Изобретение относится к робототехнике и может быть использовано при создании роботов, используемых для очистки внешней поверхности корпусов судов.
Известен притапливаемый роботизированный комплекс для осуществления измерительных и подводно-технических работ, характеризуемый тем, что он содержит телеуправляемую платформу, выполненную с возможностью изменения плавучести, на которой размещены винтовые движители, обеспечивающие ее прижим и фиксацию, в том числе, к вертикальной поверхности исследуемого объекта, колесно-гусеничные движители, закрепленные на платформе с обеспечением возможности ее перемещения по поверхности объекта, в том числе, в зоне переменного смачивания, при этом на платформе дополнительно закреплены средства навигации, обеспечивающие точное позиционирование платформы при выполнении работ, средство освещения места проведения работ, средства демпфирования кабельной системы, передающей электрическое питание и информацию, при этом комплекс дополнительно содержит, по меньшей мере, силовые спускоподъемные лебедки с собственной системой управления для спуска-подъема и позиционирования сменных спускаемых измерительных и исполнительных устройств под воду, а также кабельную систему, предназначенную для передачи электрической энергии и управляющих команд на платформу, а также информации от платформы, при этом комплекс дополнительно содержит, по меньшей мере, один контейнер для хранения, эксплуатации и перевозки компонентов этого комплекса (см. патент РФ №2468959, БИ №34, 2012 г.).
Недостатком этого устройства является то, что он не предназначен для очистки внешних корпусов судов и не может эту очистку реализовать.
Известен также тросовый робот, содержащий жесткую раму, в углах которой закреплены лебедки с намотанными на них тросами. Свободные концы тросов прикреплены к подвижной платформе, на которой может быть смонтировано различное технологическое оборудование. Тросы переброшены через направляющие ролики с поворотным основанием. Ролики под воздействием троса автоматически поворачиваются так, чтобы их плоскость была ориентирована в плоскости, образованной участками троса, идущими от лебедки к ролику и от ролика к подвижной платформе. Таким образом обеспечивается близкий к постоянному угол схода троса с барабана лебедки, не зависящий от текущего положения мобильной платформы. Согласованно управляя приводами лебедок, удается перемещать подвижную платформу внутри рамы робота. Ослабляя или натягивая тросы можно управлять перемещением ориентацией платформы, а также жестко ее фиксировать в заданном положении (Tobias Bruckmann, Dieter Schramm, Lars Mikelsons, Manfred Hiller, and Thorsten Brandt. Wire Robots Part I: Kinematics, Analysis & Design. INTECH Open Access Publisher, 2008, pp. 109-132.).
Этот робот по своей технической сущности является наиболее близким к предлагаемому изобретению. Но в нем не решены вопросы перемещения рамы вдоль борта судна и ее жесткого закрепления на этом борту при выполнении механических операций. Кроме того, этот робот не содержит перемещаемых внутри рамы рабочих органов, обеспечивающих очистку внешних поверхностей корпусов судов.
Задачей, на решение которой направлено заявляемое техническое решение, является использование кабельного робота для быстрой механической очистки надводной и подводной поверхностей корпусов судов без дорогостоящей постановки этих судов в сухие доки и без использования человеческого труда.
Технический результат, который может быть получен при реализации заявляемого технического решения, выражается в установке внутри рамы рабочего органа, перемещаемого с помощью тросов вдоль и поперек очищаемой поверхности борта судна и (при необходимости) прижимаемого к этой поверхности с заданным усилием.
Поставленная задача решается тем, в устройстве для очистки корпусов судов, содержащем жесткую раму в форме прямоугольного параллелепипеда, ребрами которой могут являться любые полые конструкции, шесть внутренних управляемых приводами лебедок с намотанными на них тросами, свободные концы которых прикреплены к корпусу рабочего механизма, перемещаемого в пространстве рамы с их помощью, все тросы натянуты и переброшены через соответствующие им направляющие ролики, каждый из которых закреплен на горизонтальных конструкциях жесткой рамы с помощью вертикальных стоек с возможностью вращения вокруг них для поворота направляющих роликов таким образом, чтобы плоскость каждого из роликов всегда совпадала с проходящим через них тросом, идущими от соответствующей внутренней лебедки к рабочему механизму, обеспечивая надежное наматывание или разматывания троса с барабана каждой внутренней лебедки при любом текущем положении рабочего механизма, к верхней горизонтальной конструкции ребра рамы, расположенной вдоль борта судна, прикреплены два троса, которые намотаны на барабан тяговой лебедки, расположенной на борту судна и имеющей механизм перемещения ее вдоль этого борта, четыре внутренние лебедки закреплены, соответственно, на четырех вертикальных ребрах рамы в ее верхней части, а две остальные - на вертикальных ребрах рамы, расположенных у борта судна ниже первых, в корпус рабочего механизма помещен привод вращения, выходной вал которого жестко связан с вращающимся рабочим инструментом, в нижней части рамы на двух удаленных от борта судна ее вертикальных конструкциях ребер установлены управляемые шарниры, с внешней стороны к этим шарнирам с возможностью вращения относительно продольных осей конструкций указанных ребер прикреплены движители, на двух ближайших от борта судна вертикальных конструкциях ребер закреплены электромагниты, расположенные между этими конструкциями и бортом судна, причем каждый из электромагнитов первой пары, расположенной в горизонтальной плоскости, прикреплен к самой верхней части рамы, соответствующим ему стержнем, каждый из этих стержней имеет возможность телескопического изменения их длины посредством встроенных в них электроприводов и соединяется со своим электромагнитом шарнирно, а вторая горизонтально расположенная пара электромагнитов установлена на одинаковом расстоянии по вертикали от соответствующих магнитов первой пары, но выше нижней горизонтальной плоскости рамы, и жестко закреплена на соответствующих вертикальных конструкциях рамы, приводы всех шести внутренних лебедок, рабочего инструмента, двух движителей, двух управляемых шарниров, двух стержней, а также все четыре электромагнита подключены электрокабелями к соответствующим источникам питания с возможностью управления входными сигналами этих электроприводов и электромагнитов, причем рабочий инструмент может быть любым, а рабочий механизм может содержать любой источник механического воздействия на внешнюю очищаемую поверхность корпуса судна.
Сопоставительный анализ существенных признаков предлагаемого технического решения и существенных признаков аналога и прототипа свидетельствует о его соответствии критерию "новизна".
При этом отличительные признаки формулы изобретения обеспечивают расширение функциональных возможностей робота, позволяя ему очищать внешние поверхности бортов судна от устаревшей краски, а также наростов морских водорослей и организмов, без постановки судов в сухие доки.
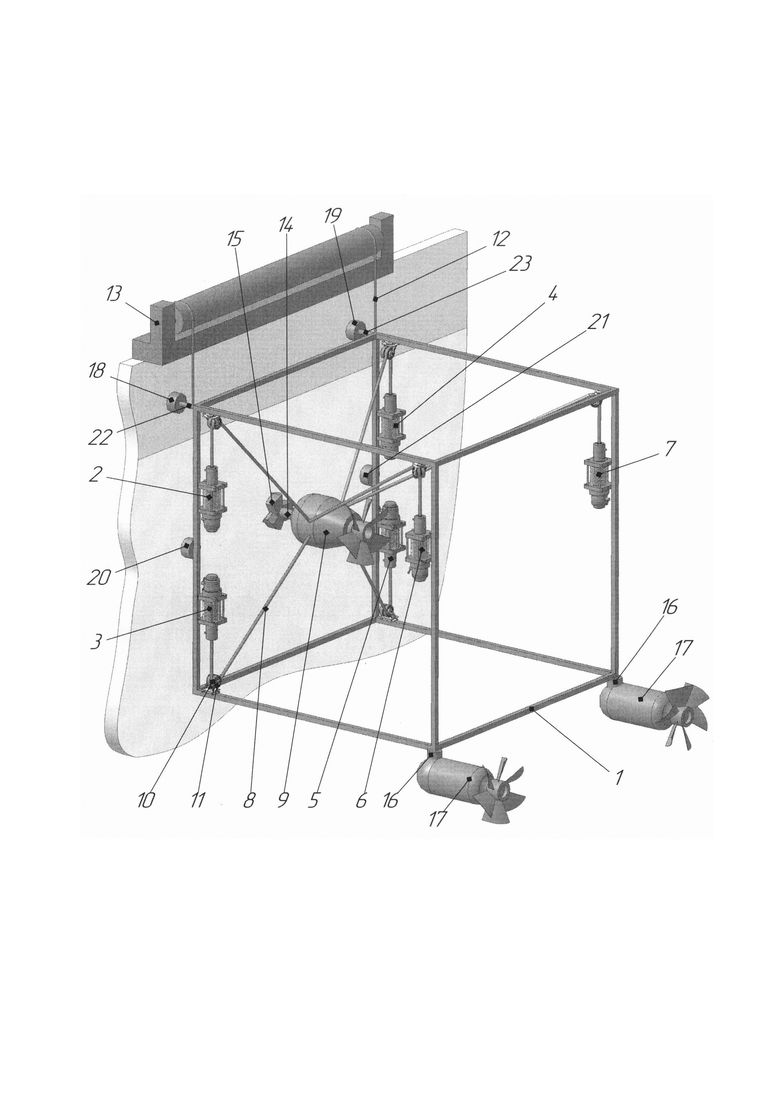
На чертеже представлена конструкция устройства для очистки корпусов судов, уже установленного на борту судна.
Устройство для очистки корпусов судов содержит жесткую раму 1 в форме прямоугольного параллелепипеда, ребрами которой могут являться любые полые конструкции, шесть внутренних управляемых приводами лебедок 2-7 с намотанными на них тросами 8, свободные концы которых прикреплены к корпусу рабочего механизма 9, перемещаемого в пространстве рамы 1 с их помощью, все тросы 8 натянуты и переброшены через соответствующие им направляющие ролики 10, каждый из которых закреплен на горизонтальных конструкциях жесткой рамы 1 с помощью вертикальных стоек 11 с возможностью вращения вокруг них для поворота направляющих роликов 10 таким образом, чтобы плоскость каждого из роликов 10 всегда совпадала с проходящим через них тросом 8, идущими от соответствующей внутренней лебедки к рабочему механизму 9, обеспечивая надежное наматывание или разматывания троса с барабана каждой внутренней лебедки при любом текущем положении рабочего механизма 9. К верхней горизонтальной конструкции ребра рамы 1, расположенной вдоль борта судна, прикреплены два троса 12, которые намотаны на барабан тяговой лебедки 13, расположенной на борту судна и имеющей механизм перемещения ее вдоль этого борта. Четыре внутренние лебедки 2,4 и 6,7 закреплены, соответственно, на четырех вертикальных ребрах рамы 1 в ее верхней части, а две остальные 3 и 5 - на вертикальных ребрах рамы 1, расположенных у борта судна ниже первых. В корпус рабочего механизма 9 помещен привод вращения, выходной вал 14 которого жестко связан с вращающимся рабочим инструментом 15. В нижней части рамы 1 на двух удаленных от борта судна ее вертикальных конструкциях ребер установлены управляемые шарниры 16, с внешней стороны к этим шарнирам с возможностью вращения относительно продольных осей конструкций указанных ребер прикреплены движители 17. На двух ближайших от борта судна вертикальных конструкциях ребер закреплены электромагниты 18-21, расположенные между этими конструкциями и бортом судна, причем каждый из электромагнитов 18, 19 первой пары, расположенной в горизонтальной плоскости, прикреплен к самой верхней части рамы, соответствующим ему стержнем, каждый из этих стержней 22, 23 имеет возможность телескопического изменения их длины посредством встроенных в них электроприводов и соединяется со своим электромагнитом шарнирно, а вторая горизонтально расположенная пара электромагнитов 20 и 21 установлена на одинаковом расстоянии по вертикали от соответствующих электромагнитов первой пары, но выше нижней горизонтальной плоскости рамы 1, и жестко закреплена на соответствующих вертикальных конструкциях рамы 1. Приводы всех шести внутренних лебедок 2-7, рабочего инструмента 15, двух движителей 17, двух управляемых шарниров 16, двух стержней 22, 23, а также все четыре электромагнита 18-21 подключены электрокабелями к соответствующим источникам питания с возможностью управления входными сигналами этих электроприводов и электромагнитов. Рабочий инструмент 15 может быть любым, например, щетка, или любым другим устройством очистки, а рабочий механизм 9 может содержать любой источник механического воздействия на внешнюю очищаемую поверхность корпуса судна, например, кавитационная пушка.
Вся конструкция устройства для очистки корпусов судов с помощью двух тросов 12, которые намотаны на барабан тяговой лебедки 13, может располагаться в любом месте по борту судна, которое требует очистки от старой краски и органических наростов подводной части. Эта лебедка 13 имеет возможность вручную или автоматически перемещаться вдоль борта судна по направляющим, установленным в верхней части его корпуса, одновременно обеспечивая смещение всего предлагаемого устройства очистки вдоль этого корпуса. Текущая длина размотанной части тросов 12 лебедки 13 определяет расположение устройства очистки по вертикали вдоль борта судна.
Рассматриваемое устройство для очистки корпусов судов работает следующим образом. В начале рама 1 с помощью лебедки 13 устанавливается на направляющие в любую исходную верхнюю часть очищаемого борта судна, так как эта часть обычно является чище нижней и обеспечивает более прочное исходное закрепление рамы 1 с помощью электромагнитов 18-21 на очищаемом участке борта. При этом стержни 22 и 23 имеют минимальную исходную длину. Затем включаются все электромагниты 18-21. Поскольку верхняя часть борта судна является более плоской, чем нижняя, то обычно сразу все четыре электромагнита обеспечивают прочную фиксацию рамы 1 на корпусе судна. Если очищаемый участок борта не является плоским, то один из электромагнитов может не вступить в контакт с бортом. Тогда после кратковременного включения маломощных электроприводов телескопических стержней 22 и 23 обеспечивается перемещение несработавшего электромагнита в сторону борта судна до его примагничивания. Ввиду малой мощности указанных электроприводов они обеспечивают только свободное перемещение электромагнита к борту, но не могут смещать раму от борта судна, если электромагнит уже сработал. Шарнирное крепление электромагнитов 18 и 19, соответственно, к стержням 22 и 23 необходимо для того, чтобы позволить этим электромагнитам занять наилучшую позицию даже на неровной (выпуклой) поверхности борта судна при изменяемой длине стержня 22 или 23.
После срабатывания всех электромагнитов 18-21 рама 1 жестко фиксируется на заданном участке борта судна и приводы стержней 22 и 23 отключаются. После этого по типовой программе начинают работать внутренние лебедки 2-7, обеспечивая программное изменение длин соответствующих тросов 8 и требуемое перемещение корпуса рабочего механизма 9 с рабочим инструментом 15 к очищаемому борту судна. Очистка начинается из самого верхнего положения механизма 9 в раме 1.
Поскольку верхняя - надводная часть судна является более чистой, плоской и вертикальной, чем нижняя-подводная, то усилия прижатия рабочего инструмента 15 к борту, обеспечиваемые натянутыми тросами 8 лебедок 2-5, являются достаточными для качественной очистки борта.
Для продолжения очистки механизм 9 смещается тросами 8 лебедок 2-7 в горизонтальном направлении вдоль борта судна. После очистки одной горизонтальной полосы борта в пределах рамы 1 механизм 9 смещается тросами 8 в новое нижнее положение, и горизонтальное смещение этого механизма тросами 8 продолжается в противоположную сторону внутри рамы 1. Это продолжается до тех пор, пока в уже описанной последовательности не будет очищен участок борта в пределах используемой рамы 1.
Для очистки соседних участков борта вначале с помощью лебедок 2-7 и их тросов 8 механизм 9 перемещается внутрь рамы 1 и удерживается в этом положении тросами 8 лебедок 6 и 7. Затем отключаются электромагниты 18-21, а стержни 22 и 23 приводятся их приводами в исходной положение. Рама 1 с помощью тросов 12 лебедки 13 смещается ниже предыдущего положения или вдоль борта вместе с лебедкой 13.
После очистки надводной части борта судна только нижняя часть рамы 1 опускается под воду для продолжения очистки вначале верхних слоев подводной части борта. Поскольку электромагниты 20 и 21 взаимодействуют только с уже очищенной или слабо загрязненной поверхностью, а всегда сильно загрязненная подводная часть судна не позволяет этим электромагнитам прочно закрепиться на борту, то в начале очистки подводной части судна электромагниты 20, 21 должны закрепляться на уже очищенной надводной поверхности борта. Поскольку нижняя часть судна имеет большую кривизну (отклонение от вертикали к продольной оси судна), чем верхняя, то с помощью включаемых приводов движителей 17, продольные оси которых исходно находятся в вертикальной плоскости, перпендикулярной борту судна, а тяги их винтов направлены в сторону борта, нижняя часть рамы 1 прижимается к этому борту для прочной стыковки нижней пары электромагнитов 20, 21 с этим бортом после их включения.
После очистки с помощью рабочего инструмента 15 первого подводного участка корпуса судна в пределах рамы 1 по уже указанной выше последовательности и технологии все электромагниты 20-21 отключаются, а рама 1 под действием своего веса немного отходит от борта судна. После этого движители 17 разворачиваются с помощью приводов управляемых шарниров 16 в противоположных направлениях так (см.чертеж), чтобы их продольные оси располагались в одной вертикальной плоскости, совпадающей с вертикальной гранью рамы 1, а сама рама располагалась между этими движителями. После включения приводов движителей 17 так, чтобы их тяги были направлены в одну сторону, рама 1 с их помощью вместе с лебедкой 13 смещается в горизонтальном направлении в нужную сторону вдоль борта судна для очистки его следующего подводного участка. Затем движители 17 с помощью приводов управляемых шарниров 16 опять разворачиваются в свое исходное положение. После включения всех электромагнитов 20-21 и приводов движителей 17 опять обеспечивается закрепление рамы 1 на борту судна. Этот процесс продолжается до полной очистки первой горизонтальной подводной полосы борта судна.
После завершения очистки указанной полосы электромагниты 20-21 отключаются, движители 17 находятся в исходном положении, а рама 1 с помощью тросов 12 лебедки 13 опускается вниз в положение, позволяющее нижней паре электромагнитов 20 и 21 соприкасаться с уже очищенной полосой подводной части судна и начать очистку следующей горизонтальной полосы подводной части борта. Процесс последующей очистки подводной части борта в горизонтальном, но противоположном направлении повторяется в уже описанной выше последовательности, чередуясь с вертикальным перемещением рамы 1 вниз, для начала очистки очередной ниже расположенной горизонтальной полосы борта судна. Работа по указанной схеме продолжается до полной очистки одного борта. Тот же самый процесс будет повторяться и при очистке другого борта судна в уже описанной выше последовательности.
Техническая реализация предложенного устройства не вызывает затруднения, так как при его реализации используются только типовые и уже хорошо отработанные элементы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СОЗДАНИЯ ПЛАВУЧЕГО ПОЛУПОГРУЖНОГО БУРОВОГО СУДНА И ЕГО УСТРОЙСТВО | 2013 |
|
RU2524700C1 |
| Мобильное роботизированное устройство | 2023 |
|
RU2829775C2 |
| Спускоподъемное устройство для малогабаритных необитаемых подводных аппаратов и опускаемых гидроакустических антенн с судна-носителя | 2021 |
|
RU2760798C1 |
| НОСИТЕЛЬ ТЕХНОЛОГИЧЕСКОГО ИНСТРУМЕНТА ДЛЯ ПОДВОДНО-ТЕХНИЧЕСКИХ РАБОТ | 2001 |
|
RU2219092C2 |
| КОМПЛЕКС ДЛЯ ПОДВОДНОЙ ДОБЫЧИ ПОЛЕЗНОГО ИСКОПАЕМОГО | 1999 |
|
RU2168633C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ЯКОРЕЙ | 2008 |
|
RU2466902C2 |
| СПОСОБ ПРИЕМА В ПОДВОДНУЮ ЛОДКУ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2328407C1 |
| ГРУНТОУКЛАДОЧНОЕ ПЛАВУЧЕЕ СРЕДСТВО | 1993 |
|
RU2078711C1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНОГО ОБОРУДОВАНИЯ | 2017 |
|
RU2659176C1 |
| Способ установки подледно-подводных заводов сжиженного природного газа (СПГ) Абрамова В.А. | 2018 |
|
RU2679699C2 |
Изобретение относится к робототехнике и может быть использовано при создании приводов манипуляторов. Конструктивные особенности заявленного устройства позволяют перемещать рабочий инструмент, предназначенный для очистки, в любом направлении вдоль очищаемой поверхности корпуса судна с обеспечением заданного расположения рабочего инструмента относительно этой поверхности. Обеспечивается очистка внешних поверхностей корпусов судов без их помещения в сухой док и без использования ручного труда. 1 з.п. ф-лы, 1 ил.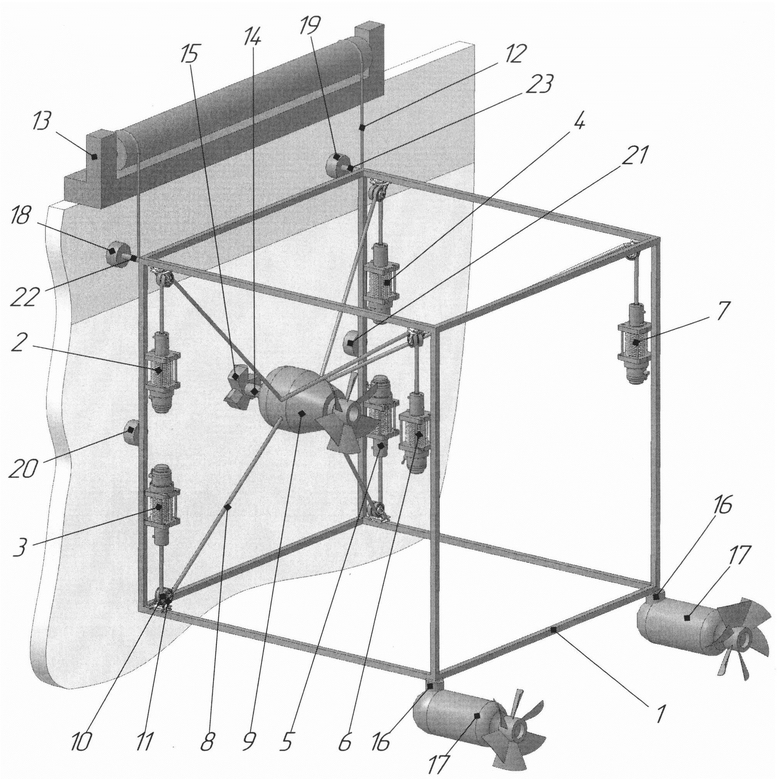
1. Устройство для очистки корпусов судов, содержащее жесткую раму в виде прямоугольного параллелепипеда с ребрами полой конструкции, шесть внутренних управляемых приводами лебедок с намотанными на их барабаны тросами, которые натянуты и переброшены через соответствующие им направляющие ролики и свободные концы которых прикреплены к корпусу рабочего механизма для его перемещения в пространстве рамы, при этом каждый направляющий ролик закреплен на горизонтальных ребрах жесткой рамы посредством вертикальных стоек с возможностью вращения вокруг них и поворота из условия совпадения плоскости каждого ролика с тросом, проходящим через них от соответствующей внутренней лебедки к рабочему механизму, с обеспечением наматывания или разматывания троса с барабана каждой внутренней лебедки при любом положении рабочего механизма, отличающееся тем, что
оно снабжено тяговой лебедкой, выполненной с возможностью размещения на корпусе судна и перемещения вдоль него посредством механизма перемещения, причем указанная лебедка содержит барабан, на который намотаны два троса, прикрепленные к верхнему горизонтальному ребру жесткой рамы, располагаемому вдоль очищаемого корпуса судна,
при этом четыре из указанных шести внутренних лебедок закреплены соответственно на четырех вертикальных ребрах жесткой рамы в ее верхней части, а две остальные – ниже указанных четырех лебедок на вертикальных ребрах жесткой рамы, располагаемых у корпуса судна,
рабочий механизм выполнен с вращающимся рабочим инструментом, жестко связанным с выходным валом расположенного в корпусе привода вращения,
в нижней части жесткой рамы на двух удаленных от очищаемой поверхности корпуса судна вертикальных ребрах установлены управляемые шарниры, к внешней стороне которых с возможностью вращения относительно продольных осей указанных вертикальных ребер прикреплены движители,
причем на двух вертикальных ребрах, располагаемых у поверхности корпуса судна с возможностью закрепления на ней, установлены четыре электромагнита из условия, что электромагниты первой пары, расположенные в горизонтальной плоскости, прикреплены шарнирно к самой верхней части жесткой рамы соответствующим стержнем, каждый из которых выполнен с возможностью телескопического изменения длины посредством встроенного электропривода,
а электромагниты второй пары жестко закреплены на вертикальных ребрах и расположены на одинаковом расстоянии по вертикали от соответствующих электромагнитов первой пары и выше нижней горизонтальной плоскости жесткой рамы,
при этом все приводы устройства и электромагниты подключены с возможностью управления входными сигналами к соответствующим источникам питания посредством электрокабелей.
2. Устройство по п. 1, отличающееся тем, что рабочий механизм снабжен источником механического воздействия на внешнюю очищаемую поверхность корпуса судна.
| Tobias Bruckmann and all | |||
| Wire Robots Part I: Kinematics, Analysis & Design | |||
| INTECH Open Access Publisher, 2008, p | |||
| Шкив для канатной передачи | 1920 |
|
SU109A1 |
| Устройство для автоматической очистки и окраски судового корпуса | 1977 |
|
SU770923A1 |
| US 4236477 A1, 02.12.1980 | |||
| US 20140076226 A1, 20.03.2014 | |||
| US 4149345 A1, 17.04.1979. | |||

