Изобретение относится к навигационному приборостроению, в частности к курсовым системам, и может быть использовано на подвижных объектах 5 для определения их местоположения относительно магнитного поля Земли.
Известно устройство для измерения направления магнитного поля, в котором носителем информации о направле- fQ НИИ магнитного поля является фаза электрического сигнала, при этом сигнальные обмотки магчиточувствительных элементов (МЧЭ) датчика направления магнитного поля подключены к входу е фазосдвигаклцего блока (ФСБ) , а обмотки возбуждения МЧЭ соединены с источником возбуждения .
Такие устройства имеют недостаточf yro точность, обусловленную частотной Ногрешностью из-за нестабильности и разностабильности частот источника возбуждения МЧЭ датчика к генератора счетных импульсов.
Наиболее близким по технической 25 сущности к предлагаемому является устройство для измерения магнитного курса, в котором информация о магнитном курсе преобразуется в фазу электрического сигнала путем использова- jn
ния ФСБ, включенного между сигнальными обмотками МЧЭ датчика и суммирующим элементом, а уменьшение частотной погрешности происходит синхронизацией частот путем использования единственного генератора и преобразователя частоты в В1ще делителей частоты .
Недостатком устройства является неудовлетворительная точность из-за ограничения возможностей уменьшения частотной погрешности.
Цель изобретения - уменьшение частотной погрешности.
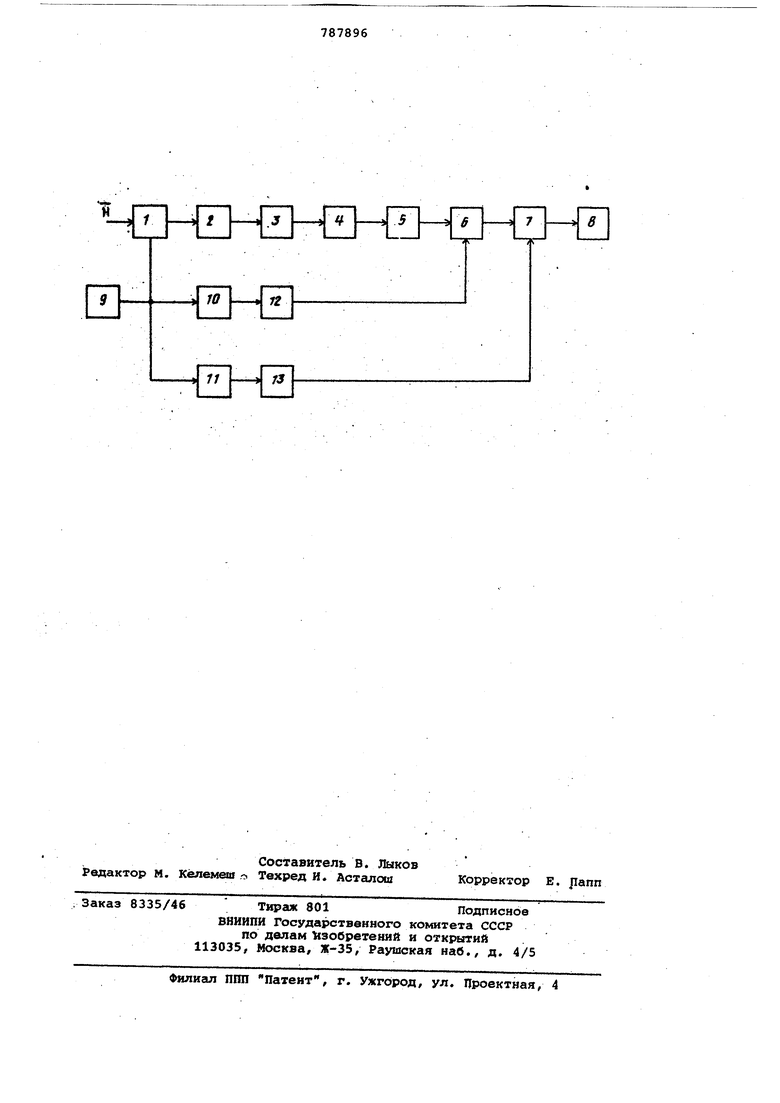
Поставленная цель достигается тем, что в устройстве для измерения магнитного курса, содержащем датчик проекций горизонтальной составляквдей вектора напряженности геомагнитного поля, генератор, фазосдвигающий блок, суммирующий длемент, фильтр, формирующий блок, блок интервала времени, ключ, счетчик, два преобразователя частоты и два формирующих блока, выход датчика проекций горизонтальной составляющей вектора напряженности геомагнитного поля последовательно через фаэосдвигающий блок, суммирующий элемент, фильтр, формирующий блок, блок интервала времени, ключ связан е входом счетчика, а вход, связан с выходом генератора и одновременно через первый преобразовател частоты и первый формирующий блок св зан со вторымвходом блока интервала времени, а через второй преобразователь частоты и второй формирунлдий блок связан с вторым входом ключа. На чертеже изображена структурная Ьхема предлагаемого устройства. Устройство содержит датчик 1 проекций гЬризонтальной составлякшдей вектора напряженности геомагнитного поля, соединенный своими сигнальными обмотками с входом фазослвигающего блока 2,.Выход фазосдвигающего блока 2 через последовательно включенные суммирующий элемент 3, фильтр 4, фор мирующий блок 5 соединен с одним из входов блока б интервала времени. Выход блока 6 интервала времени подключен к одному из входов ключа 7, выход которого соединен с входом сче чика 8. Выход генератора 9 соединен с обмоткой возбуждения датчика 1 и входами умножителей 10 и 11 частоты. Выход умножителя 10 частоты через Формирующий блок 12 подключен к другому входу блока 6 интервала времени Выход умножителя 11 частоты через формирующий блок 13 подключен к дру гому входу ключа 7. Датчик 1 состоит из двух МЧЭ в ви де взаимно перпендикулярных феррозон дов, помещенных на стабилизированной в горизонте при помощи гироскопа или двухосного маятникового подвеса площадке. При этом магнитная ось одного из феррозондов направлена вдоль гори зонтальной составляющей продольной оси объекта. Устройство- работает следующим образом. Синусоидальное напряжение генератора 9 вида Uf Uf,,, sin 2u.fp-t, где fj, частота, поступает на обмот ки возбуждения МЧЭ датчика 1 и входы умножителей 10 и 11 частоты. Горизон тальная составляющая Н (см. чертеж) вектора напряженности магнитного поля Земли наводит в сигнальных обмотках МЧЭ датчика 1 ЭДС, четные гармоники е, и е которых могут быть представлены как Kj, sin Ц) sin2ii-nfj,-t sfn2it-nfp;. t (1) где ( - магнитный курс объекта; Кр.- коэффициенты передачи Феррозондов;п 2, 4, 6... - номера четных гармоник, Фазосдвигашзщий блок 2 осуществляе сдвиг по фазе одного из напряжений (1) относительно другого на уголк/2. Выходные напряжения фазосдвигагацего блока 2 суммируются или вьрлитаются в суммирующем элементе 3. Фильтр 4 из спектра выходного напряжения суммирующего элемента 3 вьзделяет одну четную гармонику, например вторую (). Одновременно фильтр 4 задерживает вредные нечетные гармоники, имеющиеся во входном сигнале из-за неидентичности полуэлементов феррозондов. Таким образом, вторая гармоника выходного напряжения фильтра 4 при отсутствии ошибок элементов 1, 2, 3 может быть записано в виде: Уф KsinCiK fp, t - ц ) где К К2, Кб, Кз, К, К, К коэффициенты передач соответственно фазосдвигакядего блока 2, суммирующего элемента 3 и фильтра 4. Формирующий блок 5 формирует из выходного напряжения фильтра 4 короткие импульсы с крутым передним фронтом, привязанные во времени к- моментам перехода этого напряжения от отрицательных значений к положительным, в этом случае моменты времени формирования выходных импульсов формирователем 5 могут быть охарактеризованы формулой где m О, 2, 4, 6.... Умножители 10 и 11 частоты преобразуют сигналы генератора 9 в переменные .сигналы с частотами fjn и соответственно. Формирователями 12 и 13 осуществляется формирование из выходных сигналов умножителей 10 и 12 частоты коротких импульсов, соответствукхцих одному периоду этих сигналов. В этом случае моменты времени t, t3формирования выходных импульсов соответственно формирователей 12 и 13 равны m С.) . Выходные импульсы формирователей 5 и 12 управляют блоком б интервгша времени, имеющего следунвдую логику работы. Если на входах блока б нет выходных импульсов формирователей 5 и 12, то выходного сигнала блока б тоже нет. При поступлении на входы блока б выходного импульса формирователя 5 или 12, на выходе блока б появляется сигнал. Выходной сигнал ,блока б появляется и. в случае одновременного поступления на входы блока б выходных импульсов формирователей 5 и 12. При этом моменты начала или конца выходного сигнала блока б определяются моментами поступления одноименных (передних или задних) фронтов выходных импульсов формирователей 5 и 12. Таким образом, блок б интервала времени вырабатывает близкий к прямоугольной форме импульс с длительностью, равно промежутку времени д t между момента ми формирования t выходных импульсов формирователя 5 и моментами формирования t2 выходных импульсов формирователя 12, т. е. t - t2 Л t С учетом {3) и (4) получим m Ц m %-/2f7o 4 i. Ключ 7, открываясь передним фронтом выходного импульса блока б интер вала времени, пропускает на счетчик 8 выходные импульсы формирователя 13 имеющих период следования Т -jr. Зад ним фронтом выходного импульса блока 6интервала времени ключ 7 закрывает ся, запрещая тем самым проход выходных импульсов формирователя 13 -на счетчик 8. В открытом состоянии ключ 7через него на счетчик 8 с формирователя 13 поступит число импульсов, равное Подставляя (4) и (б) в (5), из (7)по лучим 4Т71()4-|т,Г « Из выражения (8) видно, что количество импульсов N, зарегистрированное счетчиком 8, соответствует измеряемому магнитному курсу и является одновременно функцией частот f , f fР. Последнее обуславливает неоднозначность выходной характеристики устройства. Если частоты выходных си HeUiOB умножителей 10 и 11 частоты связаны с частотой генератора 9 зависимостямиЮ о г Г fr где , К - коэффициенты преобразования (умножения) умножителей 10 и 12 частоты соответственно, и кроме того, выполняется Т20 . 10 (Р 1,2,3...) (10) ТО выражение (8) может быть записано как V 8-N {щ где 6 10 - цена выходного импульса формирователя 11. Таким образом, обеспечение условий (9), (10) позволяет простым образом устранить неоднозначность характеристики магнитный курс - число импульсов и осуществить съем показаний со счетчика 8 в единицах измерения магнитного курса, т. е. в градусной мере. Отсутствие в устройстве специального формирующего блока для выработки сигналов возбуждения датчика путем преобразования выходных сигналов генератора в необходимую форму и усиления их по мощности до требуемого уровня, расширяет возможности уменьшения частотной погрешности, что является основным преимуществом предлагаемого устройства. Формула изобретения Устройство для измерения магнитного курса, содержащее датчик проек- ций горизонтоьпьной составляющей вектора напряженности геомагнитного поля, генератор, фазосдвигающий блок, суммирукнций элемент, фильтр, формирующий блок, блок интервала времени, ключ, счетчик, два преобразователя частоты и два формирующих блока, отличающееся тем, что,, с целью уменьшения частотной погрешности, выход датчика проекций горизонтальной составляющей вектора напряженности геомагнитного поля последовательно через фазосдвигающий блок, суммирующий злемент, фильтр, формирующий блок, блок интервала времени, ключ связан с входом счетчика, а вход связан с выходом генератора и одновременно через первый преобразователь частоты и первый формирующий блок связан со вторым входом блока интервала времени, а через второй преобразователь частоты и второй формирующий блок связан со вторым входом ключа. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 220530, кл. G 01 В 3/00, 08.10.66. 2.Авторское свидетельство СССР по заявке № 2474164/18-10, кл. G 01 С 17/30, 31.10.77 (прототип) .


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения магнитного курса | 1977 |
|
SU669189A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2000 |
|
RU2171995C1 |
| Преобразователь азимута инклинометра | 1981 |
|
SU1002547A1 |
| Устройство для измерения ускорений | 2022 |
|
RU2793846C1 |
| Умножитель частоты | 1990 |
|
SU1797113A1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2011 |
|
RU2478212C1 |
| АКСЕЛЕРОМЕТР | 2011 |
|
RU2481588C1 |
| Устройство учета расхода материала при порционном дозировании | 1982 |
|
SU1068726A1 |
| Устройство для счета движущихся объектов | 1985 |
|
SU1312623A1 |
| Способ мониторинга геоиндуцированного тока в нейтрали силового трансформатора и управления режимом заземления | 2022 |
|
RU2794749C1 |