Изобретение относится к области машиностроения и может быть использовано для тягово-транспортных систем, например, тракторов для привода агрегатируемых с ними сельскохозяйственными машинами, требующих привода независимого вала отбора мощности.
Известен механический привод для передачи мощности двигателя, содержащий механизм соединения вала отбора мощности (ВОМ) с коленчатым валом двигателя и дополнительный редуктор для привода агрегатируемых машин, частота вращения хвостовика - 9 с-1 (540 об/мин) или 16,67 с-1 (1000 об/мин). Указанные частоты вращения хвостовика ВОМ соответствуют частоте вращения коленчатого вала двигателя, например, трактора при номинальной мощности [1].
Недостатком такого привода является высокий тормозной момент одного из элементов планетарного ряда, расположенного после понижающего редуктора. Так для тракторов МТЗ-100/102 передаточное число понижающего редуктора составляет iI = 2,64 для первой ступени, iII = 1,42 для второй ступени.
Передаточное число планетарного ряда i = 1,47 и K = 2,11.
Тормозной момент для остановки солнечной шестерни равен:
MTI = MК/K = MДi1/K  43 кгс,
43 кгс,
где K - характеристика планетарного ряда,
MTII = MД/K  23 кгс,
23 кгс,
Очевидно, что расчет конструкции тормоза необходимо выполнять из условия передачи крутящего момента, равного  43 кгс·м.
43 кгс·м.
При увеличении момента сопротивления или переводе работы двигателя на другой скоростной режим, например, с регуляторной характеристики на частичный, частота вращения коленчатого вала двигателя может уменьшиться на 30%, а пропорционально ей изменяется и частота независимого вала отбора мощности, что может привести к резкому ухудшению качества работ, выполняемых рабочим органом сельскохозяйственной машины, нарушению технологического процесса. Поэтому при неполной загрузке двигателя возможности выбора скорости режима трактора с использованием всережимного регулятора, позволяющего работать с меньшим расходом топлива до 30%, ограничены [2].
Известен также привод независимого вала отбора мощности транспортного средства, оборудованного гидрообъемной передачей с механизмом управления, содержащей приводимый от двигателя - энергетического средства гидронасос, гидравлически связанный с гидромотором, и механизм соединения вала отбора мощности с валом гидромотора [3].
В таком приводе режим работы независимого вала отбора мощности обеспечивается путем выведения из зацепления шестерни, связанной с осью ведущих колес, и соединения ее с гидромотором [3].
Необходимая частота вращения независимого вала отбора мощности достигается регулированием насоса. В зависимости от величины передаваемой мощности на привод рабочих органов сельскохозяйственной машины рычаг подачи топлива устанавливается в определенное положение, а механизмом управления гидрообъемной передачи регулируется частота вращения вала отбора мощности.
При изменении силы сопротивления агрегата, например, на внесении удобрений, трактористу необходимо одновременно выбирать экономичный режим работы двигателя и регулировать гидрообъемную передачу на заданную в допустимых пределах частоту вращения вала отбора мощности: 540±10 или 1000±25 об/мин.
Введение в конструкцию ВОМ гидрообъемной передачи с автоматическим регулированием передаточного числа и изменения подачи топлива в двигатель позволяет исключить недостаток, но такая система ВОМ имеет высокую стоимость и массу, а КПД не выше 85%.
Наиболее близким к заявленному является привод независимого вала отбора мощности тягово-транспортного средства, включающий приводимый от двигателя редуктор, выход которого является выходом ВОМ, гидронасос с гидропереключателем, шток которого кинематически связан с центробежным датчиком, причем последний сообщен с выходом двигателя [3]. Этот привод также обладает вышеперечисленными недостатками.
Технической задачей изобретения является поддержание заданной частоты вращения независимого вала отбора мощности при переменных нагрузках и работе двигателя машины на (частичных) скоростных режимах путем автоматического регулирования передаточного числа планетарного ряда при упрощении конструкции привода.
Поставленная задача решается тем, что в качестве редуктора использован двухступенчатый планетарный ряд с первой ступенью в виде трехзвенного дифференциального механизма, одно звено которого через зубчатую передачу связано с двигателем - другое со звеном второй ступени планетарного механизма, а с третьим звеном кинематически связан вал насоса, в напорную магистраль которого, содержащую обратный клапан, включен гидропереключатель в виде дроссельного регулятора с возможностью полного перекрытия напорной магистрали при оборотах вала, меньших установленного значения и полном ее открытии при оборотах, превышающих другое заданное значение.
Схема предлагаемого привода приведена на фиг. 1.
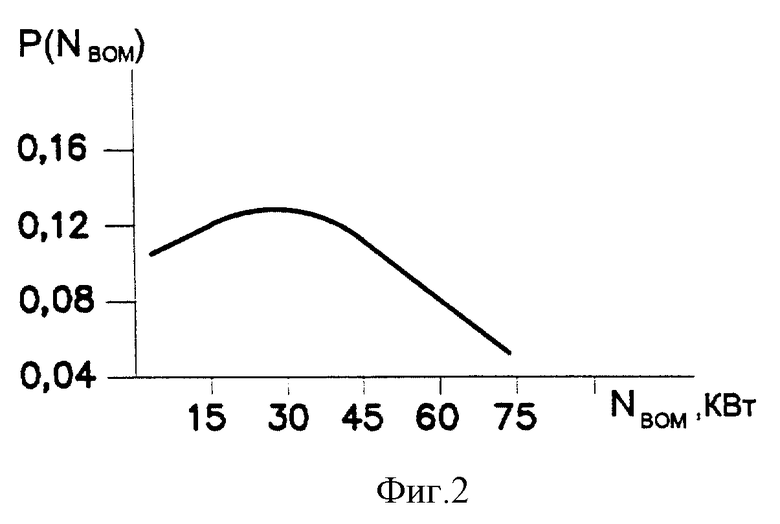
Привод включает коленчатый вал 1, шестерни 2 и 3, центробежный датчик 4 с грузами 5, шток 6, рычаг ручного управления 7, золотник 8 дроссельного регулятора 9, пружину 10, винт 11, коронную шестерню 12, сателлиты 13, водило 14, солнечную шестерню 15, шестерню 16, коронную шестерню 17, сателлиты 18, водило 19, солнечную шестерню 20, зубчатые муфты 21 и 22, 23 и 23', которые сообщены соответственно с хвостовиками 25 и 24, магистраль 26 в виде сливной гидролинии, датчик расхода 27, индикатор 28 в виде, например, лампочки, магистраль 29 в виде напорной гидролинии, обратный клапан 30, насос 31, на валу которого установлена шестерня 32.
Коленчатый вал 1 двигателя Д посредством шестерен 2 и 3 соединен с датчиком 4, например, центробежным и коронной шестерней 12 планетарного ряда I с регулируемым передаточным числом. Шток 6 центрального датчика 4 одним концом соединен с рычагом ручного управления 7, а другим - с золотником 8 дроссельного регулятора 9, удерживаемого в крайнем левом положении пружиной 10, величина усилия натяга которой регулируется винтом 11. Коронная шестерня 12 планетарного ряда I, через сателлиты 13 соединена с солнечной шестерней 15, которая посредством шестерен 16 и 32 соединена с валом насоса 31, выполняющего роль гидравлического тормоза Н переменной величины тормозного момента. Насос 31 гидролиниями 29 (напорная) и 26 (сливная) соединен с дроссельным регулятором 9.
Солнечная шестерня 20 планетарного ряда II жестко соединена с водилом 14 планетарного ряда I. Коронная шестерня 17, жестко соединенная с корпусом планетарного ряда II, посредством сателлитов 18 и водила 19 соединена с солнечной шестерней 20.
Солнечная шестерня 20 и водило 19 планетарного ряда II имеют зубчатые муфты 21 и 23, которые могут соединяться поочередно с валом 25 и валом 24.
Привод снабжен рычагом ручного управления 7, связанным с подвижным элементом центробежного датчика 4, и предназначен для плавного пуска и остановки вращения хвостовика 24 или 25 ВОМ.
Устройство работает следующим образом.
Поток мощности двигателя Д через коленчатый вал 1, шестерни 2 и 3, жестко закрепленные на коленчатом валу 1 и валу коронной шестерни 12, элементы планетарного ряда I 12, 13, 15, водило 14, жестко соединенное с солнечной шестерней 20 планетарного ряда II, передается через сателлиты 18 и водило 19 на хвостовике 24 (при зацеплении зубчатых муфт 23 и 23') или от солнечной шестерни 20 на хвостовик 25 (при зацеплении зубчатых муфт 21 и 22). Одновременное включение двух хвостовиков 24 и 25 недопустимо и исключается конструкцией привода ВОМ.
Хвостовики 24 и 25 сменные, их диаметры и шлицы регламентируются стандартами.
Заданная частота вращения независимого ВОМ зависит от величины усилия сжатия пружины 10, регулируемого винтом 11.
Поддержание заданной частоты вращения хвостовика ВОМ осуществляется устройством автоматического поддержания. Центробежная сила грузов 5 датчика 4 уравновешивается силой пружины 10 и золотник 8 при этом находится в крайнем левом положении - слив закрыт.
Передаточное число планетарного ряда I равно:
где
Величина значения i определяется исходя из частоты вращения коленчатого вала 1 двигателя, при которой величина мощности двигателя близка к величине математического ожидания мощности, необходимой для ее отбора на привод рабочих органов машин, агрегатируемых. например, с трактором.
На фиг. 2 приведена кривая распределения мощности, отбираемой через ВОМ для 84 машин, агрегатируемых с трактором класса 1,4 с двигателем мощностью 59 кВт. Математическое ожидание расходуемой двигателем мощности для сельскохозяйственных машин  кВт. Средняя загрузка двигателя при его номинальной мощности 59 кВт (n = 2200 об/мин) составляет около 61%, а загрузка двигателя в диапазоне мощности
кВт. Средняя загрузка двигателя при его номинальной мощности 59 кВт (n = 2200 об/мин) составляет около 61%, а загрузка двигателя в диапазоне мощности  соответственно, 15,60 и 14,41 (сюда входят 73,7% рассматриваемых машин). Лишь 13% сельскохозяйственных машин обеспечивают загрузку двигателя более чем на 95%). При установке на машину двигателя постоянной мощности (запас крутящего момента 25...27%) частота вращения коленчатого вала двигателя может снижаться до 27,5 с-1 (1650 об/мин), после чего производится переключение коробки передач на более низкую ступень.
соответственно, 15,60 и 14,41 (сюда входят 73,7% рассматриваемых машин). Лишь 13% сельскохозяйственных машин обеспечивают загрузку двигателя более чем на 95%). При установке на машину двигателя постоянной мощности (запас крутящего момента 25...27%) частота вращения коленчатого вала двигателя может снижаться до 27,5 с-1 (1650 об/мин), после чего производится переключение коробки передач на более низкую ступень.
Минимальное значение потерь мощности двигателя на дросселировании потока тормоза Н может быть получено, если механизм автоматического поддержания заданного значения частоты вращения хвостовика 24, 25 ВОМ будет иметь параметры, обеспечивающие передаточное число планетарного ряда I, близкое к iImin. Увеличение iI достигается дросселированием потока от насоса 31, который подается по гидролинии 29 к дроссельному регулятору 9. Величина потока зависит от величины тормозного момента Н на солнечной шестерне 16 планетарного ряда I.

где Mк - крутящий момент на валу коронной шестерни 12 планетарного ряда I. В нашем случае Mк = (Z3/Z2)Mд.
Тормозной момент Н при отсутствии дросселя потока насоса 31 практически равен нулю (если пренебречь силами трения), а солнечная шестерня 15 вращается в обратном первоначальному направлению, т.к. водило 14 остановлено под действием сил сопротивления, приложенных к нему через хвостовик 24 или 25. Забор жидкости через магистраль 29 исключается обратным клапаном 30. Плавное снижение силы сопротивления от грузов 5 датчика 4 приводит к перемещению золотника 8 влево под действием усилия пружины 10, дросселирование потока возрастает и солнечная шестерня 15 затормаживается, снижая передаточное число в приводе. Полная ее остановка соответствует минимальному значению передаточного числа  . Таким образом осуществляется пуск и остановка хвостовика ВОМ 24 или 25.
. Таким образом осуществляется пуск и остановка хвостовика ВОМ 24 или 25.
Контроль величины потока в сливной магистрали 26 осуществляется с помощью датчика расхода 27, а визуально определяется электрическим сигналом лампочки 28.
При отсутствии слива через магистраль 26 электрическая лампочка 28 гаснет, что свидетельствует об отсутствии гидравлических потерь в приводе ВОМ.
Если в результате передачи мощности на привод машин (рабочих органов) через ВОМ частота вращения коленчатого вала двигателя увеличивается, то шток 6 центробежного датчика 4 под действием центробежной силы грузов 5 перемещается вправо до тех пор, пока не наступит равновесие сил: натяжения пружины 10 и силы грузов 5. При этом золотник 8 также смещается вправо и открывается слив потока насоса 31 через магистраль 26. Передаточное число регулируемого планетарного ряда I возрастает до тех пор, пока не наступит новое равновесие сил. Диапазон изменения передаточного числа регулируемого планетарного ряда I находится в пределах изменения частоты вращения коленчатого вала 1 двигателя Д под действием колебания нагрузки (сопротивления рабочих органов) машин.
Конструкция привода независимого ВОМ обеспечивает две частоты вращения вала ВОМ 16,67 с-1 и 9 с-1. Блочно-модульное построение привода ВОМ позволяет поставлять (по заказу) потребителю как односкоростной, так и двухскоростной привод ВОМ.
Высокий КПД привода ВОМ обеспечивается за счет снижения потерь на дросселирование потока жидкости на сливе. В свою очередь это достигается за счет узкого (±10%) диапазона регулирования передаточного числа, т.к. номинальные обороты ВОМ находятся в зоне наиболее вероятной загрузки двигателя, который работает на частичной характеристике, а передаточное число регулируемого планетарного ряда I близко к iImin. При этом золотник 8 дроссельного регулятора заперт и потери от дросселирования потока близки к нулю.
Источники информации
1. И.П.Ксеневич. Тракторы МТЗ-100 и МТЗ-102. - М.: Агропромиздат, 1986, с. 256.
2. Авт.св. СССР N 507464, кл. B 60 K 17/10, 1975.
3. Авт.св. СССР N 747746, кл. B 60 K 17/28, 1980 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСМИССИЯ ВНЕДОРОЖНЫХ МАШИН, ПРЕИМУЩЕСТВЕННО ТРАКТОРОВ | 1999 |
|
RU2162799C2 |
| ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ ПРЕИМУЩЕСТВЕННО СЕЛЬСКОХОЗЯЙСТВЕННОГО НАЗНАЧЕНИЯ | 1994 |
|
RU2041583C1 |
| Механизм привода задних валов отбора мощности универсально-пропашного трактора | 1990 |
|
SU1782785A1 |
| ДВУХСКОРОСТНОЙ МЕХАНИЗМ ПРИВОДА ВАЛОВ ОТБОРА МОЩНОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2025305C1 |
| ДВУХПОТОЧНЫЙ ПРИВОД ВАЛА ОТБОРА МОЩНОСТИ ТРАКТОРА | 2012 |
|
RU2506175C1 |
| ДВУХСКОРОСТНОЙ МЕХАНИЗМ ПРИВОДА ЗАДНЕГО ВАЛА ОТБОРА МОЩНОСТИ УНИВЕРСАЛЬНО-ПРОПАШНОГО ТРАКТОРА | 1991 |
|
RU2025306C1 |
| Гидрообъемный ходоуменьшитель самоходной машины | 1971 |
|
SU472031A1 |
| Гидромеханическая передача для транспортной машины | 1971 |
|
SU449832A1 |
| Способ повышения точности настройки системы отбора мощности транспортных средств и устройство для его осуществления | 1990 |
|
SU1801801A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРИВОДОМ ЗАДНЕГО ВАЛА ОТБОРА МОЩНОСТИ С ПЛАНЕТАРНЫМ РЕДУКТОРОМ САМОХОДНОГО ЭНЕРГЕТИЧЕСКОГО СРЕДСТВА | 1995 |
|
RU2122952C1 |
Изобретение относится к тракторному машиностроению. Привод независимого вала отбора мощности содержит насос и двухступенчатый редуктор. Первая ступень редуктора выполнена в виде трехзвенного дифференциального механизма с передаточным числом i = К+1/К, а вторая ступень - в виде планетарного ряда с передаточным числом i = 1+К, где К - характеристика планетарного ряда. Одно звено планетарного ряда связано с насосом. Напорная магистраль насоса включает обратный клапан и дроссельный регулятор. Такое выполнение привода позволяет поддерживать заданную частоту вращения независимого вала отбора мощности при переменных нагрузках и работе двигателя на скоростных режимах. Упрощена конструкция привода. 1 з.п. ф-лы, 2 ил.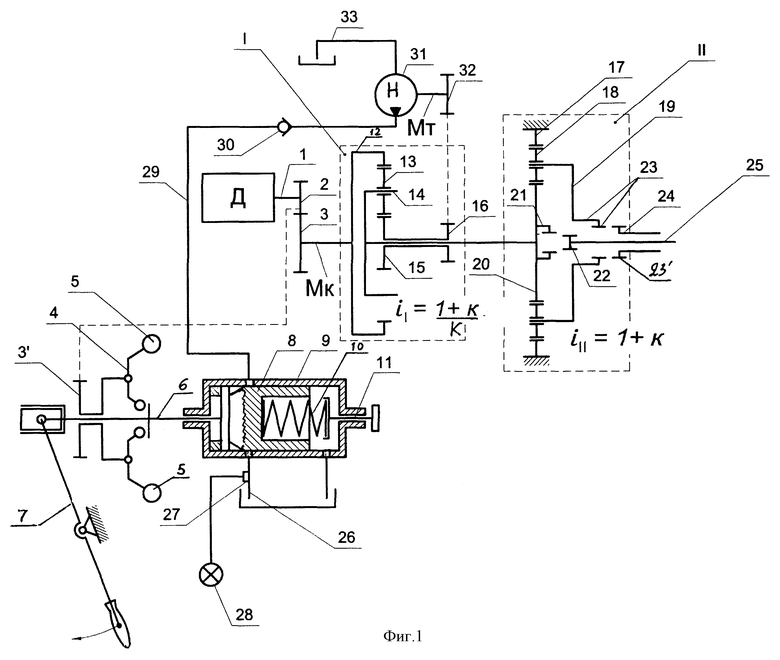

а вторая - с передаточным числом
i = I + K,
где К - характеристика планетарного ряда.
| Привод независимого вала отбора мощности транспортного средства | 1977 |
|
SU747746A1 |
| Механизм привода вала отбора мощности транспортного средства | 1988 |
|
SU1532337A1 |
| ВАЛ ОТБОРА МОЩНОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2030306C1 |
| Гидромеханический привод самоходной машины | 1974 |
|
SU507464A1 |
| ГИДРОСИСТЕМА ТРАКТОРА | 1995 |
|
RU2084355C1 |
