Изобретение относится к электроприводам, склонным к колебаниям под действием управляющих и возмущающих воздействий. Известен электропривод постоянного тока, содержащий двигатель, питаемый от управляемого преобразователя, подключенный к управляющему входу преобразователя, тахогенератор, соединенные последовательно датчик тока с фильтром, фазосмещающий элемент, представлягаций собой реальное дифференцирующее звено, и усилитель, обра зующие цепь отрицательной обратной связи, обеспечивающей компенсацию ко лебаний электропривода 1. Недостатками этого устройства явл ются увеличенное время переходных процессов, вызываемых наличием непре рывной линейной гибкой обратной свйзи по току и уменьшающее производи-, тельность, а также инерционность используемого реального дифференцирующего звена в цепи обратной связи по току, что ухудшает демпфируняцие свой ства электропривода. Наиболее близок к предлагаемому по технической сущности и достигаемо результату э гектропривод постоянного тока, содержащий питающий двигатель преобразователь, соединенные последовательно регуляторы тока и частоты вращения с включенными на их входах элементами сравнения и подключенными к входам элементов сравнения датчиками тока и частоты вращения, а также датчик производной тока (или датчик производной частоты вращения), выполненный в виде дифференцирующего звена, включенного между выходом датчика тока и входом элемента суммирования регулятора тока 2. Недостатком известного электропривода является уменьшенное быстродействие вследствие наличия непрерывной линейной гибкой обратной связи по току якоря, затягивающей переходные процессы при управляющем воздействии, и недостаточная эффективность демпфирования колебаний вследствие неизбежной при реализации датчика производной тока в виде дифференцирующего звена инерционности реального блока дифференцирования, постоянная времени которого сравнима с коэффициентом усипения сигнала гибкой обратной связи, и определяемой этим недостаточной точности дифференцирования.
Цель изобретения - повышение быстродействия и эффективности демпфирования колебаний электропривода.
Поставленная цель достигается тем, что в электропривод постоянного тока, содержащий подключенный к двигателю с обмоткой дополнительных полюсов и компенсационной обмоткой преобразователь, соединенные последовательно регуляторы тока и частоты вращения с включенными на их входах элементами сравнения и подключенными ко входам элементов сравнения датчиками тока и частоты вращения, а также датчик производной тока, введены включенный между выходом датчика производной тока и входом регулятора тока операционный усилитель, блок выделения модуля и блок перемножения, причем выход блока перемножения подключен ко входу операционного усилителя, а два его входа соединены соответственно с выходом операционного усилителя и через блок выделения модуля - с выходом элемента сравнения регулятора тока.
Достижение указанной цели обеспечивается также выполнением датчика производной тока (в электроприводе с вклченными в цепи якоря двигателя обмотками дополнительных полюсов и компенсационной) либо в виде двух резисторов, соединенных последовательно и включенных параллельно обмоткам допол нительных полюсов и компенсационной, и усилителя, вход которого подключен к средним точкам между указанными обмотками и резисторами, либо в виде двух последовательно соединенных oneрационных усилителей, в цепи обратной связи первого из которых включен терморезистор, и подключенного к зажимам указанных выше обмоток дополнительных полюсов и компенсационной потенциального разделителя, выход которого соединен со входом второго операционного усилителя, а вход первого операционного усилителя соединен с выходом датчика тока.
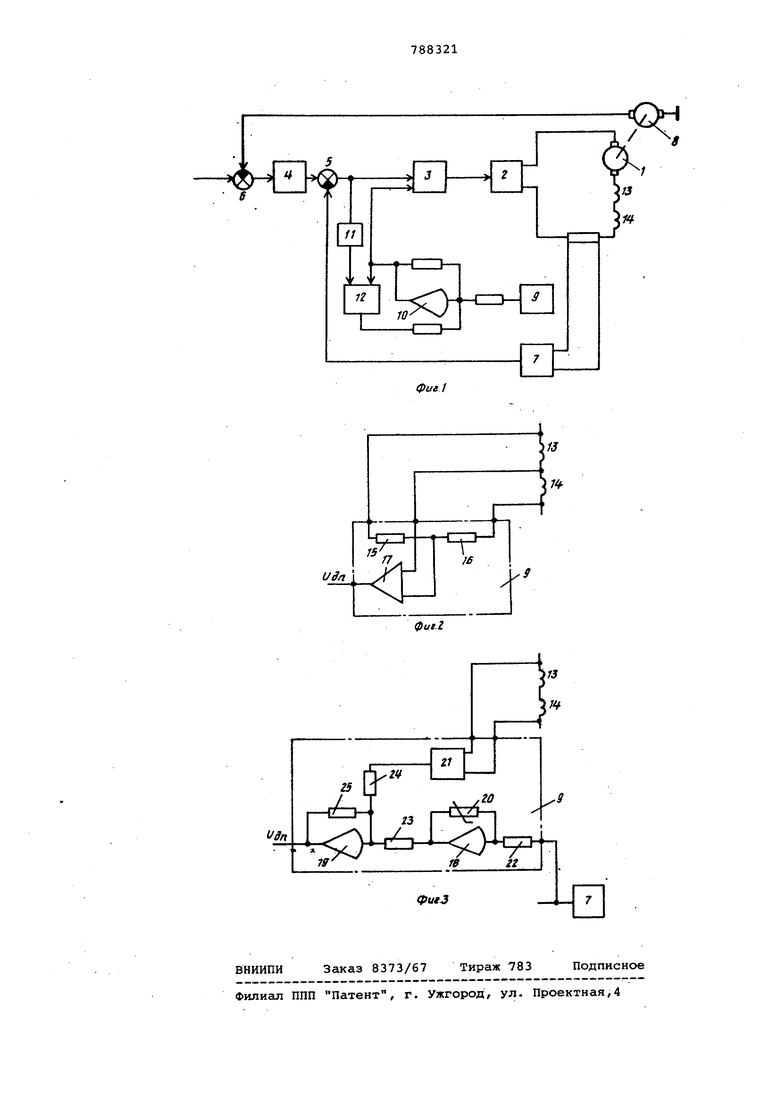
На фиг. 1 приведена схема предлагаемого электропривода, на фиг. 2 и 3 - варианты выполнения датчика производной тока.
Электропривод содержит питающий двигатель 1 преобразователь 2, соедине.нные последовательно регуляторы тока 3 и частоты вращения 4 с включеннйми на их входах элементами 5 и 6 сравнения и подключенными ко входам элементов сравнения датчиками тока 7 и частоты вращения 8, а также датчик 9 производной тока. В электропривод введены включенный между выходом датчика 9 производной тока и входом регулятора 3 тока операционный усилитель 10, блок 11 выделения модуля и блок 1 перемножения, причем выход блока 12 перемножения подключен ко входу операционного усилителя 10, а два его входа соединены соответственно с выходом
операционного усилителя 10 и через. блок 11 выделения модуля с выходом элемента 5 сравнения регулятора тока.
Для электропривода с включенными в цепи якоря двигателя обмотки 13 дополнительных полюсов и компенсационно обмотки 14 предложено два варианта выполнения датчика 9 производной тока.
В соответствии с первым вариантом (фиг..2) этот датчик выполнен в виде двух резисторов 15 и 16, соединенных последовательно и включенных параллельно обмоткам дополнительных полюсов 13 и компенсационной 14, и усилителя 17, вход которого подключен к средним точкам между указанными обмотками 13 и 14 и резисторами 16 и 15.
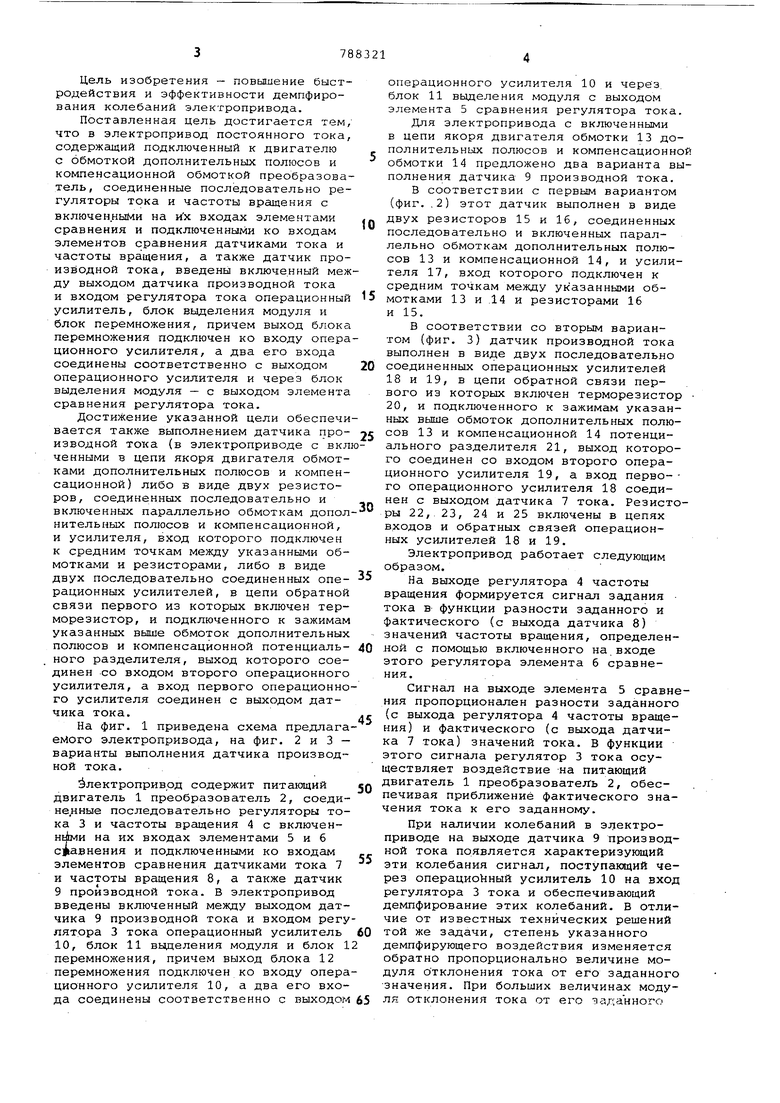
В соответствии со вторым вариантом (фиг. 3) датчик производной тока выполнен в виде двух последовательно соединенных операционных усилителей 18 и 19, в цепи обратной связи первого из которых включен терморезистор 20, и подключенного к зажимам указанных выше обмоток дополнительных полюсов 13 и компенсационной 14 потенциального разделителя 21, выход которого соединен со входом второго операционного усилителя 19, а вход первого операционного усилителя 18 соединен с выходом датчика 7 тока. Резисторы 22,23, 24 и 25 включены в цепях входов и обратных связей операционных усилителей 18 и 19.
Электропривод работает следующим образом.
На выходе регулятора 4 частоты вращения формируется сигнал задания тока в функции разности заданного и фактического (с выхода датчика 8) значений частоты вращения, определенной с помощью включенного на входе этого регулятора элемента 6 сравнения. ,
Сигнал на выходе элемента 5 сравнения пропорционален разности заданного (с выхода регулятора 4 частоты вращения) и фактического (с выхода датчика 7 тока) значений тока, в функции этого сигнала регулятор 3 тока осуществляет воздействие на питающий двигатель 1 преобразователь 2, обеспечивая приближение фактического значения тока к его заданному.
При наличии колебаний в электроприводе на выходе датчика 9 производной тока появляется характеризующий эти колебания сигнал, поступаклций через операционный усилитель 10 на вход регулятора 3 тока и обеспечивающий демпфирование этих колебаний. В отличие от известных технических решений той же задачи, степень указанного демпфирующего воздействия изменяется обратно пропорционально величине модуля Отклонения тока от его заданного значения. При больших величинах модуля отклонения тока от его Т1аданного значения пропорциональный ему сигнал с выхода блока 11 выделения модуля, умноженный на выходной сигнал операционного усилителя 10, с выхода блока 12 перемножения поступает на вход операционного усилителя 10, причем поскольку знак выходного сигнала блока 12 перемножения всегда противоположен знаку сигнала с выхода датчика 9 производной тока, воздействие с выхода операционного усилителя 10 на вход регулятора тока существенно уменьшается. При этом регулятор 3 тока осуществляет воздействие на питающий двигатель 1 преобразователь 2 практически только в функции сигнала, поступающего с выхода элемента 5 сравнения и пропорционального отклонению тока от заданного значения, обеспечивая быстрое приближение величины тока к его заданному значению, а сигнал с выхода операционного усилителя 10, вследствие его малости, не препятствует быстрому изменению тока, определяемому настройкой контура тока, что способствует уменьшению длительности переходного процесса и повышению быстродействия электропривода. При приближении к нулю модуля отклонения тока от его заданного значения приближаются к нулю также выходные сигналы блока 11 выделения модуля и блока 12 перемножения, а выходной сигнал операционного усилителя 10 возрастает, увеличивая демпфирующее воздействие на вход регулятора 3 тока, что препятствует появлению сущест венного перерегулирования тока и увеличивает эффективность демпфирования колебаний электропривода. Аналогично может быть реализовано предложение при использовании вместЬ датчика 9 производной тока якоря датчика производной частоты вращения, при этом блок выделения 11 модуля под ключается к выходу элемента сравнения регулятора частоты вращения. Такое выполнение устройства целесообразно в случае, если период колебаний элект ропривода больше времени разгона и ре верса двигателя. Таким образом, предлагаемое устройство позволяет существенно уменьшить противоречивость решений, вытекающих из необходимости обеспечения высокого быстродействия электроприво да j с одной стороны, и необходимости обеспечения высокой эффективности демпфирования колебаний, с другой, и благодаря этому повысить как быстродействие, так и эффективность демп фирования колебаний. Решению этой за дачи способствуют также предложенные выполнения датчика 9 производной тока, не требующие введения реашьных дифференцирующих звеньев. При выполнении датчика 9 производ -- тока в соответствии с фиг. 2 в электропривод с включением в цепи якоря двигатели обмотками дополнительных полюсов 13 и компенсациоянон 14 введены два дополнительных резистора 15 и 16 и усилитель 17. При этом выходное напряжение ид|д датчика 9 производной тока D при выборе величин резисторов 15 и 16 в соответствии с условием 14 16 Ii где R R| сопротивления резисторов 15 и 16; R,,Rj. - сопротивления обмоток дополнительных полюсов 13 и компенсационной 14, определяется зависимостью Kcj . к- р--1 1 - рТ L) R,34 R,4 RIS- Ri6 klUL-Lil l 14 6 индуктивности обмоЗдесь L ток 13 и 14; К и - коэффициент усиления усилителя 17; р - оператор дифференцирования. Поскольку передаточный коэффициент К схек1Ы, включающей резисторы 15 и 16 и обмотки 13 и 14, как следует из выражения (3), практически не зависит от величин сопротивлений резисторов 15 и 16 (величина R15 + i значительно больше величины R|3 + Ri4 , а изменение ва.пичины резисторов 15 и 16 при соблюдении условия (1) при этом приводит к пропорциональному изменению числителя и знаменателя выражения (3), увеличением сопротивлений резисторов 15 и 16 можно обеспечить достаточно малое значение постоянной времени Т, существенно меньше периода колебаний электропривода, в результате чего напряжение практически пропорционально производной токаидп Ку-. К.р .1 (5) При этом температурный режим двигателя практически не сказывается на точности определения производной тока как вследствие указанной выше практической независимости коэффициента К от величин сопротивлений обмоток 13 и 14, так и вследствие того, что указанные обмотки находятся в одинаковом температурном режиме, что обеспечивает выполнение условия (1) при колГебаниях температуры этих обмоток. Если в электроприводе в качестве преобразователя 2 применен генератор, вместо обмоток 13 и 14 двигателя (или вместе с ними при последовательном их соединении) могут быть использованы аналогичные обмотки генератора, включенные в цепь якоря. При выборе Обмоток для использования в датчике производной тока следует принять во внимание, что коэффициент усиления этого датчика тем больше, чем больше разность постоянных времени используемых обмоток. Если допустимо некоторое, снижение жесткости механической характеристики электропривода и увеличение потерь в якорной цепи, дл увеличения этого коэффициента вмес то одной из обмоток можно использовать включенный в якорную цепь и ус тановленный в одинаковых с обмоткой температурных условиях резистор, Второй вариант выполнения датчика 9 производной тока (фиг. 3) требует введения потенциального раздел теля 21 и двух операционных усилите лей 18 и 19, в цепи обратной связи первого из которых включен терморезистор 20. В датчике осуществляется вычитание напряжения, снимаемого с обмот дополнительных полюсов 13 и компенсационной 14 и включающего составляющую, пропорциональную производно тока, и выходного напряжения датчика 7 тока. Парс1метры входящих в датчик 9 эл ментов выбираются согласно условию R20.1R24 Knp(RiM: RI ), iZ -i где К , Кд-р - передаточные коэффицие ты потенциаипьного разд лителя 21 и датчика 7 ка, а индексы резисторов соответствуют их н мерам в схеме. При этом выходное напряжение U. пропорционально производной тока Кдп - 4p|f () ПР R24 Включение в цепь обратной связи операционного усилителя 18 терморезистора 20, установленного в одинаковых с обмотками 13 и 14 температу ных условиях, обеспечивает сохранение условия (6) при колебаниях темп ратуры, что способствует обеспечени высокой точности определения производной и высокой эффективности демп фирования колебаний. Второй вариант выполнения датчик пвризводной тока требует большего к личества элементов по сравнению с первым, но обеспечивает получение большей (без учета дополнительного усиления в. первом варианте) величины выходного сигнала. Оба варианта выполнения датчика производной тока не требуют введени рвсшьных дифференцирующих звеньев с присущими им недостатками и обеспеч зают высокую точность без существен ной инерционности, а это позволяет вводить близкую к идеальной гибкую обратную связь по току, что повышает эффективность демпфирования колебаний, Таким образом, предлагаемый электропривод повышает быстродействие и эффективность демпфирования колебаний электропривода, что способствует повышению производительности, увеличению надежности и долговечности электропривода и связанного с ним механизма. Формула изобретения 1.Электропривод постоянного тока, содержащий подключенный к двигателю с обмоткой дополнительных полюсов и компенсационной обмоткой преобразователь, соединенные последовательно регуляторы тока и частоты вращения с включенными на их входах элементами сравнения и подключенными ко входам элементов сравнения датчиками тока и частоты вращения, а также датчик производной тока, отличающийся тем, что, с целью повышения быстродействия и эффективности демпфирования колебаний электропривода, в него введены включенный между выходом датчика производной тока и входом регулятора тока операционый усидитель, блок выделения модуля и блок перемножения, причем выход блока перемножения подключен ко входу операционного усилителя, а два -его входа соединены соответственно с выходом операционного усилителя и через блок выделения модуля - с выходом элемента сравнения регулятора тока, 2.Электропривод поп, 1, отличающийся тем, что датчик производной тока выполнен в виде двух резисторов, соединенных последовательно и включенных параллельно обмотке дополнительных полюсов и компенсационной обмотке двигателя, и усилителя, вход которого подключен к средним точкам между указанными обмотками и резисторами. 3.Электропривод по п,1, о т л ичающийсЯ тем, iTO датчик производной тока выполнен в виде двух последовательно соединенных операционных усилителей, в цепь обратной связи первого из которых включен терморезистор, и подключенного к зажимам обмотки дополнительных полюсов и компенсационной обмотки двигателя потенциального разделителя, вькод которого соединен со входом второго операционного усилителя, а вход первого операционного усилителя соединен с выходом датчика тока. Источники информации, принятые во внимание при экспертизе 1,Авторское свидетельство СССР № 339342, кл, Н 02 Р 5/00, 1968, 2, Электротехническая промышленность. Сборник. Сер. Электропривод, 1975, № б (41), с, 5-7, рис. 1.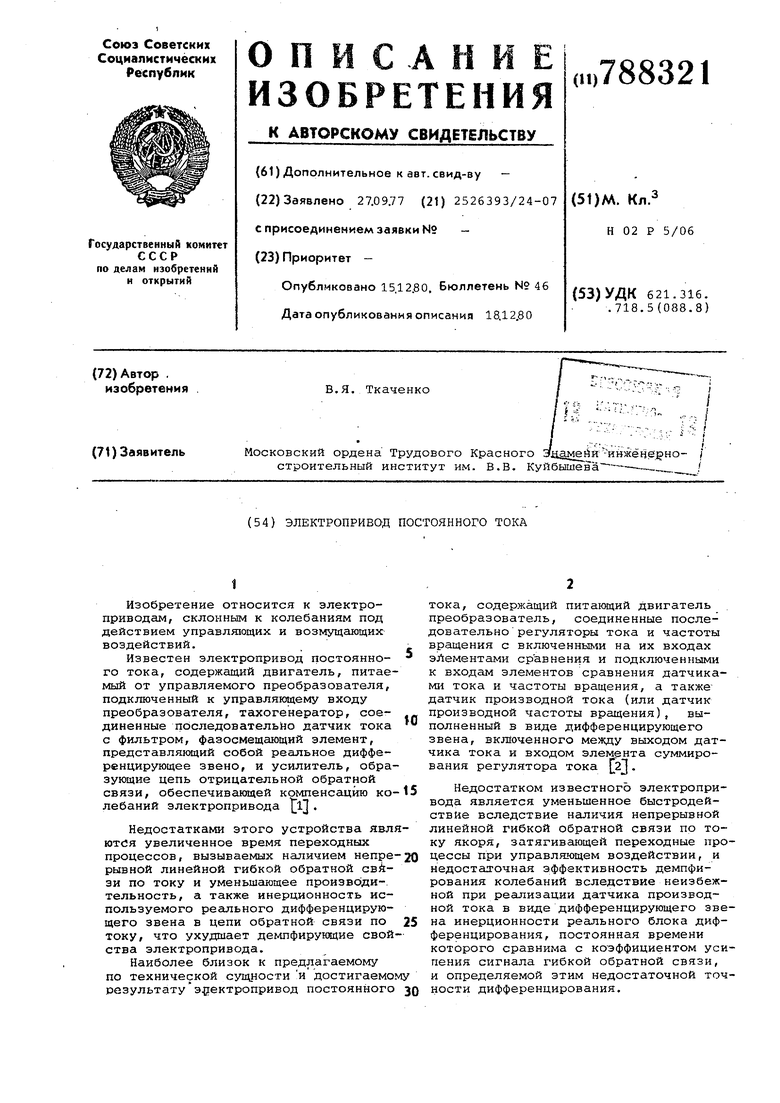

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1981 |
|
SU1022273A1 |
| Устройство для демпфирования колебаний в упругой связи между двигателем и механизмом электропривода | 1978 |
|
SU714607A1 |
| Реверсивный тиристорный электропривод с упругой передачей от двигателя к механизму | 1977 |
|
SU731539A1 |
| Способ демпфирования колебаний в элетроприводе и устройство для его осуществления | 1977 |
|
SU693525A1 |
| Устройство для регулирования момента в упругой трансмиссии электропривода | 1978 |
|
SU746846A1 |
| Устройство для ограничения тока нагрузки экскаваторного электропривода постоянного тока | 1980 |
|
SU1048066A1 |
| Устройство для двухзонного регулирования скорости | 1978 |
|
SU769694A2 |
| Частотно-регулируемый электропривод | 1989 |
|
SU1798884A1 |
| Электропривод постоянного тока | 1978 |
|
SU817953A1 |
| Устройство для управления шаговым двигателем | 1982 |
|
SU1102005A1 |