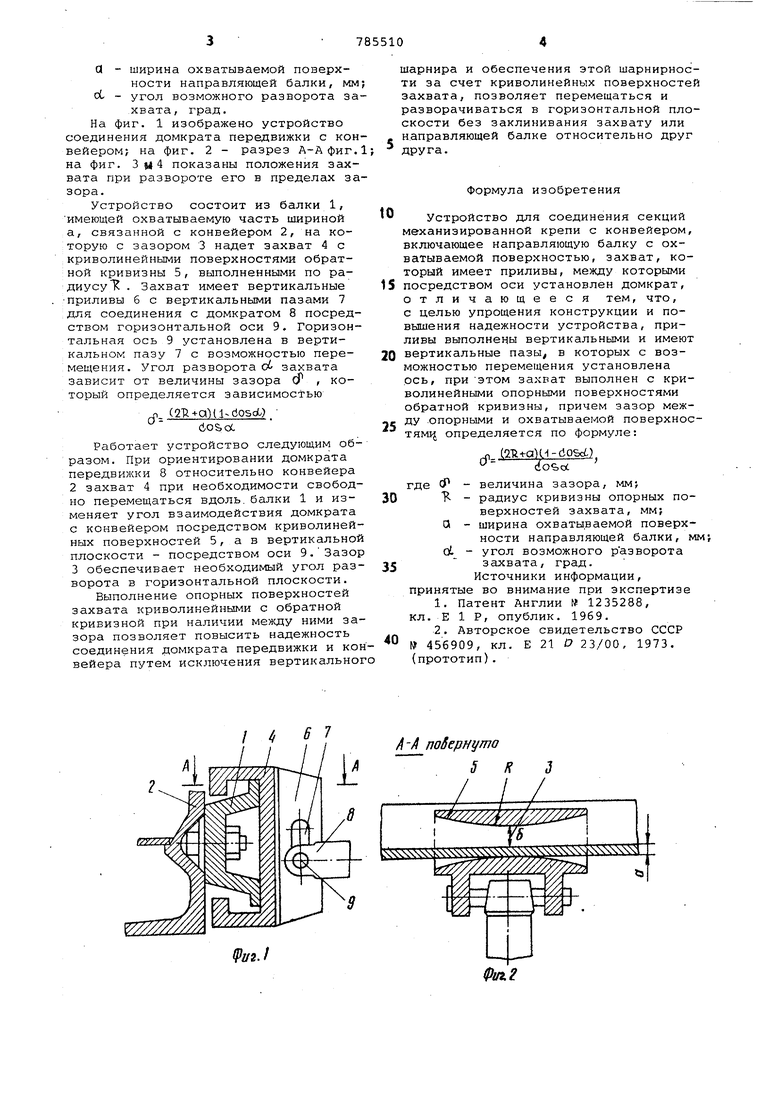
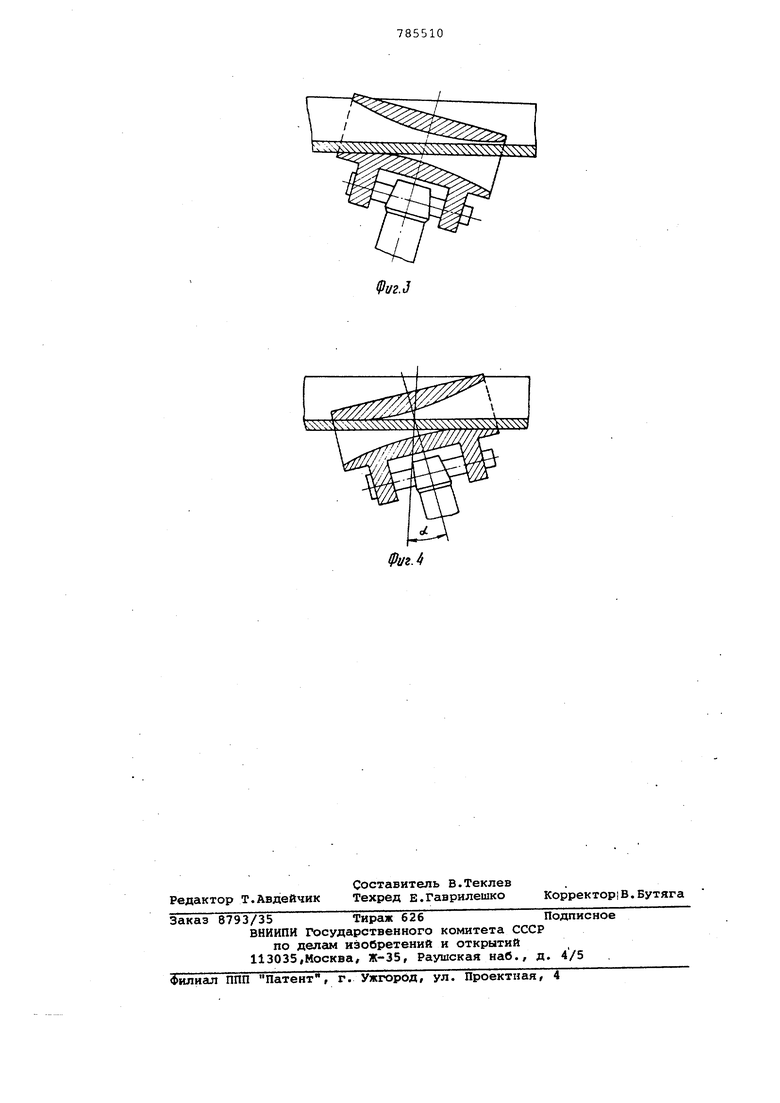
Изобретение относится к технике добычи угля из лав и может быть использовано в выемочных струговых установках с механизированными чрепями Известно устройство для соединения секций механизированной крепи с конвейером, включающее гидродомкрат, направляющий рельс, соединенный с забойным конвейером, ползуны С-образного сечения, охватывающие головку рель са и соединенные межу собой гидроцилиндром (1, Данное устройство позволяет С-образным ползунам, соединенным с гидро цилиндром, перемещаться по направляющему рельсу, но не позволяет изменять угол взаимодействия гидродомкра та с конв.ейером в горизонтальной пло кости, кроме того, ползуны-заклиниваются на головке рельса при их разворОте с помощью гидроцилиндра, что ограничивает их дальнейшее перемещение. Наиболее близким решением по технической сущности и достигаемому результату является устройство для соединения секций механизированной кре пи с конвейером, включающее направля ющую балку с охватываемой поверхностью, захват, который имеет Приливы, между которыми посредством оси установлен домкрат 2Д. Такая конструкция позволяет менять угол взаимодействия гидродомкрата передвижки с конвейером, но не позволяет захвату перемещаться вдоль балки, кроме того, для приспосабливаемости используется шарнирная головка как дополнительный элемент, снижающий надежность конструкции. Целью изобретения является упрощение конструкции и повышение надежнс сти устройства. Поставленная цель достигается тем, что приливы выполнены вертикальными и имеют вертикальные пазы, в которых с возможностью перемещения установлена ось, при этом захват выполнен с криволинейными опорными поверхностями обратной кривизны, причем зазор между опорными и охватываемой поверхностями определяется по формуле: - fgT gKi-uo&cfb) uosS: где сЯ - величина зозора, мм К - радиус кривизны опорных поверхкостей захвата, мм; О - ширина охватываемой поверхности направляющей балки, м - угол возможного разворота з хвата, град. На фиг. 1 изображено устройство соединения домкрата передвижки с ко вейером; на фиг. 2 - разрез А-Афиг на фиг. 3«4 показаны положения зах вата при развороте его в пределах з зора. Устройство состоит из балки 1, имеющей охватываемую часть шириной а, связанной с конвейером 2, на которую с зазором 3 надет захват 4 с криволинейными поверхностями обратной кривизны 5, выполненными по радиусу . Захват имеет вертикальные приливы 6 с вертикальными пазами 7 для соединения с домкратом 8 посредством горизонтальной оси 9. Горизонтальная ось 9 установлена в вертикальном пазу 7 с возможностью перемещения. Угол разворота с захвата зависит от величины зазора сГ , который определяется зависимостью J. (2Ti+a)tl d05oL) боьо;. Работает устройство следующим образом. При ориентировании домкрата передвилски 8 относительно конвейера 2захват 4 при необходимости свободно перемещаться вдоль, балки 1 и изменяет угол взаимодействия домкрата с конвейером посредством криволинейных поверхностей 5, а в вертикальной плоскости - посредством оси 9.Зазор 3обеспечивает необходимый угол разворота в горизонтальной плоскости. Выполнение опорных поверхностей захвата криволинейными с обратной кривизной при наличии между ними зазора позволяет повысить надежность соединения домкрата передвижки и кон вейера путем исключения вертикальног шарнира и обеспечения этой шарнирности за счет криволинейных поверхностей захвата, позволяет перемещаться и разворачиваться в горизонтальной плоскости без заклинивания захвату или направляющей балке относительно друг друга. Формула изобретения Устройство для соединения секций механизированной крепи с конвейером, включающее направляющую балку с охватываемой поверхностью, захват, который имеет приливы, между которыми посредством оси установлен домкрат, отличающееся тем, что, с целью упрощения конструкции и повышения надежности устройства, приливы выполнены вертикальными и имеют вертикальные пазы, в которых с возможностью перемещения установлена ось, приЭТОМ захват выполнен с криволинейными опорными поверхностями обратной кривизны, причем зазор между -опорными и охватываемой поверхностям определяется по формуле: гО I T t-ciH-l-doSc) 7Б где СР -R -величина зазора, мм; -радиус кривизны опорных поверхностей захвата, мм; О - ширина охватываемой поверхности направляющей балки, мм; - угол возможного разворота захвата/ град. Источники информации, принятые во внимание при экспертизе 1.Патент Англии № 1235288, кл. Е 1 Р, опублик. 1969. 2.Авторское свидетельство СССР № 456909, кл. Е 21 О 23/00, 1973. (прототип).
1
uzJ
А-А подерну то
5 К 3
/ / /
:z z /////z 2:i
I
