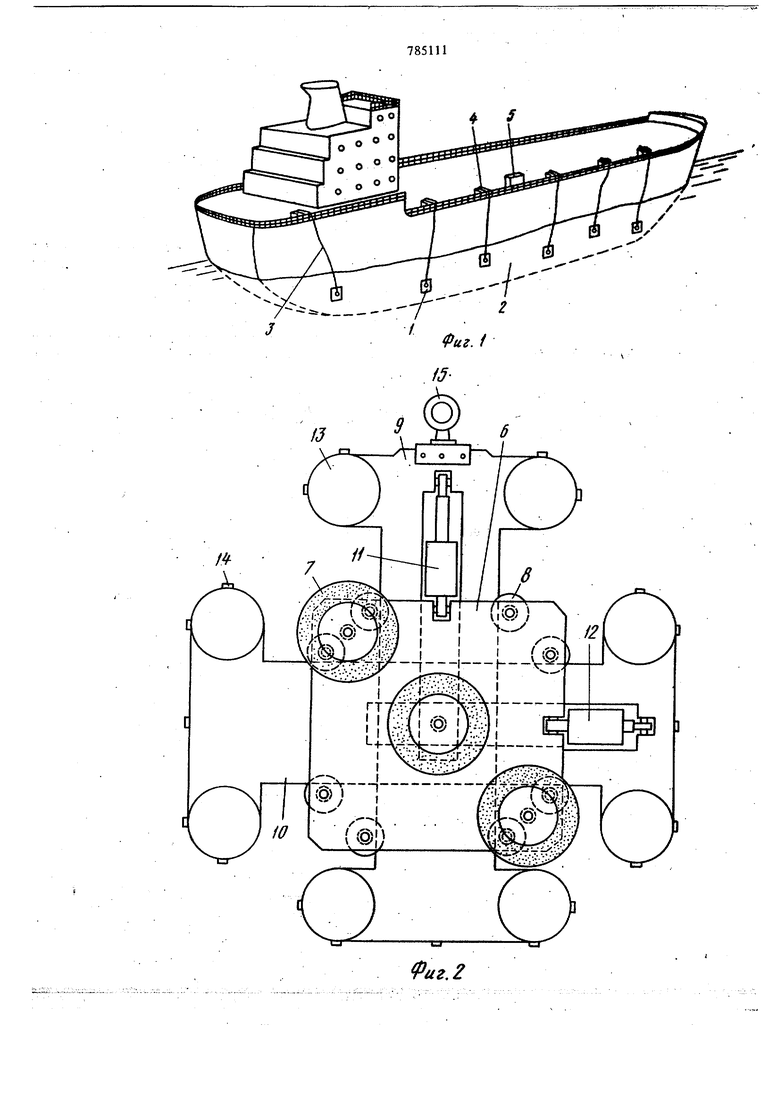
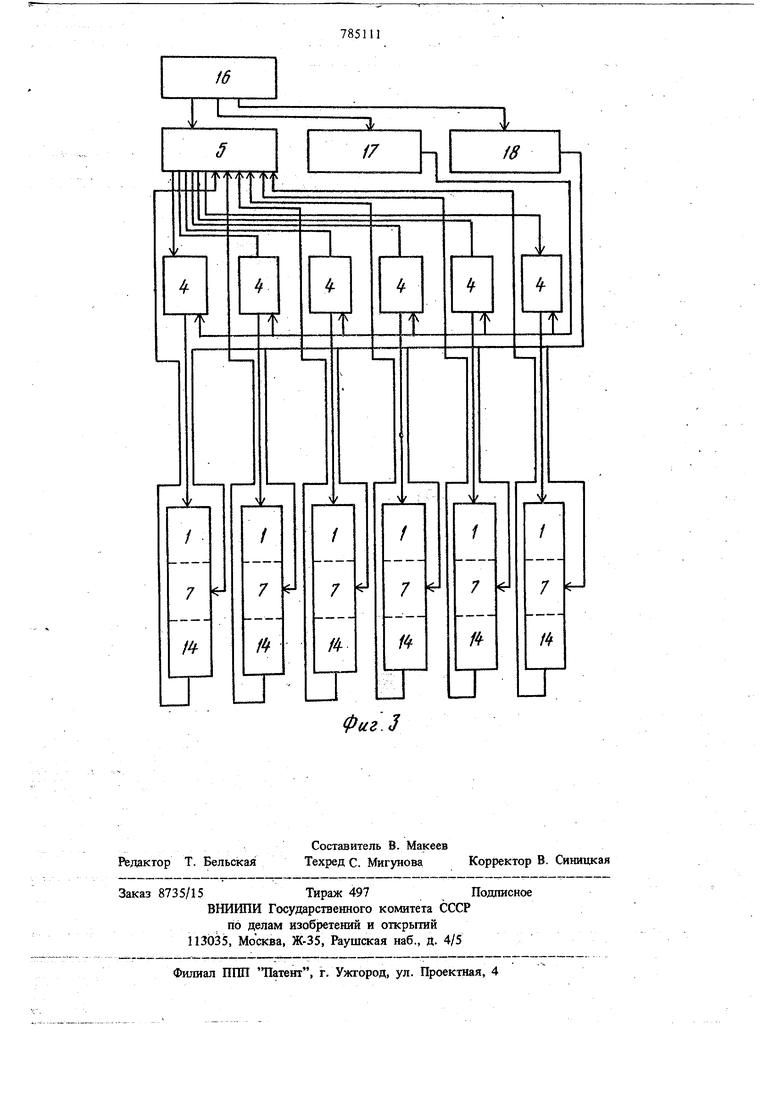
(54) УСТАНОВКА ДЛЯ, ПОДВОДНОЙ ОЧИСТКИ КОРПУСОВ Изобретение относится к доковому оборудованию, в частности к установкам для подвод ной очистки корпусов судов. Известна установка для подводной очистки корпусов судов, содержащая ряд транспортных устройств, имеющих приводы перемещения с электромагнитами и очистные органы с приводами, связанные с системой управления 1. Однако такая установка не дает возможност автоматизировать процесс очистки корпуса судна. Цель изобретения - обеспечение автоматизацииочистки корпуса судна. Для этого система управления состоит из управляющей ЭВМ, блоков управления, информационных датчиков и блоков питания транспортных устройств и очистных органов, причем выход управляющей ЭВМ электрически соединен посредством блоков управления с приводами перемещения транспо15тных устройств, блоки питания транспортных устройств подключены к блокам зшравления, а информационные датчики установлены на транспортных устройствах и подключены ко входу управляющей ЭВМ, при СУДОВ. этом блоки питания очистных органов подключены к приводам очистных органов. Кроме того, информационные датчики вьшолнены в виде концевых выключателей. На фиг. 1 показан общий вид установки, размещенной на корпусе судна; на фиг. 2 транспортное устройство; на фиг. 3 - структурная схема системы управления установки. Установка состоит из ряда транспортньсс устройств 1, перемещающихся по подаодиой части корпуса судна 2, связанных питающими щлангами 3 с блоками управления 4, электрически соединенными с управляющей ЭВМ 5. Транспортное устройство 1 состоит из суппорта 6, на котором укреплены три очистных органа 7 (например, торцовые щетки) с приводами (не обозначены на ЧЬртеже). На суппорте 6 имеются направляющие ролики 8, в направляющие канавки которых вставлены упругие платформы 9 и 10, связанные с суппортом посредством пщроцилиндров 11 и 12. На кон,-дах платформ закреплены кольцевые охлаждаемые электромагниты 13 постоянного тока. На электромагнитах закреплены информационные датчики 14 J .J ., . . 3 (например, концевые выключатели. Транспортное устройство имеет подъемное кольцо 15. Платформы 9 и 10 вместе с гидроцилиндрами 11 и 12 И; электромагнитом 13 образуют привод перемещения транспортного устройства. С 1стема управления транспортным устройством сострит из подключенной к бортовой эЯёКТричес кой сети 16 судна управляющей , к выходам которой подключены входы блоков управлени я 4, электрически соединенных с при водами п1ерёмещения транспортных устройств. К выходам ЭВМ 5 подключены также блоки питания 17 транспортных устройств и блоки питания 18 очистных органов. - Блоки питания 17 подключены к блокам управления 4. Блсжи питания 18 подключены к приводам очистных органов. Установка работает следующим образом . Блоки системы управления размещают на палубе судна, опускают транспортные устрЬйства 1 на; уровень ватерлинии. После достижения ватёрЛИйЯй система управления включается на реШмШШШШШШ 1иагйв1Ш «Чшад транспортных устройств 1. Последние перемеща Жсйпритгоочередном включении и выключении электромагнитов на платформах 9 и 10 и перемещении гидроцилиндрами -11 или 12 той платформы, электромагниты которой выключены. П этом каждая платформа например платформа 9 сначала перемещается гидроцилиндром 11 относительно зафиксированной электромагнитами другой платформы 10, а затем подтягивает гидрощшиндром 11, включенным на обратный ход, платформу 10 вместе с суппортом 6 (при этом электромагниты платформы Ш шлключёны, а электромагниты платформы 9 включены) Аналогично с помощью гидрощшиндра 12 прои йбййШтгбризонтальное перемещение тргшспортного устройства 1; включение электромагнитов и гидроцйлиндров 11 и 12 происходит по команде управляющей ЭВМ 5. При этом щетки ЧЙЩ1ют Корпус за один шаг на щирину размаха щеток и на длину щага платформы. . . ... .-., : -. 4 , . Программа управляющей ЭВМ 5 выполнена приспособленной к обводам корпуса очищаемого судна. На случай непредвиденных препятствий на платформе установлены информационнью датчики 14. Сигналы от информационных датчиков поступают в ЭВМ 5 и корректируют программу движенияг транспортного устройства, сигналы от которого поступили в ЭВМ. Это устройство по команде ЭВМ обходит препятствие и продолжает очистку по первоначальной программе. Использование установки увеличивает производительность труда за счет автоматизации процесса. Формула изобретения 1.Установка для подводной очистки корпуМв судов, содёрЖащая ряд транспортных устройств, приводы перемещения с электромагнитами и очистные органы с приводами, связанные с системой управления, отличающая с я тем,что, с целью обеспечения ШоШтиза1ШйочйстйИ корпуса судна, система управления состоит из управляющей ЭВМ, управления, информационных датчиков и блоков питания транспортных устройств И очистных органов, причем выход управляющей ЭВМэлектрически соединен посредством блоков управления с приводамиперемещения транспорт-. ных устройств, блоки питания транспортных устройств подаслючены к блокам управления, а информационные датчики установлены на транспортных устройствах и подключены ко входу управляющей ЭВМ, при этом блоки питания оМстттх Ьргайбв ТТбДКИ К приводам очистных органов. 2.Установка по п. 1, о т л и ч а ю щ а я с я тем, что инфбршцйоняь1е датчики вьшолHeHbf в виде концевь1х вьпслючателей. Источники информации, принятые во внимание при экспертизе 1. Патент США N 3858681, кл. 182-142, опублик. 1975 (прототип)..
иг,2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для очистки корпусов судов | 2019 |
|
RU2706267C1 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2014 |
|
RU2563074C1 |
| ПОГРУЖАЕМАЯ ПЛАТФОРМА-ТРАНСФОРМЕР И РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОСУЩЕСТВЛЕНИЯ ПОДВОДНЫХ РАБОТ | 2010 |
|
RU2438914C1 |
| Подводный робототехнический комплекс | 2015 |
|
RU2609618C1 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2446983C2 |
| ИНСТРУМЕНТЫ И ДАТЧИКИ, РАЗМЕЩАЕМЫЕ ПОСРЕДСТВОМ БЕСПИЛОТНЫХ ПОДВОДНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2014 |
|
RU2660197C2 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| ПЛАТФОРМА-АМФИБИЯ ДЛЯ ПЕРЕМЕЩЕНИЯ, ПОЗИЦИОНИРОВАНИЯ И НЕПОДВИЖНОГО БАЗИРОВАНИЯ РАБОЧИХ СРЕДСТВ И МЕХАНИЗМОВ В ХОДЕ ОСУЩЕСТВЛЕНИЯ РАБОТ | 2010 |
|
RU2468932C2 |
| ТРЕНАЖЕРНЫЙ КОМПЛЕКС ДЛЯ ПОДГОТОВКИ ЭКИПАЖЕЙ КОРАБЛЕЙ | 2007 |
|
RU2340950C1 |
| РОБОТОТЕХНИЧЕСКИЙ РАЗВЕДЫВАТЕЛЬНЫЙ КОМПЛЕКС АМФИБИЙНЫЙ | 2017 |
|
RU2654898C1 |