Изобретение относится к инструментам и датчикам для использования посредством беспилотных подводных транспортных средств при подводных работах, таких как относящиеся к морской добыче нефти и газа. Изобретение также относится к способам использования беспилотных подводных транспортных средств, инструментов и датчиков при подводных работах.
Зачастую необходимо выполнить задания по проверке, контролю, обслуживанию или строительству во время подводных работ. Ниже доступной водолазу глубины такие задания обычно выполняют посредством беспилотных подводных транспортных средств, таких как дистанционно управляемые транспортные средства, автономные подводные транспортные средства и автономные инспекционные транспортные средства.
Дистанционно управляемые транспортные средства отличаются тем, что имеют физическое соединение с надводным судном поддержки посредством связующего кабеля. По кабелю передают энергию, данные и управляющие сигналы и таким образом обеспечивают длительную работу дистанционно управляемого транспортного средства, хотя оно и ограничено в рабочем радиусе относительно судна поддержки длиной кабеля.
Рабочие дистанционно управляемые транспортные средства являются большими и достаточно мощными для выполнения различных подводных заданий по обслуживанию и строительству, в целях чего они могут быть модифицированы посредством добавления специализированных узлов или инструментов по модульному принципу. Например, в WO 03097446 описано, почему дистанционно управляемому транспортному средству могут понадобиться различные инструменты для различных работ, и как на нем может быть установлен набор взаимозаменяемых инструментов. Такие инструменты могут, например, включать инструменты, совершающие вращение, и инструменты, совершающие возвратно-поступательные движения, приводимые в действие гидравлическими или электрическими двигателями или приводами. Гидравлические двигатели или приводы работают на гидравлической текучей среде под давлением, обычно подаваемой посредством узла, соединенного с дистанционно управляемым транспортным средством. Для задач настоящего описания узел может рассматриваться как часть дистанционно управляемого транспортного средства или другого беспилотного подводного транспортного средства, к которому он присоединен.
Инспекционные дистанционно управляемые транспортные средства меньше, но более маневренные, чем рабочие дистанционно управляемые транспортные средства для выполнения заданий по проверке и контролю, хотя они также могут выполнять легкие задания по обслуживанию, такие как чистка с использованием подходящих инструментов. В дополнение к визуальной проверке с использованием освещения и камер инспекционные дистанционно управляемые транспортные средства могут удерживать датчики в контакте с подводной конструкцией, или вблизи нее, для проверки и контроля ее состояния или других параметров. Подводная конструкция может представлять собой любое оборудование, установленное под водой, включая трубопроводы, коллекторы, клапаны, конструкционные опоры, опорные плиты, плавучие емкости, подъемные трубы, приспособления для связи и т.д.
Примерами датчиков, используемых на подводных конструкциях, являются датчик катодной защиты для проверки катодной защиты и прибор для ультразвуковой диагностики для измерения толщины ультразвуковым способом и таким образом контроля эффектов коррозии. Таким датчикам требуется электрическая энергия, которую также подают от дистанционно управляемого транспортного средства.
Автономные подводные транспортные средства и автономные инспекционные транспортные средства представляют собой автономные автоматизированные аналоги дистанционно управляемых транспортных средств рабочего и инспекционного классов соответственно. Они переходят от одного задания к другому по запрограммированному курсу в ограниченные промежутки времени без физического соединения с надводным судном поддержки. Однако им необходимо совершать частые заходы на поверхность или в подводный гараж для заряда аккумулятора; им также требуются аккумуляторы большой емкости для достаточного срока работы между повторными зарядами. Для загрузки инструкций на автономные подводные транспортные средства и автономные инспекционные транспортные средства, а также для загрузки информации с них, обычно используют беспроводное соединение для передачи данных.
Также известны гибридные дистанционно управляемые транспортные средства: они могут работать как автономно, наподобие автономных подводных транспортных средств, так и через физическое соединение с судном поддержки, наподобие дистанционно управляемых транспортных средств.
Во избежание необходимости выполнения беспилотным подводным транспортным средством длительного подъема на поверхность при необходимости замены инструментов или датчиков, набор инструментов или датчиков может храниться в размещающей корзине, которая опущена в подходящее место, так что беспилотное подводное транспортное средство может забирать и присоединять подходящий инструмент или датчик к самому себе, когда это необходимо.
Выбранный инструмент или датчик могут удерживать и им могут манипулировать посредством рабочего органа манипулятора беспилотного подводного транспортного средства, для этого инструмент или датчик может иметь рукоятку, которая имеет форму для удерживания посредством захвата на рабочем органе манипулятора. Разумеется, этот вариант заменяет установку инструмента или датчика на корпусе или другой конструкции беспилотного подводного транспортного средства, или встраивание в беспилотное подводное транспортное средство.
Выполнение заданий по проверке, контролю, обслуживанию и строительству занимает значительное время. В это время беспилотные подводные транспортные средства должны оставаться на месте для поддержки, управления и подачи энергии инструментам или датчикам, которые они используют. Это задерживает беспилотные подводные транспортные средства и делает их недоступными для других заданий.
В результате проект может быть продлен или может потребовать использования дополнительных беспилотных подводных транспортных средств, если возможно использование множества беспилотных подводных транспортных средств. Оба результата требуют больших затрат. В частности, задержка беспилотного подводного транспортного средства, которое зависит от судна поддержки, в частности дистанционно управляемого транспортного средства, которое остается связанным с судном, задерживает также и судно. Стоимость работы судов поддержки может достигать сотен тысяч долларов США в день. Кроме того, так как суда поддержки могут стоить десятки миллионов долларов США при капитальных затратах, любые отсрочки заблокируют имеющий ценность капитальный актив.
Несколько патентных заявок описывают, каким образом дистанционно управляемое транспортное средство может быть связано с подводным блоком, таким как блок питания, система управления кабелем или подводным гаражом. Примеры раскрыты в US 3880103, GB 2453645, WO 0121476, WO 0121478 и WO 0121479. В свою очередь, в документах US 2012289103 и WO 02/084217 раскрыты беспроводные автономные подводные транспортные средства.
В WO 0153149 описана размещающая корзина, которая переносит основное рабочее дистанционно управляемое транспортное средство и малое дистанционно управляемое транспортное средство и имеет соответствующие системы управления кабелем. Основное дистанционно управляемое транспортное средство и малое дистанционно управляемое транспортное средство могут взаимодействовать для выполнения заданий, или одно дистанционно управляемое транспортное средство может помогать в освобождении другого в случае проблемы, такой как запутывание. Кроме того, если возникает проблема с основным дистанционно управляемым транспортным средством, может быть продолжено выполнение некоторых функций малым дистанционно управляемым транспортным средством в качестве резервного устройства до тех пор, пока основное дистанционно управляемое транспортное средство не сможет быть заменено или починено. Однако это дорогостоящий подход, который нежелательно увеличивает общее количество используемых в проекте дистанционно управляемых транспортных средств. Кроме того, вследствие связывания дистанционно управляемых транспортных средств посредством кабелей с совместно используемой размещающей корзиной, обостряется проблема, заключающаяся в том, что дистанционно управляемые транспортные средства должны оставаться на месте стоянки, так как оба дистанционно управляемых транспортных средства должны закончить назначенные им задания до того, как оба дистанционно управляемых транспортных средства могут покинуть место стоянки.
В WO 2009061562 раскрыта система для подводной работы, в которой множество беспроводных автономных подводных транспортных средств взаимодействуют с центральной доковой станцией. Автономные подводные транспортные средства периодически возвращаются к доковой станции для изменения программы и для заряда аккумуляторов. Доковая станция освобождает судно поддержки от необходимости оставаться на месте на поверхности. Однако так как различные автономные подводные транспортные средства используются для различных заданий, система, описанная в WO 2009061562, является сложной, дорогой и неадаптивной.
В US 5947051 описано самоходное "примыкающее к поверхности" подводное автоматизированное транспортное средство. Указанное транспортное средство может самостоятельно передвигаться в воде для прикрепления к подводной конструкции. Транспортное средство может затем перемещаться по этой конструкции для выполнения различных заданий. Инструменты и устройства для измерения и проверки переносятся транспортным средством по мере необходимости для требуемых заданий. Кроме того, может быть очищена огороженная область для обеспечения сухой среды для завершения заданий под водой, таких как очистка и сварка корпуса. Однако транспортное средство, описанное в US 5947051, является громоздким и дорогостоящим: являясь, по существу, дистанционно управляемым транспортным средством с дополнительными способностями к медленному перемещению по поверхности и расположенными на борту инструментами и датчиками, оно задерживает дистанционно управляемое транспортное средство (то есть само себя) до тех пор, пока оно не выполнит задание, которую оно запрограммировано выполнить.
В WO 2013040296 описан автономный узел, который обменивается данными с дистанционно управляемым транспортным средством, и заряжается посредством него. Однако данный узел не может быть развернут дистанционно управляемым транспортным средством: он должен переноситься и развертываться с помощью надводного судна.
Известна установка и извлечение подводных управляющих модулей коллекторов или устьев скважин посредством дистанционно управляемых транспортных средств. Однако назначением таких модулей не является выполнение задания по проверке, контролю, обслуживанию или строительству на подводной конструкции: они не могут рассматриваться как инструменты или датчики, выполненные для данного назначения. Кроме того, такие модули не являются автономными, так как они должны быть соединены с источником питания на поверхности посредством приспособления для связи.
Также известны малые автономные подводные блоки с автономным питанием, такие как приемопередатчики и сигнальные буи. Хотя они обычно являются переносимыми посредством беспилотного подводного транспортного средства, такие блоки обычно взаимодействуют с надводным судном, а не с беспилотным подводным транспортным средством, которое их переносит. Кроме того, такие модули и блоки не являются инструментами или датчиками, которые выполнены с возможностью выполнения конкретного задания по проверке, контролю, обслуживанию или строительству на подводной конструкции, такой как трубопровод.
В WO 2013046577 описано подводное транспортное средство, имеющее рабочий орган, который переносит блок для контроля подводной конструкции. Подводное транспортное средство и блок образуют узел и остаются в таком виде в течение всего времени, когда узел погружен. Транспортное средство остается прикрепленным к блоку, пока она производит контроль подводной конструкции.
В WO 0198140 описано подводное транспортное средство, которое может быть как пилотируемым, так и беспилотным. Также описана ходовая часть. Ходовая часть может быть выполнена в виде землеройной машины и иметь несколько конусов для обеспечения направляющих образований, а также передачу питания и данных от транспортного средства к ходовой части. Обычно ходовая часть остается на дне. Когда необходимо проведение механических работ, таких как земляные работы, транспортное средство соединяется с ходовой частью для управления ею. После завершения работ, транспортное средство удаляют с ходовой части, которая остается на дне до тех пор, пока работы не понадобятся в будущем.
В JPH 08145733 описано подводное транспортное средство, которое соединено с судном-базой посредством кабеля, с помощью которого управляют транспортным средством. Транспортное средство переносит блок во время спуска от судна-базы на дно. Оптоволоконный кабель соединяет транспортное средство с блоком. Когда транспортное средство достигает дна, оптоволоконный кабель отделяют для отсоединения блока от транспортного средства. На блоке обеспечены камера и освещение для выполнения наблюдения, пока блок расположен неподвижно на дне. Плавучесть транспортного средства повышается вследствие отсоединения от блока, так что транспортное средством всплывает к судну-базе. Соответственно, после отсоединения транспортное средство больше не является доступным под водой для каких-либо заданий под водой. Кроме того, транспортное средство больше не имеет сообщения с блоком после отделения оптоволоконного кабеля. Для подъема блока посылают сигнал с судна-базы на блок для высвобождения груза для повышения плавучести блока.
На фоне вышесказанного было разработано настоящее изобретение.
Согласно одной особенности, изобретение заключается в способе выполнения заданий по проверке, контролю, обслуживанию или строительству на подводной конструкции. Способ включает: перемещение подводного транспортного средства для переноса погружного блока, содержащего инструмент или датчик, к подводной конструкции; передачу блока от подводного транспортного средства так, чтобы он закреплялся на подводной конструкции; и выполнение задания на подводной конструкции с использованием инструмента или датчика, содержащегося в блоке, с питанием от бортового источника питания блока, пока блок размещен на подводной конструкции, а подводное транспортное средство находится на расстоянии от блока, с тем чтобы оставаться доступным под водой для выполнения, наблюдения или управления другим заданием под водой.
Подводное транспортное средство может находиться на расстоянии от блока, с тем чтобы оставаться доступным под водой для обмена информацией с блоком.
Подводное транспортное средство может находиться на расстоянии от блока, с тем чтобы оставаться доступным под водой для обеспечения питания блока.
Бортовой блок питания может питаться, заряжаться или заправляться от внешнего источника питания, пока блок размещен на подводной конструкции. Однако инструмент или датчик может питаться от бортового блока питания, пока блок не соединен с внешним источником питания.
Программа подходящим образом выполняется на борту блока, или блоком управляют другим способом, для выполнения задания автономным или полуавтономным по отношению к подводному транспортному средству образом. Предпочтительно блок является по меньшей мере частично самоуправляемым для выполнения задания.
Данные могут передаваться между блоком и подводным транспортным средством, пока подводное транспортное средство находится на расстоянии от блока. В данном случае подводное транспортное средство может передавать данные от блока в подходящую место приема. Кроме того, возможно, чтобы данные содержали управляющие сигналы, посылаемые от подводного транспортного средства к указанному блоку.
Блок может быть перемещен относительно подводной конструкции будучи размещенным на подводной конструкции после его перемещения от подводного транспортного средства. Предпочтительно блок перемещается относительно подводной конструкции своим ходом.
После завершения или прерывания задания блок может быть перемещен от подводной конструкции на подводное транспортное средство. Затем подводное транспортное средство может быть перемещено так, чтобы перенести блок в место, в котором блок хранят, или заряжают, или заправляют, или загружают данные с блока. После того как блок заряжен или заправлен, его могут переносить к подводной конструкции для выполнения другого задания на данной конструкции. После перемещения блока от подводного транспортного средства, его могут прикреплять к монтажной конструкции, такой как рельс или держатель, ранее прикрепленной к подводной конструкции. Рельс представляет собой пример монтажной конструкции, которая обеспечивает возможность перемещения блока по монтажной конструкции относительно подводной конструкции, после прикрепления к монтажной конструкции.
Изобретательский замысел охватывает погружной блок, который выполнен с возможностью прикрепления к подводной конструкции и является зависимым от подводного транспортного средства в отношении перемещения в воде к подводной конструкции. Блок согласно настоящему изобретению содержит: инструмент или датчик, выполненный с возможностью выполнения задания по проверке, контролю, обслуживанию или строительству на подводной конструкции; бортовой блок питания, выполненный с возможностью питания инструмента или датчика для выполнения задания; бортовое управляющее устройство, выполненное с возможностью управления инструментом или датчиком для выполнения задания.
Блок соответствующим образом также содержит прикрепляющее оборудование для прикрепления блока к подводной конструкции и/или к подводному транспортному средству. Блок предпочтительно также содержит бортовую прикрепляющую и высвобождающую систему, которая выполнена с возможностью приведения в действие прикрепляющего. Управляющее устройство запрограммировано соответствующим образом для управления инструментом или датчиком для выполнения задания автономным или полуавтономным образом относительно основного подводного транспортного средства.
Блок согласно настоящему изобретению может также содержать бортовую приводную систему, выполненную с возможностью работы на подводной конструкции, к которой прикреплен блок, для перемещения блока относительно данной конструкции при выполнении задания или заданий в различных местах на конструкции.
Блок согласно настоящему изобретению может также содержать бортовой модуль ввода/вывода, выполненный с возможностью передачи данных на внешний приемник и/или приема командных сигналов от внешнего управляющего устройства.
Изобретательский замысел распространяется на систему для выполнения задания по проверке, контролю, обслуживанию или строительству на подводной конструкции. Система согласно настоящему изобретению содержит: погружной блок по настоящему изобретению; подводное транспортное средство, выполненное с возможностью перемещения для переноса блока к подводной конструкции; и перемещающее устройство для перемещения блока от подводного транспортного средства так, чтобы он закреплялся на подводной конструкции, вследствие чего подводное транспортное средство имеет возможность перемещения, оставаясь под водой так, чтобы находиться на расстоянии от блока, пока обеспечено размещение блока на подводной конструкции для выполнения инструментом или датчиком блока задания на подводной конструкции.
Например, блок могут переносить к подводной конструкции посредством манипулятора подводного транспортного средства. Такой манипулятор может служить в качестве перемещающего устройства системы.
Система согласно настоящему изобретению может дополнительно содержать размещающее устройство для погружения блока отдельно от подводного транспортного средства, причем из указанного устройства подводное транспортное средство может забирать блок под водой для переноса блока к подводной конструкции.
Кратко формулируя настоящее изобретение, задание по проверке, контролю, обслуживанию и строительству выполняют на подводной конструкции посредством использования подводного транспортного средства для переноса погружного блока к подводной конструкции. Блок содержит инструмент или датчик, выполненные с возможностью выполнения требуемого задания на подводной конструкции, и бортовой блок питания и управляющее устройство, выполненные с возможностью питания и управления инструментом или датчиком, и другие необязательные системы блока.
Блок перемещают от подводного транспортного средства так, чтобы он закреплялся на подводной конструкции. Подводное транспортное средство затем может находиться на расстоянии от блока и выполнять другие задания, хотя транспортное средство может некоторое время сохранять отношение "ведущий-ведомый" с блоком. Пока блок размещен на подводной конструкции, инструмент или датчик блока выполняет требуемую задание на подводной конструкции, при питании и управлении бортовым источником питания и управляющим устройством блока.
Принцип настоящего изобретения заключается в том, что блоки инструментального и обрабатывающего оборудования с автономным питанием и с автономной работой могут быть размещены на подводной конструкции посредством беспилотного подводного транспортного средства, как посредством стандартного дистанционно управляемого транспортного средства, так и посредством автономного беспилотного подводного транспортного средства, такого как автономное подводное транспортное средство. Беспилотное подводное транспортное средство затем находится на расстоянии, пока размещенный блок работает. Однако беспилотное подводное транспортное средство может оставаться задействованным в управлении, контроле или обслуживании блока, пока блок выполняет поставленную задание на подводной конструкции.
Блоки инструментального и обрабатывающего оборудования в соответствии с изобретением могут содержать стандартные инструментальные или датчиковые системы, например инструменты, совершающие вращение, или блоки давления, температурные блоки, блоки катодной защиты или блоки взятия пробы из окружающей среды. Блоки могут также содержать: механизм для прикрепления к размещающему транспортному средству; механизм для прикрепления к конструкции, которое может также служить в качестве механизма для прикрепления к размещающему транспортному средству; автономное питание и компьютерное управление; систему передачи данных; самоходный механизм, если требуется; и очищающее оборудование, при необходимости, для развертывания датчика или для использования инструмента.
Один или более блоков могут быть прикреплены или другим образом поддерживаться беспилотным подводным транспортным средством на поверхности, а затем перенесены посредством беспилотного подводного транспортного средства под воду. Затем беспилотное подводное транспортное средство может разместить блок (блоки) на соответствующей подводной конструкции и, после использования, забрать и возвратить их на поверхность или другое требуемое место. В альтернативном варианте один или более блоков могут быть размещены на дне отдельно от беспилотного подводного транспортного средства, например в размещающей корзине. Затем беспилотное подводное транспортное средство может причалить к размещающей корзине и забрать блок (блоки) из нее, разместить блок (блоки) на соответствующей подводной конструкции и, после использования, забрать и возвратить их в размещающую корзину.
Блоки согласно настоящему изобретению могут, например, быть прикреплены к беспилотному подводному транспортному средству или другой размещающей системе при помощи механического стыковочного узла или электромагнита, или могут удерживаться в манипуляторе или другой конструкции беспилотного подводного транспортного средства.
При использовании системы согласно изобретению беспилотное подводное транспортное средство доставляет и прикрепляет блок к подводной конструкции с использованием устройства для захвата, которое может находиться на самом блоке и/или на конструкции. После использования активируют высвобождающий механизм, предпочтительно посредством беспилотного подводного транспортного средства, для забора блока и его возврата в размещающую корзину или на поверхность. Как и в предыдущем случае, высвобождающий механизм может быть выполнен на блоке и/или на конструкции.
После размещения основным подводным транспортным средством на подводной конструкции, беспилотное подводное транспортное средство удаляется и остается доступным под водой для выполнения, наблюдения или управления другим заданием под водой. Блок будет выполнять назначенное задание предпочтительно автономным или полуавтономным образом по отношению к беспилотному подводному транспортному средству. Степень автономности блока зависит от устройств, выполненных для питания и управления блоком, когда он находится в нужном месте на подводной конструкции, отдельно от физической поддержки беспилотного подводного транспортного средства, которое переносило его к конструкции.
Что касается питания, блок может работать полностью автономно, если он выполнена с автономным питанием, по меньшей мере пока бортовому или внутреннему источнику питания блока не потребуется заправка. В этом плане блок может работать полуавтономно в отношении питания, если ему необходимо соединяться с внешним источником питания только время от времени для зарядки или заправки внутреннего источника питания, такого как аккумулятор, например посредством кабеля питания, проходящего к беспилотному подводному транспортному средству, или даже к другому внешнему источнику питания, такому как может быть обеспечен на подводной конструкции, или вблизи нее.
Предпочтительно зарядка или заправка бортового источника питания блока может быть проведена, пока блок размещен на подводной конструкции. Однако дополнительно или в качестве альтернативы возможно, чтобы беспилотное подводное транспортное средство отсоединило блок от подводной конструкции и перенесло его в другое место для зарядки или заправки, такое как оборудованный подходящим образом подводный гараж или размещающую корзину.
Также возможно, чтобы блок работал не автономным в плане питания образом, оставаясь соединенным с внешним источником питания во время выполнения назначенного задания. Однако, если внешний источник питания представляет собой беспилотное подводное транспортное средство, такое соединение посредством кабеля может нежелательным образом ограничить перемещение, и таким образом параллельную функциональность беспилотного подводного транспортного средства.
В плане управления, если работа является полностью автономной, блок может выполнять назначенную задание по существу без внешних управляющих входных данных от беспилотного подводного транспортного средства или других источников. Однако внешний пусковой сигнал от беспилотного подводного транспортного средства или другого внешнего управляющего устройства мог, например, быть использован для запуска, остановки или паузы запрограммированного алгоритма работы, который блок может выполнять для выполнения задания без необходимости внешних управляющих входных данных во время данного алгоритма работы.
Если работа является полуавтономной в плане управления, блок может выполнять свою задание, притом что часть его работы, но не вся, определена внешними управляющими сигналами. Например, блок может быть запрограммирован для исполнения различных вспомогательных алгоритмов работы без необходимости внешних управляющих входных данных во время данных вспомогательных алгоритмов работы. Однако, если и когда может быть необходимо выполнить конкретный вспомогательный алгоритм работы, блок передает свой статус на внешнее управляющее устройство и ждет подходящего пускового сигнала от внешнего управляющего устройства для запуска соответствующего вспомогательного алгоритма работы. Внешнее управляющее устройство может быть расположено на беспилотном подводном транспортном средстве, расположено где-либо на подводной конструкции или вблизи нее, или расположено на поверхности под управлением человека -оператора.
Так как в большой степени оборудование, обеспечивающее автономность, такое как автономное питание и бортовое управление, предпочтительно встроено в блок, а не в основное беспилотное подводное транспортное средство, это устраняет необходимость того, чтобы беспилотное подводное транспортное средство оставалось поблизости, пока производят измерения датчиком или выполняют другие операции на подводной конструкции посредством блока. Беспилотное подводное транспортное средство также может быть свободным, если питание для контейнера и/или управление им обеспечено из другого внешнего источника на подводной конструкции или вблизи нее. Также возможна и неавтономная в плане управления работа, при которой управляющие входные данные определяют по существу всю работу блока. Такие входные данные могут быть обеспечены беспилотным подводным транспортным средством, пока оно находится на расстоянии и доступно для других заданий, или другим внешним управляющим устройством, расположенным на подводной конструкции, или вблизи нее, или на поверхности.
Таким образом, беспилотное подводное транспортное средство может быть использовано в качестве "главного" подводного передатчика питания и/или данных для управления одного или более "подчиненных" блоков, например блока с функцией контроля или датчиковой функцией. Таким образом, беспилотное подводное транспортное средство свободно для выполнения других заданий, благодаря чему минимизируется задержка беспилотного подводного транспортного средства и какого-либо надводного судна поддержки. Затем основное беспилотное подводное транспортное средство, или другое беспилотное подводное транспортное средство, возвращается и забирает блок для хранения и обслуживания, например для загрузки данных и зарядки аккумулятора перед повторным использованием. Так как блок обычно является небольшим и таким образом имеет малые аккумуляторы и место для хранения по сравнению с беспилотным подводным транспортным средством, он имеет ограниченную автономность и другие возможности по сравнению например с автономным подводным транспортным средством. В частности, блок не обязательно должен быть выполнен самоходным в воде, и таким образом может не содержать двигатель или связанные двигательные системы и системы питания, которыми отличается беспилотное подводное транспортное средство.
Для более легкого понимания настоящего изобретения, в качестве примера приведена ссылка на прилагаемые чертежи, на которых:
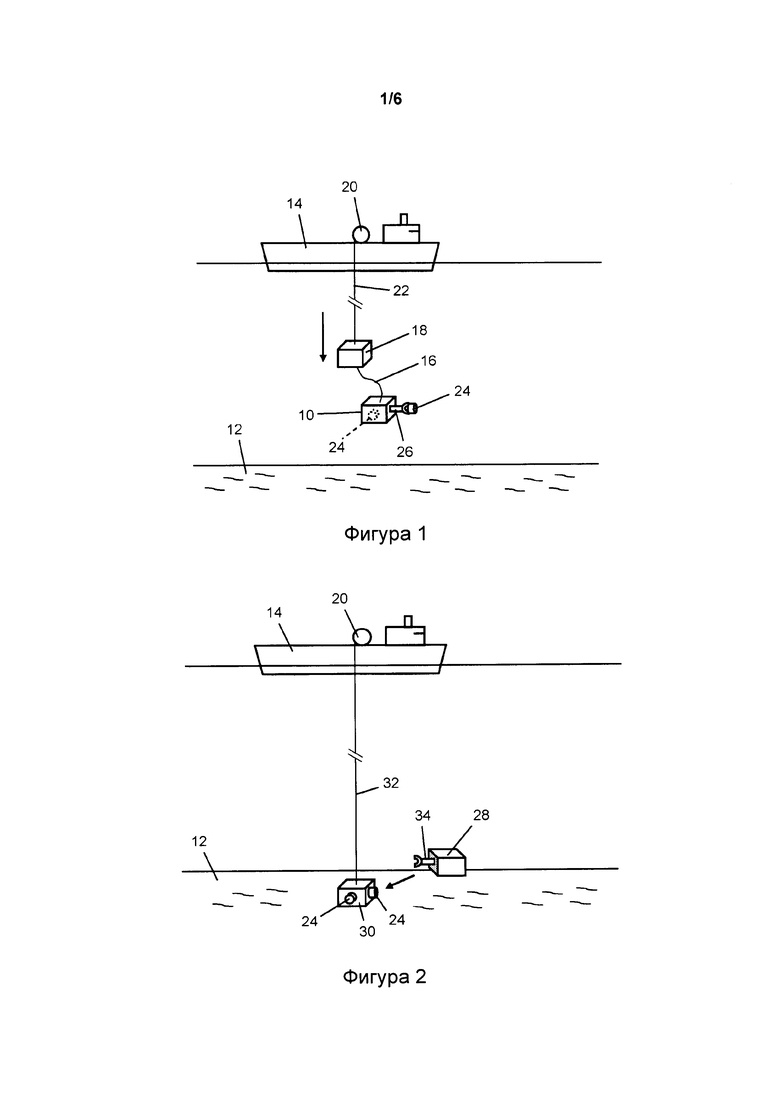
на фиг. 1 показан схематичный вид в перспективе дистанционно управляемого транспортного средства, подвешенного на надводном судне поддержки, спущенного ко дну, при этом оно переносит один или более автономных блоков в соответствии с настоящим изобретением;
на фиг. 2 показан схематичный вид в перспективе автономного подводного транспортного средства, перемещающегося для взаимодействия с размещающей корзиной, спущенной от надводного судна поддержки на дно, причем корзина переносит множество автономных блоков в соответствии с настоящим изобретением;
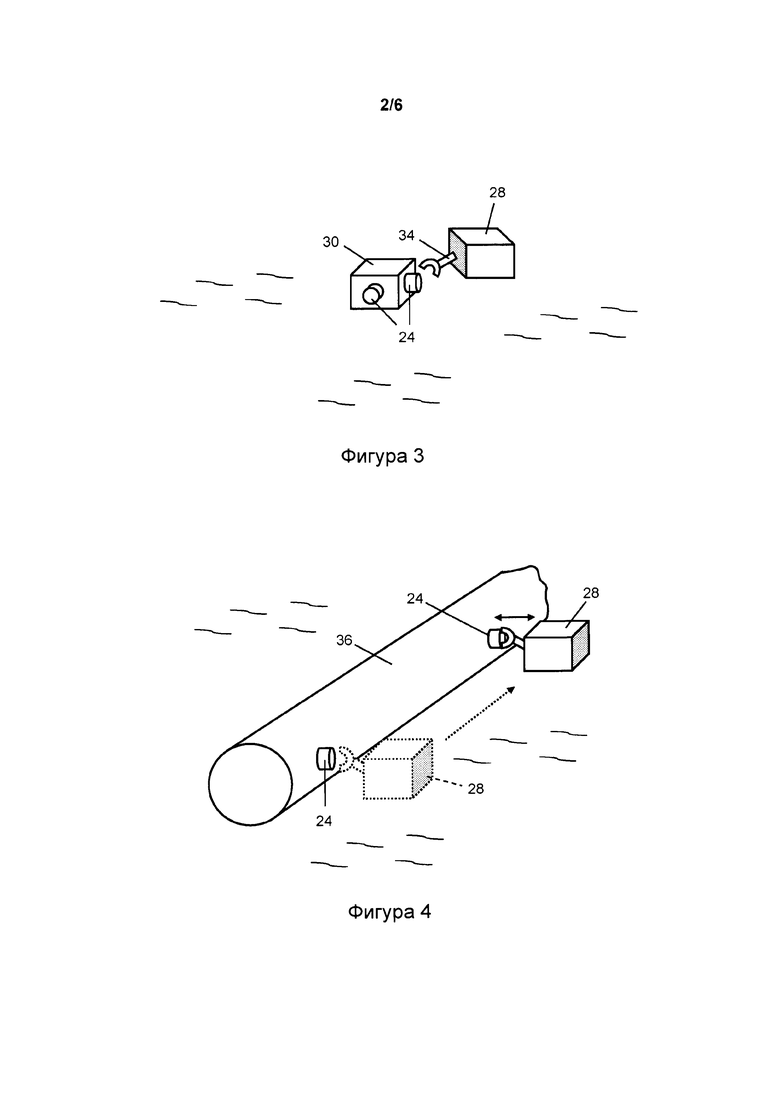
на фиг. 3 показан увеличенный схематичный вид в перспективе автономного подводного транспортного средства по фиг. 2, которое собирается захватить один или более блоков из размещающей корзины на дне;
на фиг. 4 показан схематичный вид в перспективе подводной конструкции, к которой автономное подводное транспортное средство по фиг. 2 прикрепляет или с которой автономное подводное транспортное средство удаляет два блока, захваченные из размещающей корзины;
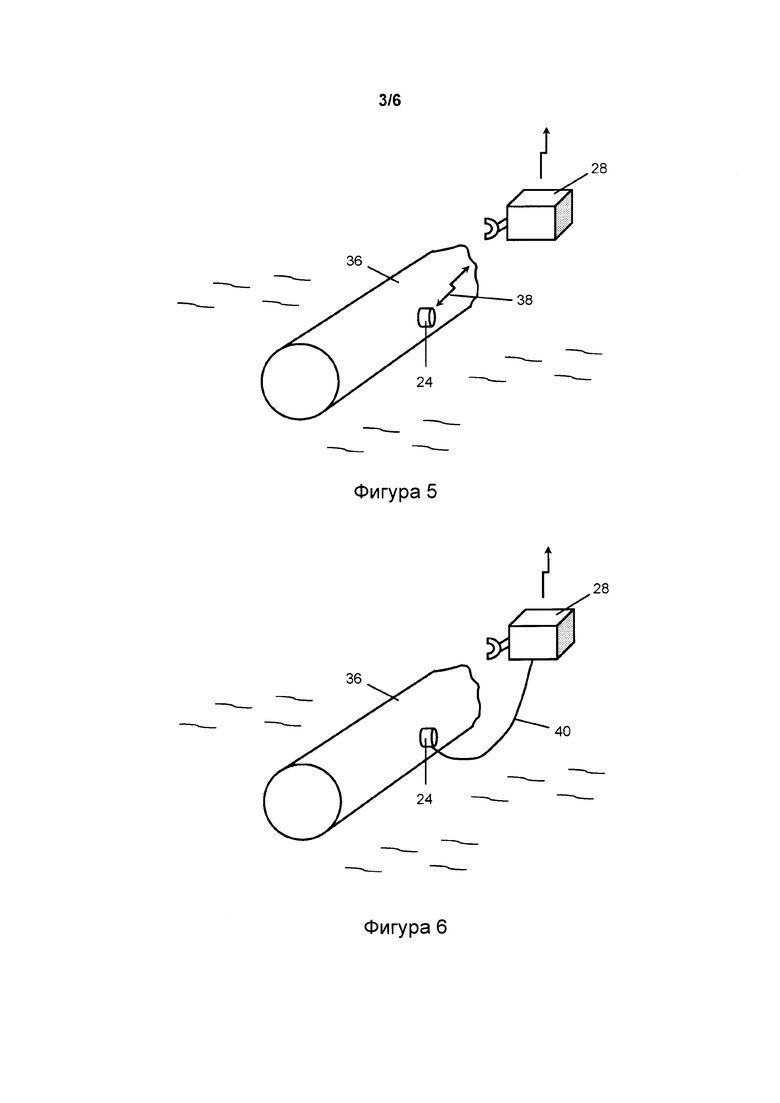
на фиг. 5 показан схематичный вид в перспективе, на котором показана беспроводная передача данных между блоком, прикрепленным к подводной конструкции, и автономным подводным транспортным средством, удаленным от блока;
на фиг. 6 показан схематичный вид в перспективе соответствующий фиг. 5, но на котором показан альтернативный вариант проводной передачи данных между блоком и автономным подводным транспортным средством;
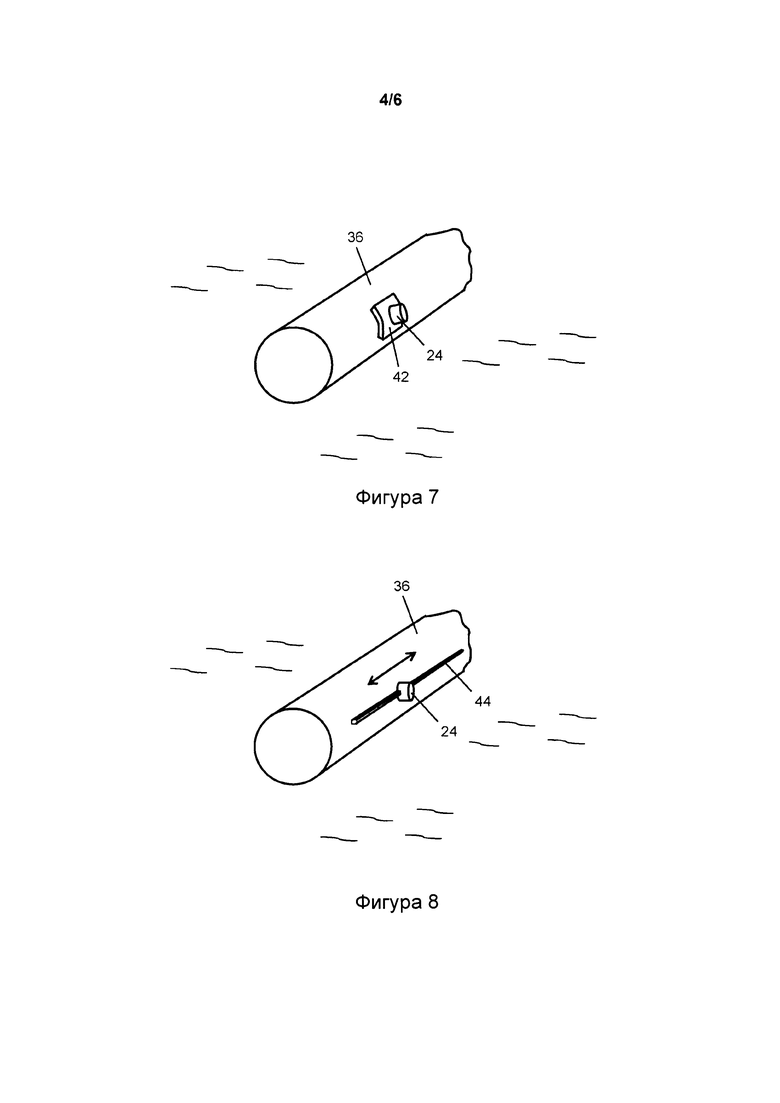
на фиг. 7 показан схематичный вид в перспективе, на котором показан автономный блок в соответствии с настоящим изобретением, прикрепленный к подводной конструкции посредством заранее выполненного соединительного держателя, обеспеченного на конструкции;
на фиг. 8 показан схематичный вид в перспективе, на котором показан автономный блок в соответствии с настоящим изобретением, прикрепленный к подводной конструкции посредством рельса, вдоль которого блок может перемещаться по конструкции;
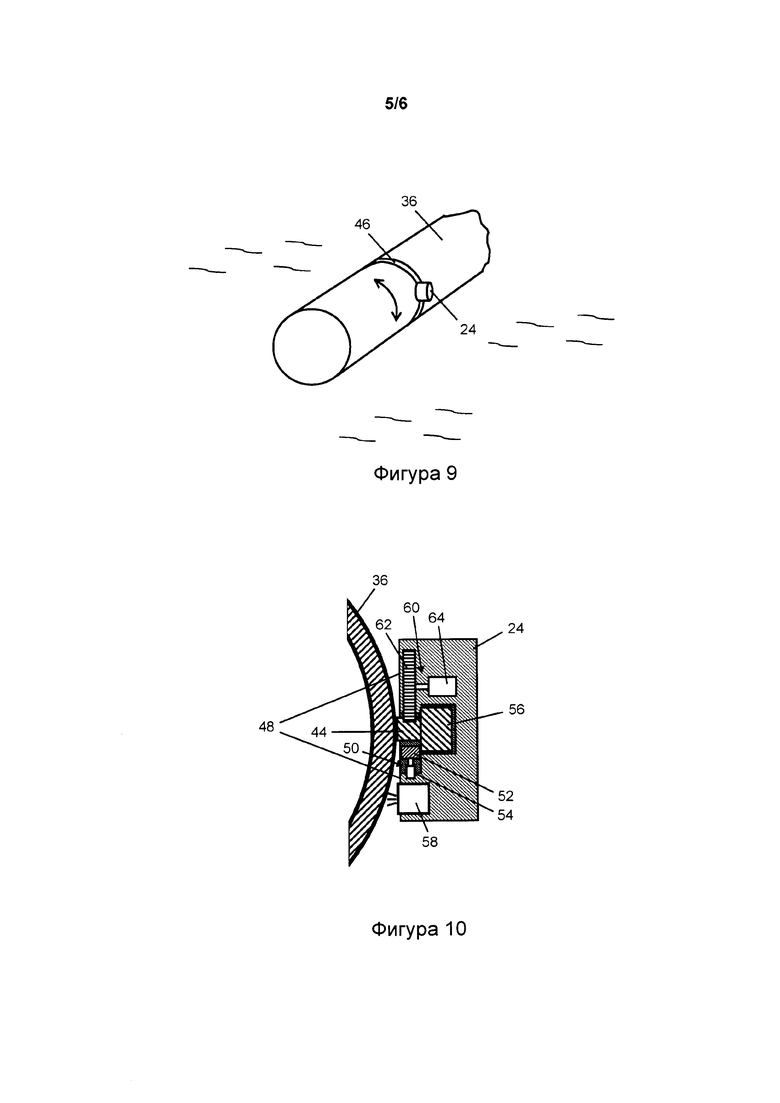
на фиг. 9 показан схематичный вид в перспективе, на котором показан автономный блок в соответствии с настоящим изобретением, прикрепленный к подводной конструкции посредством полосы, вдоль которой блок может перемещаться вокруг конструкции;
на фиг. 10 показан схематичный вид в разрезе блока, рельса и подводной конструкции, показанных на фиг. 8; и
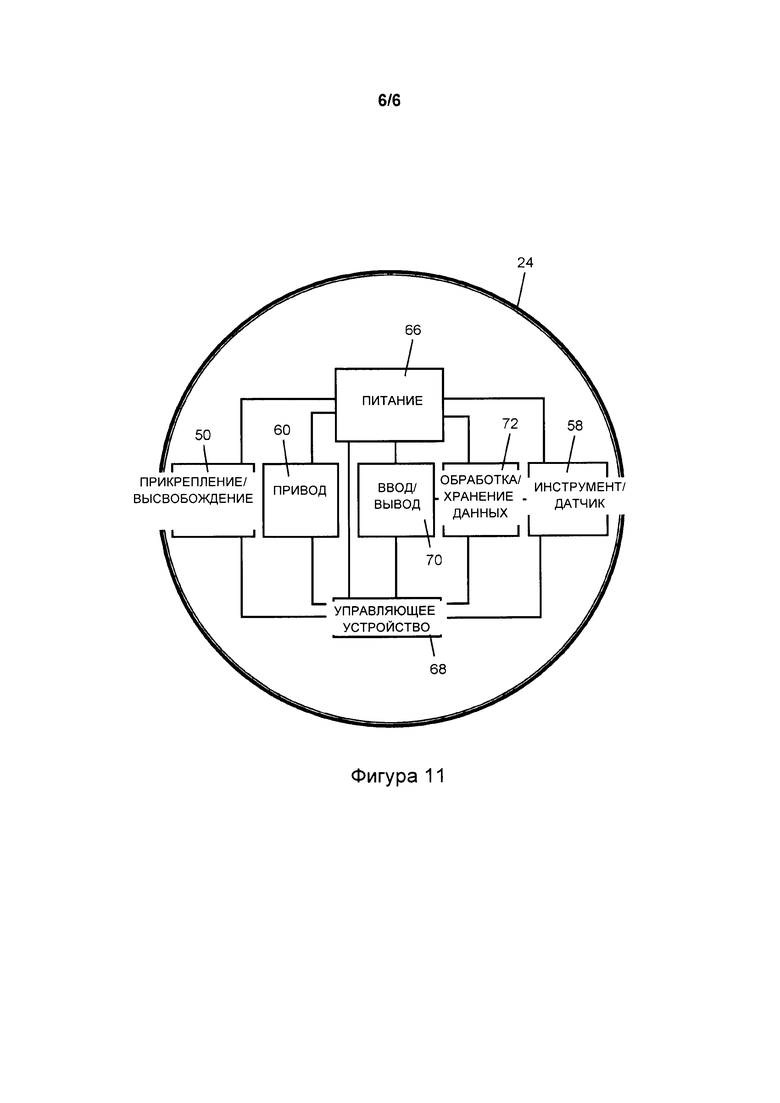
на фиг. 11 показана блок-схема основных систем, содержащихся в автономном блоке в соответствии с настоящим изобретением.
На фиг. 1 чертежей показан первый вариант реализации настоящего изобретения в контексте дистанционно управляемого транспортного средства 10, спускаемого в направлении дна 12 с надводного судна 14 поддержки. Дистанционно управляемое транспортное средство 10 обычным образом соединено кабелем 16 с системой 18 управления кабелем, которая подвешена на лебедке 20 на судне 14 посредством усиленного троса.
Дистанционно управляемое транспортное средство 10 берет электрическую энергию от судна 14 посредством кабеля 16 и троса 22. Двунаправленные сигналы данных, включая управляющие сигналы и видеосигналы, следуют тем же маршрутом между судном 14 и дистанционно управляемым транспортным средством 10.
В соответствии с настоящим изобретением дистанционно управляемое транспортное средство 10 переносит один или более блоков 24 оборудования с выполнением функций инструмента и/или датчика. На фиг. 1 один из данных блоков 24 показан удерживаемым в рабочем органе манипулятора 26 дистанционно управляемого транспортного средства 10 во время перемещения ко дну 12. Для этого блок 24 может быть обеспечен рукояткой, имеющей форму для ее захвата дистанционно управляемым транспортным средством 10. Такая рукоятка может иметь любую известную форму, такую как форма "рыбий хвост", и поэтому не показана на чертежах для ясности. Кроме того, или в качестве альтернативы возможно, чтобы один или более блоков 24 аппаратуры размещались в другом месте на дистанционно управляемом транспортном средстве 10. Для того чтобы это продемонстрировать, на фиг. 1 пунктирными линиями показан другой блок 24, прикрепленный к корпусу дистанционно управляемого транспортного средства 10 посредством разъемного соединения, такого как механическое соединительное приспособление или электромагнит. Соединение может приводиться в действие как посредством блока 24, так и посредством дистанционно управляемого транспортного средства 10, когда блок 24 необходимо присоединить или отсоединить.
На фиг. 2 и 3 показан второй вариант реализации настоящего изобретения в контексте автономного подводного транспортного средства 28. На фиг. 2 автономное подводное транспортное средство 28 показано в процессе перемещения в направлении размещающей корзины 30, которую спустили ко дну 12 на тросе 32, свешенного с лебедки 20 на надводном судне 14 поддержки. Разгрузочная корзина 30 переносит один или более (в данном простом примере - два) автономных блока 24 в соответствии с настоящим изобретением. На фиг. 3 трос 32 отсоединен от корзины 30, и рабочий орган 34 манипулятора автономного подводного транспортного средства 28 собирается захватить один или более блоков 24 для удаления их из корзины 30. Как и в предыдущем случае, блок 24 может иметь рукоятку, имеющую форму для ее захвата автономным подводным транспортным средством 28, но она не показана на чертежах для ясности.
Автономное подводное транспортное средство 28 затем переносит блок 24 из корзины 30 к подводной конструкции для выполнения заданий, таких как проверка, контроль или обслуживание, как будет описано ниже со ссылкой на фиг. 4-6. На фиг. 4-6 также показан пример автономного подводного транспортного средства 28. Однако следует понимать, что различные беспилотные подводные транспортные средства, такие как дистанционно управляемое транспортное средство 10 по фиг. 1, могут быть использованы вместо автономного подводного транспортного средства 28. Кроме того, автономное подводное транспортное средство 28 может переносить один или более блоков 24, прикрепленных к его корпусу таким же образом, как показан для дистанционно управляемого транспортного средства 10 по фиг. 1.
Затем, обращаясь теперь к фиг. 4, автономное подводное транспортное средство 28 показано в процессе прикрепления блока 24 к подводной конструкции, показанной в настоящем примере как трубопровод 36. В данном примере автономное подводное транспортное средство 28 уже прикрепило блок 24 в другом месте на трубопроводе 36 до того, как вернуться, при необходимости, к размещающей корзине 30, с тем чтобы забрать другой блок 24. Это описано для того, чтобы показать, что одно автономное подводное транспортное средство 28 может установить более чем один блок 24, а затем взаимодействовать с ними и затем удалить их. Однако возможно, чтобы автономное подводное транспортное средство 28 установило только один блок 24, взаимодействовало с ним и удалило его. Для простоты взаимодействие с отдельным блоком 24 после его установки описано со ссылкой на фиг. 5-9.
На фиг. 5 и 6 показано автономное подводное транспортное средство 28, удаленное от блока 24 после прикрепления блока 24 к трубопроводу 36. После того как блок 24 прикреплен к трубопроводу 36, он может выполнять задания на трубопроводе 36, которые заранее запрограммированы и/или находятся под управлением или надзором автономного подводного транспортного средства 28. Например, блок 24 может проводить чистку или другие процедуры на трубопроводе 36 перед измерением параметра трубопровода 36, такого как его толщина, с использованием датчика, такого как прибор для ультразвуковой диагностики. В качестве альтернативы блок 24 может выполнять функции инструмента, например бура или другого режущего устройства для срезания покрытия на трубопроводе 36 при готовности к последующим строительным операциям. Тем временем автономное подводное транспортное средство 28 свободно для выполнения других заданий, хотя оно может продолжать непрерывный или прерывистый двунаправленный обмен данными с блоком 24 посредством беспроводной линии 38 связи, как показано на фиг. 5, или посредством кабель-тросового соединения 40, как показано на фиг. 6. Передаваемые данные могут содержать управляющие сигналы от автономного подводного транспортного средства 28 блоку 24 и сигналы обратной связи и сигналы датчика от блока 24 автономному подводному транспортному средству 28. Сигналы, принятые автономным подводным транспортным средством 28 от блока 24, могут передаваться непрерывно или с перерывами от автономного подводного транспортного средства 28 в подходящую место приема под водой или на поверхности. При необходимости сигналы, принятые автономным подводным транспортным средством 28, могут храниться в памяти на автономном подводном транспортном средстве 28 или быть предварительно обработаны на нем для последующей загрузки, например, когда автономное подводное транспортное средство 28 возвращено в подводный гараж или на поверхность для зарядки или перепрограммирования.
В сравнении с беспроводным соединением 38 по фиг. 5 проводное соединение, как показано на фиг. 6, имеет преимущество в том, что оно имеет возможность питания или заряда блока 24 от автономного подводного транспортного средства 28. Однако проводное соединение также имеет недостаток в виде ограничения перемещения автономного подводного транспортного средства 28 при сохранении соединения, или в виде необходимости устанавливания и прерывания соединения, если соединение должно быть прерывистым.
В простых примерах, показанных на фиг. 4-6, блоки 24 прикреплены к трубопроводу 36 без необходимости адаптации трубопровода 36. Для этого блоки 24 могут содержать рабочие органы, выполненные с возможностью охвата, окружения или зажима на трубопроводе 36 или другой подводной конструкции, или накладки, выполненные с возможностью прикрепления к конструкции посредством электромагнетизма или присасывания.
На фиг. 7-10 показано, как подводная конструкция, такая как трубопровод 36, может быть адаптирована для обеспечения возможности или оказания содействия при прикреплении блока 24 согласно настоящему изобретению посредством монтажной конструкции, выполненной с возможностью поддержки блока 24. Такая адаптация может быть выполнена при производстве конструкции или после установки, например посредством беспилотного подводного транспортного средства, которое впоследствии устанавливает блок 24.
В качестве примера на фиг. 7 показан держатель 42 как пример опорного приспособления для блока, который подходящим образом прикреплена к трубопроводу 36 при производстве для определения удобного места прикрепления блока 24. Держатель 42 и блок 24 подходящим образом имеют дополняющие образования, выполненные с возможностью взаимодействия друг с другом, для разъемного прикрепления блока 24 к держателю 42 и, таким образом, к трубопроводу 36. В данном примере держатель 42 определяет углубление, которое принимает блок 24, хотя возможны другие образования, такие как штифт или шип на держателе 42, которые взаимодействуют с углублением в блоке 24.
Решение с размещением блока, показанное на фиг. 7, является обычным там, где измерения необходимо выполнять периодически во время срока службы трубопровода 36 в известных, заранее запланированных местах. В данном случае блок 24 с датчиком может быть перемещен между различными указанными опорными приспособлениями для контроля состояния трубопровода 36 в различных местах. В качестве альтернативы множество блоков 24 с датчиками может быть установлено параллельно на соответствующих опорных приспособлениях для одновременного контроля состояния трубопровода 36 во множестве мест.
На фиг. 8, 9 и 10 показаны направляющие, которые могут быть прикреплены к трубопроводу 36 для обеспечения возможности перемещения блока 24 относительно трубопровода 36. Направляющая по фиг. 8 и 10 представляет собой рельс 44, который проходит вдоль трубопровода 36, в то время как направляющая по фиг. 9 представляет собой полосу 46, которая проходит вокруг трубопровода 36.
В каждом из случаев направляющая 44, 46 и блок 24 могут иметь дополняющие образования для обеспечения возможности их взаимодействия друг с другом, хотя возможны и другие прикрепляющие системы, такие как магнитные системы. Например, на фиг. 10 показано, что рельс 44 по фиг. 8 может иметь Т-образное сечение так, чтобы быть охваченным С-образным сечением блока 24. Полоса 46 по фиг. 9 может иметь сечение, схожее с рельсом 44 по фиг. 8.
На фиг. 10 схематически показано, как блок 24 может быть выполнен с возможностью прикрепления к направляющей 44, 46 и, таким образом, прикрепления к подводной конструкции, на которой установлена направляющая 44, 46. В данном примере направляющая 44, 46 представляет собой рельс 44 с Т-образным сечением, а блок 24 содержит рабочие органы 48, которые расположены на расстоянии для охвата рельса 44. Прикрепляющий/высвобождающий механизм 50 содержит собачку 52 на одном из рабочих органов 48, которую приводят в действие посредством привода 54 двойного действия для взаимодействия позади увеличенного головного участка 56 рельса 44. Вместо этого для приведения в действие собачки 52 может быть использован привод одиночного действия, действующий против поджима пружиной.
Когда блок 24 прикреплен к направляющей 44, 46, датчиковое бортовое оборудование 58 в блоке 24 приведено в контакт с трубопроводом 36 или по меньшей мере находится вблизи трубопровода 36 так, чтобы быть в чувствительной области. Датчиковое бортовое оборудование 58 может быть заменено или дополнено инструментным бортовым оборудованием при необходимости, таким как чистящая головка или режущее устройство.
На фиг. 10 также схематически показана приводная система 60, которая обеспечивает возможность блока 24 приводиться в движение по отношению к направляющей 44, 46. В данном примере один из рабочих органов 48 блока 24 содержит ведущую шестерню 62, которая, когда собачка 52 взаимодействует с рельсом 44, взаимодействует с образованием в виде зубчатой рейки, проходящим вдоль рельса 44. Приводная система 60 также содержит двигательный/передаточный узел 64, который поворачивает ведущую передачу 62 для продвижения блока 24 в требуемое положение вдоль рельса 44 относительно трубопровода 36. Блок 24 может быть, например, перемещен вдоль рельса 44 последовательно в различные положения для получения последовательных измерений в этих положениях.
Держатели 42 по фиг. 7 и направляющие 44, 46 по фиг. 8 и 9 могут быть прикреплены к трубопроводу 36 на судне или на береговой трубосварочной базе при производстве, или на дне посредством беспилотного подводного транспортного средства после установки. Обращаясь к фиг. 11 чертежей, на данной блок-схеме показаны основные системы, которые содержатся в автономном блоке 24 согласно настоящему изобретению. Бортовой блок 66 питания обеспечивает электрическую (или, если необходимо, гидравлическую) энергию всем остальным системам, включая бортовое управляющее устройство 68, которое подает управляющие сигналы прикрепляющему/высвобождающему механизму 50, приводной системе 60, модулю 70 ввода/вывода и датчиковому/инструментному бортовому оборудованию 58, и принимает ответные сигналы от них. Блок 72 обработки/хранения данных, который также питают посредством блока 66 питания, связан с управляющим устройством 68, модулем 70 ввода/вывода и датчиковым/инструментным бортовым оборудованием 58. Прикрепляющий/высвобождающий механизм 50 блока 24 могут питать электрическим или гидравлическим образом, и он может быть использован для прикрепления блока 24 к подводной конструкции, например с использованием рельсовых или полосных направляющих 44, 46, показанных на фиг. 8 и 9 и также описанных со ссылкой на фиг. 10. Приводную систему 60 блока 24 могут питать электрическим или гидравлическим образом, и она может быть использована для автономного перемещения блока 24 относительно подводной конструкции, когда блок 24 прикреплен к конструкции, например с использованием рельсовых или полосных направляющих 44, 46, показанных на фиг. 8 и 9. Модуль 70 ввода/вывода блока 24 питают электрическим образом для передачи данных на удаленное беспилотное подводное транспортное средство, и приема командных сигналов от него, как беспроводным образом, показанным на фиг. 5, так и посредством проводного соединения, как показано на фиг. 6. Вместо этого может быть использовано внешнее управляющее устройство, не являющееся беспилотным подводным транспортным средством, для приема данных от модуля 70 ввода/вывода, и для передачи ему командных сигналов.
Датчиковое/инструментное бортовое оборудование 58 блока 24 могут питать электрическим образом, в случае инструмента или датчика, и питать гидравлическим или электрическим образом, в случае инструмента. Может быть использовано комбинированное инструментное и датчиковое бортовое оборудование 58, например чистящая головка в совокупности с датчиком. Блок 72 обработки/хранения данных блока 24 питают электрическим образом для обработки и хранения данных, принятых от управляющего устройства 68, модуля 70 ввода/вывода и датчикового/инструментного бортового 58, или которые необходимо на них отправить, по необходимости.
Автономные блоки 24 согласно настоящему изобретению подходят для прикрепления к различным подводным конструкциям, отличным от трубопроводов, таким как фонтанная арматура, коллекторы, монтажные дуги, элементы платформы и корпуса.
Настоящее изобретение не ограничено гидравлическими инструментами: также в автономных блоках 24 согласно настоящему изобретению возможны электрические инструменты.
Множество различных вариантов возможны в пределах изобретательского замысла. Например, дистанционно управляемое транспортное средство 10, как показано на фиг. 1, может быть использовано в совокупности с размещающей корзиной 30, как показано на фиг. 2; в свою очередь, автономное подводное транспортное средство 28 может быть использовано без размещающей корзины 30, показанной на фиг. 1, например, в противоположность, перенося блоки 24 с поверхности наподобие дистанционно управляемого транспортного средства 10, показанного на фиг. 1.
Кабель-тросовое соединение 40 между беспилотным подводным транспортным средством и блоком 24, как показано на фиг. 6, может быть использовано для зарядки блока 66 питания в блоке 24, без необходимости требования также передачи данных через кабель-трос 40. В данном случае передача данных между беспилотным подводным транспортным средством и блоком 24 может осуществляться беспроводным образом, и кабель-трос 40 может быть отсоединен, как только блок 66 питания блока 24 заряжен, освобождая беспилотное подводное транспортное средство для других заданий вне рабочего радиуса, обеспеченного кабелем-тросом 40.
Прикрепляющий/высвобождающий механизм 50 и приводная система 60 блока 24 являются необязательным условием. Например, прикрепляющий/высвобождающий механизм 50 может быть выполнен на подводной конструкции для взаимодействия с пассивным крепежным образованием на блоке 24, таким как штифт, углубление или крюк. Кроме того, для блока 24 не является необходимым иметь возможность перемещения самого себя вокруг подводной конструкции. Например, для блока 24 не является необходимым иметь возможность перемещения в целом после прикрепления к подводной конструкции, как видно по фиг. 4-7 чертежей. В качестве альтернативы подводная конструкция вместо этого может служить опорой для каретки, которая перемещает блок 24 вокруг конструкции после прикрепления блока 24 к каретке.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЕНИЕ БЕСПИЛОТНЫМ ПОДВОДНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ ПОД ВОДОЙ | 2015 |
|
RU2682072C2 |
| СПОСОБЫ СПУСКА И ПОДЪЕМА ДЛЯ ПОГРУЖНЫХ ТРАНСПОРТНЫХ СРЕДСТВ И ДРУГИХ ПОЛЕЗНЫХ ГРУЗОВ | 2012 |
|
RU2623293C2 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
| СПОСОБ ПРОВОДКИ, ШВАРТОВКИ И ОТШВАРТОВКИ МОРСКОГО ГРУЗОВОГО СУДНА В АВТОНОМНОМ РЕЖИМЕ И СПОСОБ РАБОТЫ ЦИФРОВОЙ ИНСТРУМЕНТАЛЬНОЙ ПЛАТФОРМЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ГРУППЫ АВТОНОМНЫХ СУДОВ-БУКСИРОВ В ПОРТОВОЙ АКВАТОРИИ | 2023 |
|
RU2809129C1 |
| АВТОНОМНАЯ ПОДВОДНАЯ СИСТЕМА ДЛЯ ЧЕТЫРЕХМЕРНОГО МОНИТОРИНГА ОКРУЖАЮЩЕЙ СРЕДЫ | 2012 |
|
RU2590800C2 |
| Система многопараметрического мониторинга района техногенной аварии | 2024 |
|
RU2840313C1 |
| ПОГРУЖАЕМАЯ ПЛАТФОРМА-ТРАНСФОРМЕР И РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОСУЩЕСТВЛЕНИЯ ПОДВОДНЫХ РАБОТ | 2010 |
|
RU2438914C1 |
| РОБОТОТЕХНИЧЕСКИЙ РАЗВЕДЫВАТЕЛЬНЫЙ КОМПЛЕКС АМФИБИЙНЫЙ | 2017 |
|
RU2654898C1 |
| Способ многофункциональной аэросъемки на основе беспилотных воздушных судов для планирования и сопровождения сейсморазведочных работ и многофункциональный аппаратно-программный комплекс для его реализации | 2021 |
|
RU2779707C1 |
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
Изобретение относится к области судостроения и касается выполнения подводных работ. Задание по проверке, контролю, обслуживанию и строительству выполняют на подводной конструкции посредством использования подводного транспортного средства для переноса погружного блока (24) к подводной конструкции. Блок содержит инструмент или датчик, выполненные с возможностью выполнения требуемого задания на подводной конструкции, и бортовой блок питания и управляющее устройство, выполненные с возможностью питания и управления инструментом или датчиком. Блок перемещают от подводного транспортного средства (10) так, чтобы он закреплялся на подводной конструкции. Подводное транспортное средство затем может находиться на расстоянии от указанного блока. Пока блок размещен на подводной конструкции, инструмент или датчик указанного блока выполняет требуемое задание на подводной конструкции при питании и управлении бортовым источником питания и управляющим устройством указанного блока. Изобретение позволяет оптимизировать процесс проведения подводных работ по проверке, контролю, обслуживанию и строительству на подводной конструкции. 3 н. и 29 з.п. ф-лы, 11 ил.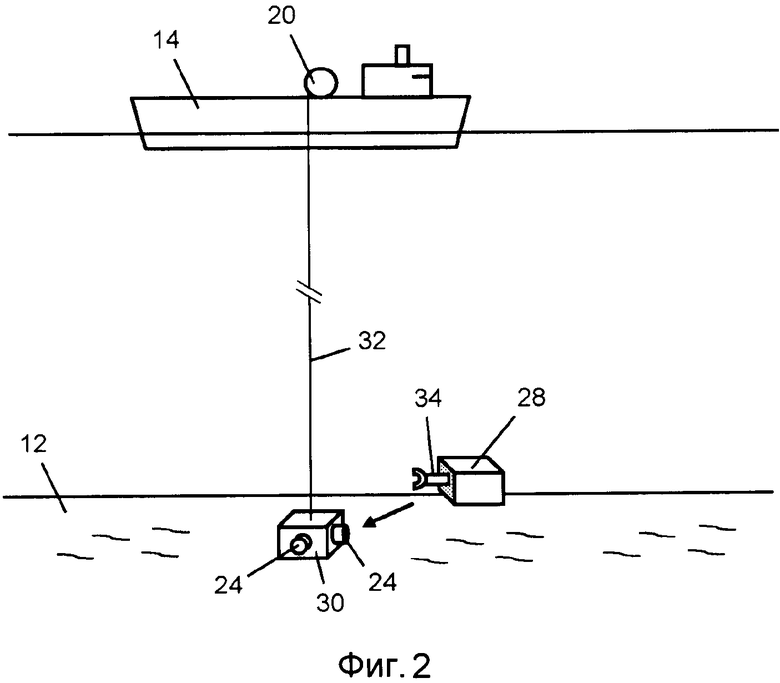
1. Способ проверки, контроля или обслуживания подводной конструкции или выполнения на ней строительного задания, включающий:
перемещение подводного транспортного средства для переноса погружного блока, содержащего инструмент или датчик, к подводной конструкции;
перемещение указанного блока от подводного транспортного средства для размещения на подводной конструкции и
проверку, контроль или обслуживание подводной конструкции или выполнение на ней строительного задания с использованием инструмента или датчика указанного блока, питаемого от бортового источника питания указанного блока, когда блок размещен на подводной конструкции, а подводное транспортное средство находится на расстоянии от указанного блока, с тем чтобы оставаться доступным под водой для выполнения другого задания под водой, наблюдения за ним или управления им.
2. Способ по п. 1, в котором подводное транспортное средство находится на расстоянии от указанного блока, с тем чтобы оставаться доступным под водой для связи с указанным блоком.
3. Способ по п. 1 или 2, в котором подводное транспортное средство находится на расстоянии от указанного блока, с тем чтобы оставаться доступным под водой для обеспечения питания указанного блока.
4. Способ по любому из пп. 1, 2, включающий питание, зарядку или заправку бортового блока питания от внешнего источника энергии, пока указанный блок размещен на подводной конструкции.
5. Способ по п. 4, включающий питание инструмента или датчика от бортового блока питания, пока указанный блок не соединен с внешним источником энергии.
6. Способ по любому из пп. 1, 2, 5, включающий выполнение программы на борту указанного блока или управление им другим образом для выполнения задания автономным или полуавтономным по отношению к подводному транспортному средству образом.
7. Способ по п. 6, в котором указанный блок является по меньшей мере частично самоуправляемым для выполнения задания.
8. Способ по любому из пп. 1, 2, 5, 7, также включающий передачу данных между указанным блоком и подводным транспортным средством, пока подводное транспортное средство находится на расстоянии от указанного блока.
9. Способ по п. 8, в котором подводное транспортное средство передает данные от указанного блока в место приема.
10. Способ по п. 8, в котором данные содержат управляющие сигналы, посылаемые от подводного транспортного средства к указанному блоку.
11. Способ по любому из пп. 1, 2, 5, 7, 9, 10, в котором подводное транспортное средство выполняет другое задание, пока оно находится на расстоянии от указанного блока.
12. Способ по любому из пп. 1, 2, 5, 7, 9, 10, также включающий перемещение указанного блока относительно подводной конструкции, будучи размещенным на подводной конструкции, после его перемещения от подводного транспортного средства.
13. Способ по п. 12, в котором перемещение указанного блока относительно подводной конструкции является самоходным.
14. Способ по любому из пп. 1, 2, 5, 7, 9, 10, 13, также включающий перемещение указанного блока от подводной конструкции к подводному транспортному средству после завершения или прерывания задания.
15. Способ по п. 14, также включающий перемещение подводного транспортного средства для переноса указанного блока в место, в котором его хранят, или заряжают, или заправляют, или выгружают из него данные.
16. Способ по п. 15, также включающий перенос заряженного или заправленного указанного блока к подводной конструкции для выполнения другого задания на данной конструкции.
17. Способ по любому из пп. 1, 2, 5, 7, 9, 10, 13, 15, 16, включающий прикрепление указанного блока после его перемещения от подводного транспортного средства к монтажной конструкции, прикрепленной заранее к подводной конструкции.
18. Способ по п. 17, также включающий перемещение указанного блока вдоль монтажной конструкции относительно подводной конструкции после его прикрепления к монтажной конструкции.
19. Погружной блок, выполненный с возможностью прикрепления к подводной конструкции и зависимый от подводного транспортного средства в отношении перемещения в воде к подводной конструкции и содержащий:
инструмент или датчик, выполненный с возможностью проверки, контроля или обслуживания подводной конструкции или выполнения на ней строительного задания;
бортовой блок питания, выполненный с возможностью питания инструмента или датчика для проверки, контроля или обслуживания подводной конструкции или выполнения на ней строительного задания, причем бортовой блок питания является зависимым от подводного транспортного средства в отношении питания, зарядки или заправки; и
бортовое управляющее устройство, выполненное с возможностью управления инструментом или датчиком для выполнения задания.
20. Блок по п. 19, также содержащий прикрепляющее оборудование для прикрепления указанного блока к подводной конструкции и/или к подводному транспортному средству.
21. Блок по п. 20, также содержащий бортовую прикрепляющую и высвобождающую систему, выполненную с возможностью приведения в действие прикрепляющего оборудования указанного блока.
22. Блок по любому из пп. 19-21, в котором управляющее устройство запрограммировано для управления инструментом или датчиком для выполнения задания автономным или полуавтономным относительно основного подводного транспортного средства образом.
23. Блок по любому из пп. 19-21, также содержащий бортовую приводную систему, выполненную с возможностью работы на подводной конструкции, к которой блок прикреплен, для перемещения указанного блока относительно данной конструкции при выполнении задания или заданий в различных местах на конструкции.
24. Блок по любому из пп. 19-21, также содержащий бортовой модуль ввода/вывода, выполненный с возможностью передачи данных на внешний приемник и/или приема командных сигналов от внешнего управляющего устройства.
25. Система для проверки, контроля, обслуживания подводной конструкции или выполнения на ней строительного задания, содержащая:
погружной блок по любому из пп. 19-24;
подводное транспортное средство, выполненное с возможностью перемещения для переноса указанного блока к подводной конструкции; и
перемещающее устройство для перемещения указанного блока от подводного транспортного средства для размещения на подводной конструкции, вследствие чего подводное транспортное средство имеет возможность перемещения, оставаясь под водой так, чтобы находиться на расстоянии от указанного блока, пока он размещен на подводной конструкции, с тем чтобы инструментом или датчиком указанного блока проверять, контролировать или обслуживать подводную конструкцию или выполнять на ней строительное задание;
причем подводное транспортное средство размещено и выполнено с возможностью соединения с указанным блоком для питания, зарядки или заправки бортового блока питания указанного блока.
26. Система по п. 25, в которой указанный блок выполнен с возможностью переноса к подводной конструкции посредством манипулятора подводного транспортного средства.
27. Система по п. 25 или 26, в которой перемещающее устройство содержит манипулятор подводного транспортного средства.
28. Система по п. 25 или 26, также содержащая размещающее устройство для опускания указанного блока отдельно от подводного транспортного средства, причем из указанного устройства подводное транспортное средство имеет возможность забрать указанный блок под водой и перенести его к подводной конструкции.
29. Система по п. 25 или 26, в которой инструмент или датчик указанного блока выполнен с возможностью работы, когда указанный блок отсоединен от подводного транспортного средства.
30. Система по п. 25 или 26, в которой подводное транспортное средство выполнено с возможностью приема данных от указанного блока.
31. Система по п. 30, в которой подводное транспортное средство выполнено с возможностью передачи данных от указанного блока в место приема.
32. Система по любому из пп. 25, 26, 31, в которой подводное транспортное средство выполнено с возможностью отправки управляющих сигналов к указанному блоку.
| WO 2013046577 A1, 04.04.2013 | |||
| WO 2012156425 A2, 22.11.2012 | |||
| УНИВЕРСАЛЬНАЯ САМОХОДНАЯ СПУСКАЕМАЯ СИСТЕМА ОБСЛЕДОВАНИЯ И РЕМОНТА ОБЪЕКТОВ ГИДРОТЕХНИЧЕСКОЙ ИНФРАСТРУКТУРЫ | 2011 |
|
RU2468960C1 |
| WO 0198140 A1, 27.12.2001 | |||
| JP H08145733 A, 07.06.1996. | |||

