(54) ПРИВОД ГРУЗОПОДЪЕМНОГО МЕХАНИЗМА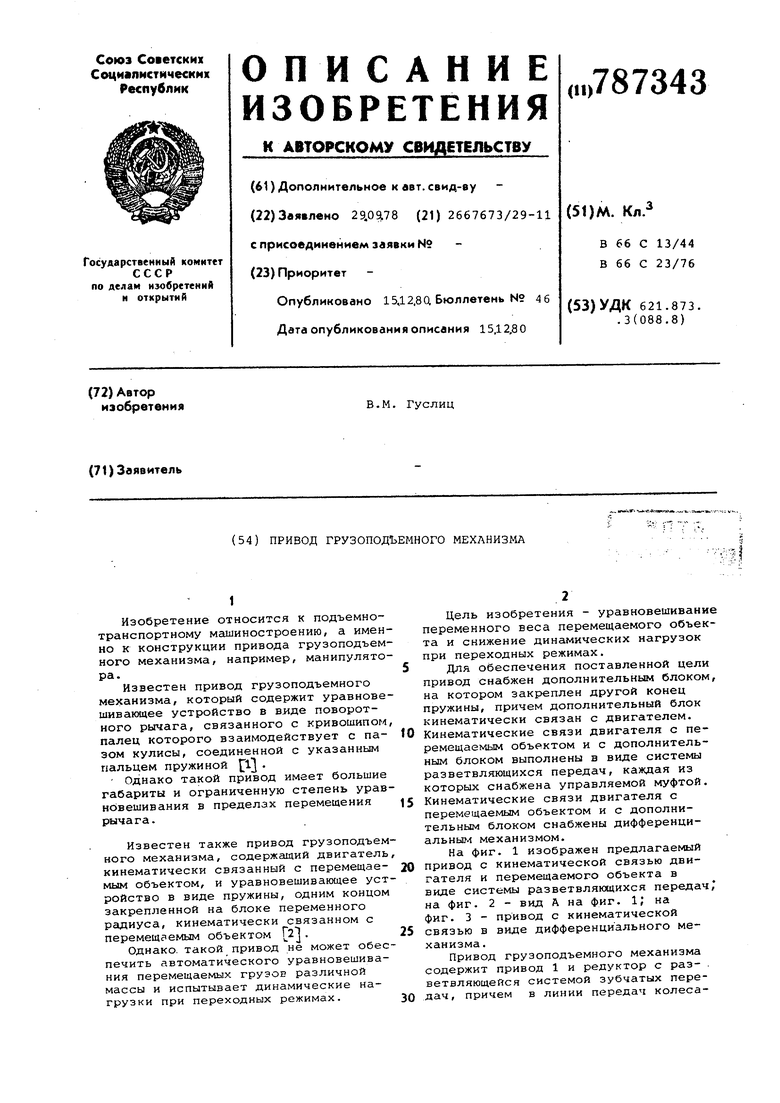
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1982 |
|
SU1085804A1 |
| РЕГУЛИРУЕМЫЙ ВЕНТИЛЯТОР АППАРАТА ВОЗДУШНОГО ОХЛАЖДЕНИЯ | 2000 |
|
RU2183290C2 |
| ПРИВОД НЕЗАВИСИМОГО ВАЛА ОТБОРА МОЩНОСТИ ТЯГОВО-ТРАНСПОРТНЫХ СИСТЕМ | 1999 |
|
RU2162798C2 |
| Механизм поворота гусеничной машины | 1971 |
|
SU653162A1 |
| Система для автоматического регулирования подачи бурового инструмента | 1977 |
|
SU726295A1 |
| МЕХАНИЗМ ПОВОРОТА | 1996 |
|
RU2093453C1 |
| УСТРОЙСТВО ДЛЯ РАЗВАЛЬЦОВКИ ТРУБ В ТРУБНЫХ ДОСКАХ | 1996 |
|
RU2103094C1 |
| РЕКУПЕРАТИВНАЯ РЕВЕРСИВНАЯ БЕССТУПЕНЧАТАЯ ГИДРОТРАНСМИССИЯ КОЛЕСНОЙ МАШИНЫ | 2003 |
|
RU2259928C2 |
| Гидромеханическая многоконтурная передача прямого хода транспортного средства с газотурбинным двигателем | 1980 |
|
SU944954A1 |
| ПРИВОД ПОВОРОТА | 2007 |
|
RU2328442C1 |
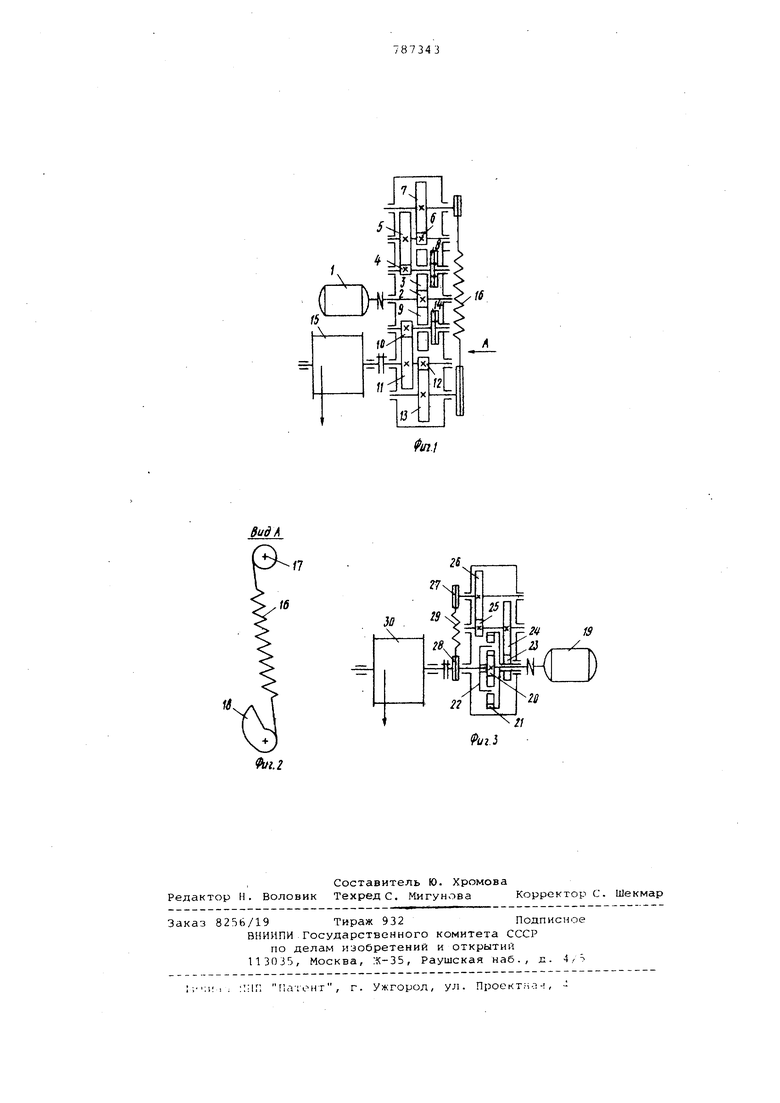
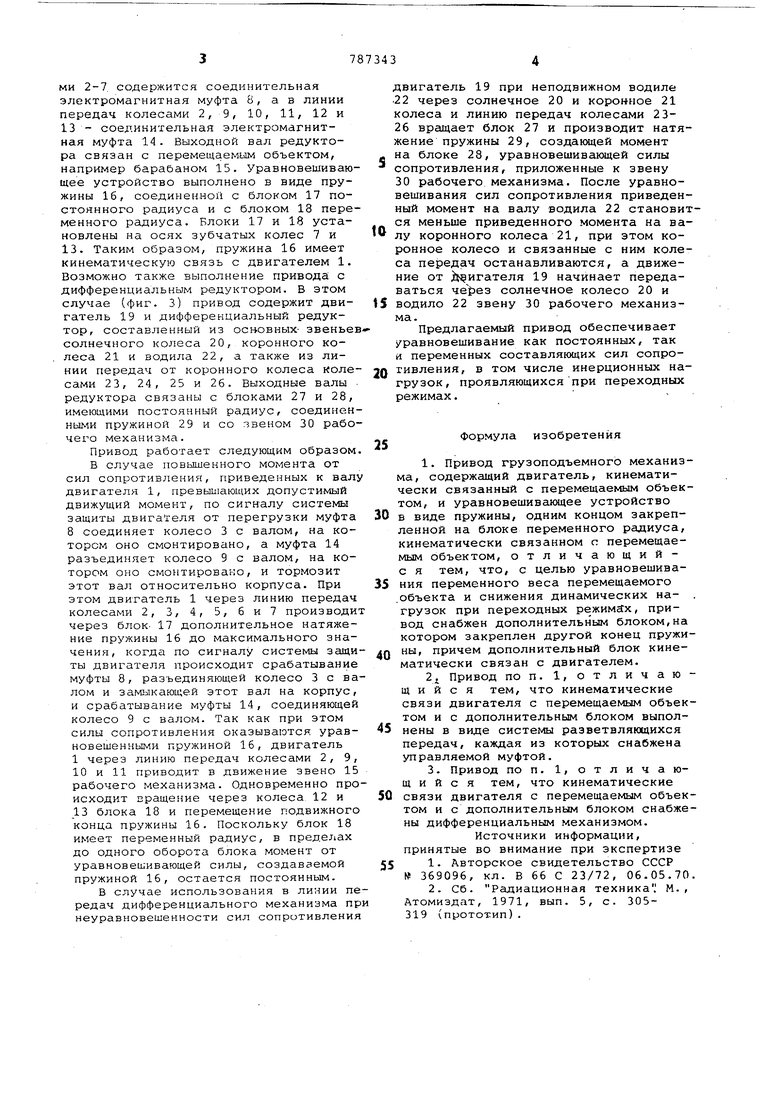
Изобретение относится к подъемнотранспортному машиностроению, а именно к конструкции привода грузоподъемного механизма, например, манипулятора. Известен привод грузоподъемного механизма, который содержит уравновешивающее устройство в виде поворотного рычага, связанного с кривошипом палец которого взаимодействует с пазом кулисы, соединенной с указанным пальцем пружиной 1 Однако такой привод имеет большие габариты и ограниченную степень урав новешивания в пределах перемещения рычага. Известен также привод грузоподъем ного механизма, содержащий двигатель кинематически связанный с перемещаемым объектом, и уравновешивающее уст ройство в виде пружины, одним концом закрепленной на блоке переменного ргудиуса, кинематически связанном с перемещаемым объектом Г2. Однако, такой привод не может обес печить автоматического уравновешивания перемещаемых грузов различной массы и испытывает динамические нагрузки при переходных режимах. Цель изобретения - уравновешивание переменного веса перемещаемого объекта и снижение динамических нагрузок при переходных режимах. для обеспечения поставленной цели привод снабжен дополнительным блоком, на котором закреплен другой конец пружины, причем дополнительный блок кинематически связан с двигателем. Кинематические связи двигателя с перемещаемым объектом и с дополнительным блоком выполнены в виде системы разветвляющихся передач, каждая из которых снабжена управляемой муфтой. Кинематические связи двигателя с перемещаемым объектом и с дополнительным блоком снабжены дифференциальным механизмом. На фиг. 1 изображен предлагаемый привод с кинематической связью двигателя и перемещаемого объекта в виде системы разветвляющихся передач, на фиг. 2 - вид А на фиг. 1; на фиг. 3 - привод с кинематической связью в виде дифференциального механизма. Привод грузоподъемного механизма содержит привод 1 и редуктор с разветвляющейся системой зубчатых передач, причем в линии передач колесами 2-7. содержится соединительная электромагнитная муфта 8, а в линии передач колесами 2,9, 10, 11, 12 и 13 - соединительная электромагнитная муфта 14. Выходной вал редуктора связан с перемещаемым объектом, например барабаном 15. Уравновешивающее устройство выполнено в виде пружины 16, соединенно с блоком 17 постоянного радиуса и с блоком 18 переменного радиуса. Блоки 17 и 18 установлены на осях зубчатых колес 7 и 13. Таким образом, пружина 16 имеет кинематическую связь с двигателем 1. Возможно также выполнение привода с дифференциальным редуктором. В этом случае (фиг. 3) привод содержит двигатель 19 и дифференциальный редуктор, составленный из основных- звеньевсолнечного колеса 20, коронного колеса 21 и водила 22, а также из линии передач от коронного колеса колесами 23, 24, 25 и 26. Выходные валы редуктора связаны с блоками 27 и 28, имеющими постоянный радиус, соединенными пружиной 29 и со звеном 30 рабочего механизма.
Привод работает следующим образом В случае повышенного момента от сил сопротивления, приведенных к валу двигателя 1, превышающих допустимый движущий момент, по сигналу системы защиты двигателя от перегрузки муфта 8 соединяет колесо 3 с валом, на котором оно смонтировано, а муфта 14 разъединяет колесо 9 с валом, на котором оно смонтировано, и тормозит этот вал относительно корпуса. При этом двигатель 1 через линию передач колесами 2, 3, 4, 5, 6 и 7 производи через блок- 17 дополнительное натяжение пружины 16 до максимального значения, когда по сигналу системы защиты двигателя происходит срабатывание муфты 8, разъединяющей колесо 3 с валом и замыкающей этот вал на корпус, и срабатывание муфты 14, соединяющей колесо 9 с валом. Так как при этом силы сопротивления оказываются уравновешенными пружиной 16, двигатель 1 через линию передач колесами 2, 9, 10 и 11 приводит в движение звено 15 рабочего механизма. Одновременно происходит вращение через колеса 12 и 13 блока 18 и перемещение подвижного конца пружины 16. Поскольку блок 18 имеет переменный радиус, в пределах до одного оборота блока момент от уравновешивающей силы, создаваемой пружиной 16, остается постоянным.
В случае использования в линии передач дифференциального механизма пр неуравновешенности сил сопротивления
двигатель 19 при неподвижном водиле -22 через солнечное 20 и коронное 21 колеса и линию передач колесами 2326 вращает блок 27 и производит натяжение пружины 29, создающей момент на блоке 28, уравновешивающей силы сопротивления, приложенные к звену 30 рабочего механизма. После уравновешивания сил сопротивления приведенный момент на валу водила 22 становится меньше приведенного момента на валу коронного колеса 21, при этом коронное колесо и связанные с ним колеса передач останавливаются, а движение от игателя 19 начинает передаваться солнечное колесо 20 и
S водило 22 эвену 30 рабочего механизма.
Предлагаемый привод обеспечивает уравновешивание как постоянных, так и переменных составляющих сил сопроQ тивления, в том числе инерционных нагрузок, проявляющихся при переходных режимах.
Формула изобретения
2i Привод по п. 1, отличающийся тем, что кинематические связи двигателя с перемещаемым объектом и с дополнительным блоком выполнены в виде системы разветвляющихся передач, каждая из которых снабжена управляемой муфтой.
Источники информации, принятые во внимание при экспертизе 5 1- Авторское свидетельство СССР № 369096, кл. В 66 С 23/72, 06.05.70.
26
//
(.3
