(54) РАБОЧИЙ ОРГАН РЫХЛИТЕЛЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Рыхлитель подъемно-ударного действия | 1980 |
|
SU910954A1 |
| Рабочий орган рыхлителя | 1979 |
|
SU785434A1 |
| РЫХЛИТЕЛЬ УДАРНО-СКАЛЫВАЮЩЕГО ДЕЙСТВИЯ | 1990 |
|
RU2017901C1 |
| Рыхлитель | 1979 |
|
SU840260A1 |
| ГАЗОИМПУЛЬСНЫЙ РЫХЛИТЕЛЬ | 1999 |
|
RU2154734C1 |
| Рыхлитель | 1980 |
|
SU899796A1 |
| Рыхлитель | 1981 |
|
SU960395A1 |
| Рабочий орган рыхлителя | 1980 |
|
SU927917A1 |
| Рыхлитель | 1990 |
|
SU1765316A1 |
| Клиновой рабочий орган для ударного разрушения прочных и мерзлых грунтов | 1982 |
|
SU1016444A1 |


I
Изобретение относится к рыхлителям для разработки мерзлых и прочных грунтов с клиновидными рабочими органами ударного действия.
Известен рабочий орган для разработки грунта, в котором для повышения эффективности разработки мерзлого грунта обраш,енная к забою стенка корпуса выполнена с поворотной секцией, взаимодействующей с толкателем, установленным с возможностью перемещения по другой стенке корпуса. При этом поворотная секция имеет в сечении форму треугольника, обращенного внутрь корпуса. Поворот секции осуществляется после погружения клина на заданную глубину 1.
Недостатком рабочего органа являются больщие силы трения грунта о боковые стенки и отсутствие при извлечении клина разрушения грунта, что не обеспечивает производительное использование холостого хода.
Известен также рабочий орган с клиновидным корпусом, который перемещается внутри направ-ляющей. Рабочие поверхности клиновидного корпуса выполнены ступенчатыми с образованием уступов.
При разрушении грунтов таким рабочим органом глубина внедрения его будет большая, чем у традиционных конструкций. Контакт с грунтом рабочих поверхностей клиновидного корпуса будет меньшим из-за 5 наличия уступов. Кроме того, при извлечении такого органа будет происходить дополнительное разрушение грунта 2.
Недостатком указанного рабочего органа является возможность забивания уступов разрушенным грунтом, что ведет к снижению глубины погружения его в грунт: и недостаточная эффективность дополнительного разрушения грунта при извлечении из него рабочего органа.
Целью изобретения является предотвращение залипания уступов клиновидного корпуса, что позволяет повысить производительность рыхлителя.
Цель достигается тем, что рабочий орган снабжен расположенными вдоль верхних ступеней рабочих поверхностей и щарнирно соединенными с корпусом подпружиненными пластинами, причем уступы выполнены с наружными относительно пластин упорами. Для регулирования жесткости упругого
поворота пластин рабочий оргап снабжен расположенным внутри корпуса и установленным симметрично пластинам с возможностью продольного перемещения конусообразным толкателем со штоком. При этом пластины подпружинены относительно толкателя, а шток связан с кор пусом посредством винтового соединения.
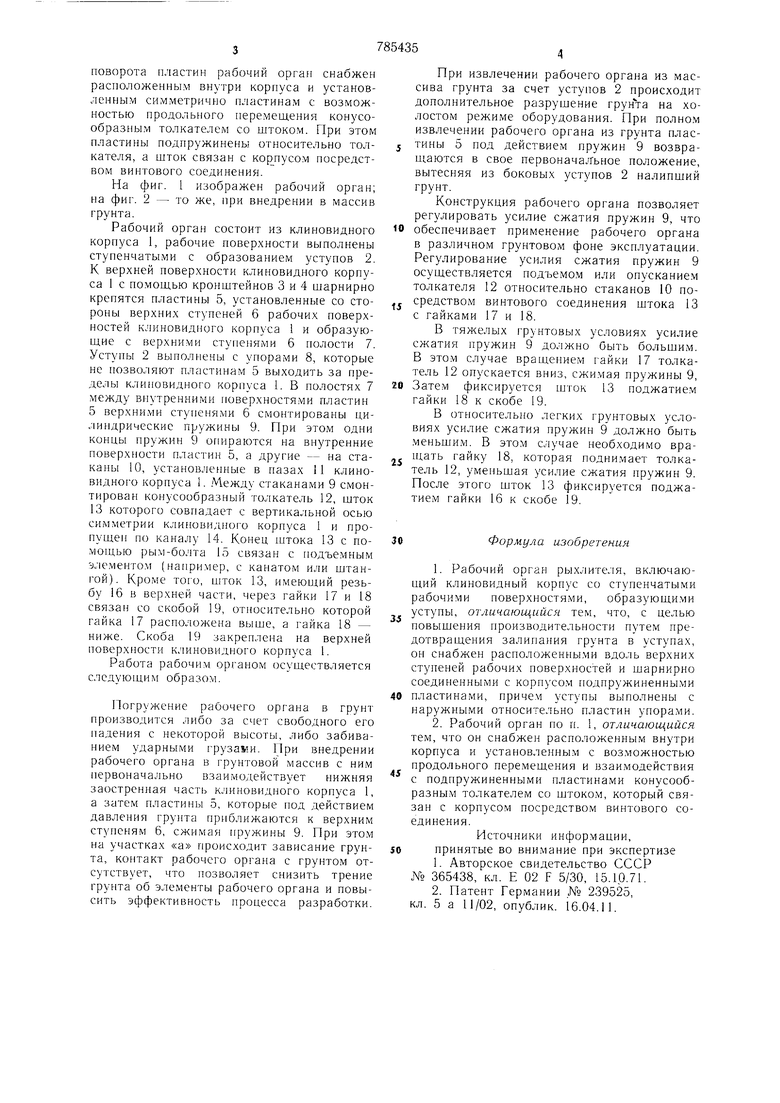
На фиг. 1 изображен рабочий орган; на фиг. 2 - то же, при внедрении в массив грунта.
Рабочий орган состоит из клиновидного корпуса 1, рабочие поверхности выполнены ступенчатыми с образованием уступов 2. К верхней поверхности клиповидпого корпуса 1 с помош,ью кронштейнов 3 и 4 шарнирно крепятся пластины 5, установленные со стороны верхних ступеней 6 рабочих поверхностей клиновидного корпуса 1 и образующие с верхними ступенями б полости 7. Уступы 2 выполнены с упорами 8, которые не позволяют пластинам 5 выходить за пределы клиновидного корпуса 1. В полостях 7 между впутренними поверхностями пластин 5 верхни.ми сту 1енями 6 смонтированы цилиндрические пружины 9. При этом одни концы пружин 9 опираются на внутренние поверхности пластин 5, а другие - на стаканы 10, установленные в пазах 11 клиновидного корпуса I. Между стаканами 9 смонтирован конусообразный толкатель 12, щток 13 которого совпадает с вертикальной осью симметрии клиновидного корпуса 1 и пропущеп по каналу 14. Конец штока 13 с помонгью рым-болта 15 связан с подъемным элементом (например, с канатом или штангой). Кроме того, шток 13, имеюпдий резьбу 16 в верхней части, через гайки 17 и 18 связан со скобой 19, относительно которой гайка 17 расположена выше, а гайка 18 - ниже. Скоба 19 закреплена на верхней поверхпости клиновидного корпуса 1.
Работа рабочим органом осуществляется следующим образом.
Погружение рабочего органа в грунт производится либо за счет свободного его падения с некоторой высоты, либо забиванием ударными грузами. При внедрении рабочего органа в грунтовой массив с ним первоначально взаимодействует нижняя заостренная часть клиновидного корпуса 1, а затем пластины 5, которые под действием давления грунта приближаются к верхним ступеням 6, сжимая пружины 9. Прн этом на участках «а происходит зависание грунта, контакт рабочего органа с грунтом отсутствует, что позволяет снизить трение грунта об эле.менты рабочего органа и повысить эффективность процесса разработки.
При извлечении рабочего органа из массива грунта за счет уступов 2 происходит дополнительное разрушение грунта на холостом режиме оборудования. При полном извлечении рабочего органа из грунта пластины 5 под действием пружин 9 возвращаются в свое первоначальное положение, вытесняя из боковых уступов 2 налипший грунт.
Конструкция рабочего органа позволяет
регулировать усилие сжатия пружин 9, что
обеспечивает применение рабочего органа
в различном грунтовом фоне эксплуатации.
Регулирование усилия сжатия пружин 9
осуществляется подъемо.м или опусканием
толкателя 12 относительно стаканов 10 посредством винтового соединения штока 13
с гайками 17 и 18.
В тяжелых грунтовых уеловиях усилие сжатия пружин 9 должно быть больщим. В этом случае вращением гайки 17 толкатель 12 опускается вниз, сжимая пружины 9, Затем фиксируется шток 13 поджатием гайки 18 к скобе 19.
В относителы1Ч) легких грунтовых условиях усилие сжатия пружин 9 должно быть .меньши.м. В этом случае необходимо враи;ать гайку 18, которая подни.мает толкатель 12, уменьшая усилие сжатия пружин 9. После этого шток 13 фиксируется поджатием гайки 16 к скобе 19.
Формула изобретения
повышения производительности путем предотвращения залипания грунта в уступах, он снабжен расположенны.ми вдоль верхних ступеней рабочих поверхностей и шарнирно соединенными с корпусо.м подпружиненными плаетинами, причем уступы выполнены с наружными относительно пластин упора.ми.
с подпружиненными пластинами конусообразны.м толкателем со штоко.м, который связан с корпусом посредством винтового соединения.
Источники информации,
принятые во вни.мание при экспертизе
9 и 2,1
fc 2
4
