(54) УСТРОЙСТВО СВЯЗИ МЕЖДУ ДЛЯ ДЕМПФИРОВАНИЯ КОЛЕБАНИЙ В УПРУГОЙ ДВИГАТЕЛЕМ И МЕХАНИЗМОМ ЭЛЕКТРОПРИВОДА

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ демпфирования колебаний в элетроприводе и устройство для его осуществления | 1977 |
|
SU693525A1 |
| Устройство для испытания электроприводов | 1987 |
|
SU1515314A1 |
| Реверсивный тиристорный электропривод с упругой передачей от двигателя к механизму | 1977 |
|
SU731539A1 |
| Электропривод с упругой связью между электродвигателем и механизмом | 1981 |
|
SU1066012A1 |
| Электропривод переменного тока | 1977 |
|
SU1371513A3 |
| Устройство для управления асинхронным электроприводом | 1979 |
|
SU788325A1 |
| Способ управления электродвигателем скребкового конвейера и электропривод для его осуществления | 1988 |
|
SU1647839A1 |
| ЭЛЕКТРОПРИВОД ПЕРИОДИЧЕСКОГО ДВИЖЕНИЯ | 1998 |
|
RU2148293C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 1999 |
|
RU2169426C1 |
| Электропривод постоянного тока | 1977 |
|
SU788321A1 |
1
Изобретение относится к области электроприводов и может быть использовано в электроприводах с упругой связью между двигателем и механизмом, для зт еньшения колебаний электромеханической системы, например, в элекро- приводах горных и подъемно-транспортных машин, бумагоделательных и металлургических механизмов.
.Известно устрЬйство для демпфирования колебаний в упругой связи между двигателем и механизмом электропривода с последовательно включенными преобразователем, питающим двигатель, регулятором тока и регулятором частоты вращения, содержащее два установленных на валах двигателя и механизма
тахогенератора постоянного тока, подключенных к входу элемента сравнения, выход которого соединен со входом регулятора тока lJ .Это устройство увеличивает длитель- ность переходного процесса в электро-
приводе, что снижает его производительность..
Известно также устройство для демпфирования колебаний в упругой связи между двигателем и механизмом электропривода с последовательно соединенными регулятором частоты гфащения, регулятором тока и питающим двигатель управляемым преобразователем, содержащее два установленных на валах.двигателя
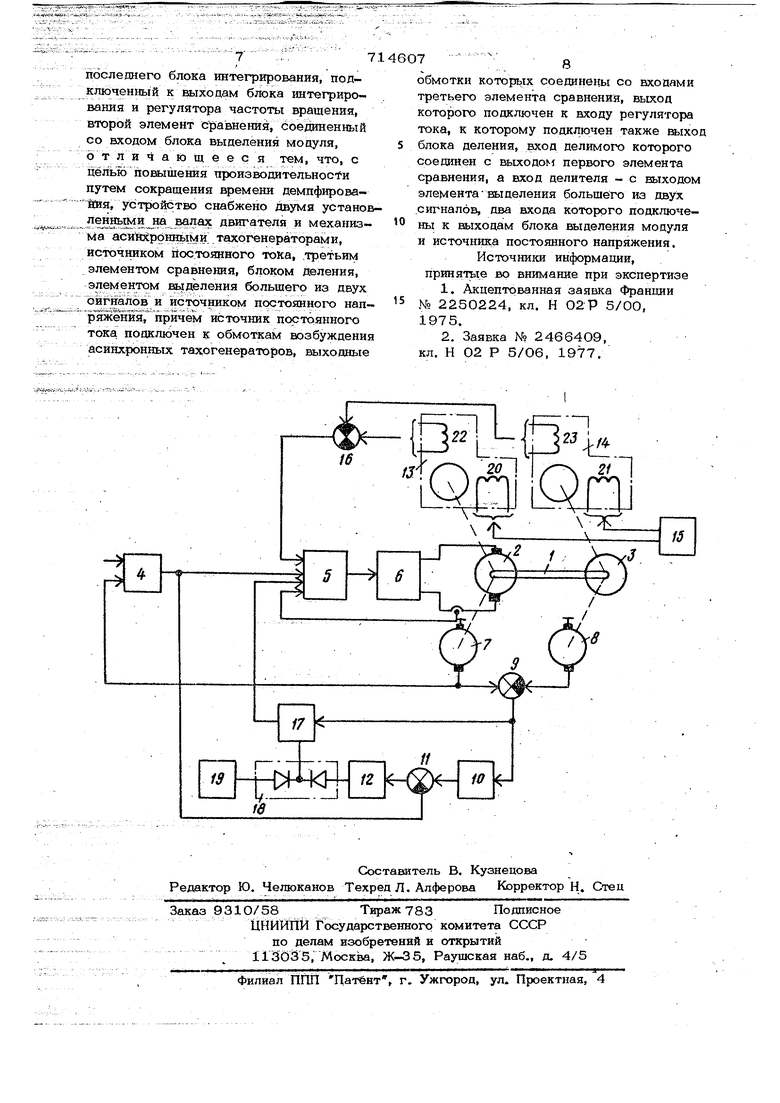
0 и механизма тахогенератора постоянного тока, подключенный к их ы 1ходам первый элемент сравнения, соединенный с выходом последнего блока интегрирования, подключенный к выходам блока
5 интегрирования и регулятора частоты вращения, второй элемент сравне1шя, подключенный к выходам первого и второго элементов сравнения, блок определения амплитуды колебаний, подключенный к входам регуляторов тока и частоты вращения блок перемножения, два входа которого соединены с вьгходами первого элемента сравнения и блока опрепелопия ймплитуды колебаний, который выполнен Б виде двух блоков выделения модуля, подключенных через нелинейные резис торы с параболической характеристикой к входам операционного усилителя, со -держащего в цепи обратной связи не линейный резистор с параболической характеристикой 2. Известное устройство обеспечивает эффективное уменьшение больших амплитуд колебаний, однако с уменьшением амплитуды колебаний, а также с уменьшением юс частоты эффективность демпфирования ук еньшается, что при высокюс требованиях и точности регулирования затягивает переходный процесс, увеличивает время демпфирования, а ,это снижает производительность. Цель, изобретения - понь1шение производительности путем сокрашешя времеии демпфирования. Эта цель достигается тем, что устройство для демпфирования колебаний в упругой связи между двигателем и механизмом электропривода с последовательно соединенными регулятором ток и питающим двигатель управляемым пре образователем, содержащее два установ ленных на валах двигателя и механизма тахогенератора постоянного тока, подключенный к их выходам первый элемен сравнения, соединенный с выходом последнего блока интегрирования, подключе ный к выходам блока интегрирования и регулятора частоты вращения, второй элемент сравнения, соединенный со вхо дом блока выделения модуля, снабжено двумя установленными на валах двигателя и механизма асинхронными тахоге нераторами, источником постоянного тока, третьим элементом сравнения, блоком деления, элементом вьшеления больщего из двух сигналов и источнико постоянного напряжения, причем источник постоянного тока подключен к обмоткам возбуждения ас1шхронных тахогенераторов, выходные обмотки которых соединены со входами третьего элемента сравнения, выход которого подключен к входу регулятора тока, к которому подключен также выход бло деления, вход делимого которого соеди нен с EbixonoM первого элемента сравнения, а вход делителя блока деления соединен с выходом элемента выделени большего из двух сигналов, два входа которого подключены к выходам блока ыделения модуля и источника постояного напряжения. На чертеже изображено предлагаемое стройство. Устройство для демпфировагтая колебаий в упругой связи 1 между двигателем 2 и механизмом 3 электропривода с последовательно соединенными регулятором 4 частоты вращения, регулятором 5 тока и питающим двигатель 2 управляемым преобразователем 6, содержащее два установленных на валах двгггателя 2 и механизма 3 тахогенератора 7-8 постоянного тока, подключенный к их выходам первый элемент 9 сравнения, соединенный с выходом после пнего блока 10 интегрироваьшя, подключенный к выходам блока 10 интегрирования и регулятора 4 частоты вращения, второй элемент 11 сравнения, соединенный со входом блока 12 выделения модуля, снабжено двумя установленными на валах двигателя 2 и мехашзма 3 асинхронными тахогенераторами 13 и 14, источником 1 5 постоянного тока, третьим элементом 16 сравнения, блоком 17 деления, элементом 18 выделения больщего из двух сигналов, источником 19 постоянного напряжения, причем источник 15 постоянного тока подключен к обмоткам 20-21 возбуждения асинхронных тахогенераторов 13 и 14, выходные обмотки которых 22 и 23 соединены со входами третьего элемента 16 сравнегшя, выход которого подключен к входу регулятора 5, к которому подключен также выход блока 17 деления, вход делимого которого с выходом первого элемента 9 сравнения, а вход делителя блока 17 деления соединен с выходом элемента 18 вьшеления большего из двух сигналов, два входа которого подключены к выходам блока 12 выделения модуля и источника 19 постоянного напряжения. Работает устройство следующим образом. При питании обмоток возбуждения 2О и 21 асинхронных тахОгенераторов 13 и 14 от источника 15 постоянного тока сигналы, снимаемые с выхоа11ых обмоток 22 и 23 этих тахогенераторов, пропорциональны ускорениям двигателя 2 и механизма 3, а разность этих сигналов, получаемая на выходе третьего) элемента 16 сравнения, поступает на вход регулятора 5 тока, образуя поло5жите льную обратную с вязь по второй производной момента нагрузки в упруго связи 1 между двигателем 2 и механи мом 3. Эта положительная обратная связь уменьшает колебательность электромех нической системы перерегулирования при одновременном сокращении демпфирования, что способствует повышению производительности. Одновременно на вход регулятора 5 ,тока через блок 17 деления поступает выходной сигнал первого элемента 9 сравнения, образуя отрицательную обратную связь по первой производной момента нагрузки в уп эугой связи. Вы ходной сигнал блока 1О интегрирования пропорциональный моменту нагрузки в упругой связи 1, сравнивается с выходным сигналом регулятора 4 частоты вращения, а сигнал рассогласования момента нагрузки в упругой связи с ныхода второго элемента 11 сравнения через блок 12 выделения модуля и чё рез элемент 18 выделения большего из двух сигналов поступает на вхЬд делителя блока 17 деления. При больших .значениях рассогласования момента нагрузки выходной сигнал блока 17 деления невелик, т.е. с ушественно уменьшается отрицательная обратная связь по первой производной момента нагрузки в упругой связи. При этом обеспечивается BbicoKoe быстродействие системы управле1шя электроприводом, которое увеличивается также действием сигнала положительной обратной связи по второй произБОПНой момента нагрузк поступающего на вход регулятора тока с выхода третьего элемента 16 сравнения, подключенного к выходным обмоткам асинхронных тахогенераторов 13 и 14, обмотки возбуждения которых соединены с выходом источника 15 постоянного тока. Благодаря этому величина момента нагрузки быстро приближается к установившемуся значению, что сокращает щэемя демпфирования колебаний. Уменьшение рассогласования момента нагрузки, т.е. приближение этого момента к установившемуся значению, уменьшаетсигнал, поступающий на вход делителя блока 17 деления с выхода второго элемента 11 сравнения. Это усиливает отрицательную обратную связь по первой производной момента нагрузки (с ы,1хода первого элемента 9 сравг 07 нения через блок 17 деления на вх.ои регулятора 5 тока), что уменьшает скорость изменения момента, препятствует появлению колебаний и перорегулирова- . НИИ, удерживая момент в зоне ег-о установившегося значения и тем самым обеспечивая быстрое окончание переходного процесса, сокращая время демпфирования. Минимальное значение сигнала на входе делителя блока 17 деления ограничивается вёЛй:чинЬй напряжения, поступающего с выхода источника 19 постоянного напряжения через элемент 18 выделения большого сигнала в случае, если выходной сигнал с выхода блока 12 выделения модуля станет меньше допустимой для нормальной работы блока 17 деления величины. Таким образом, предложение позволяет сократить щземя демпфрфования как при управляющих, так и при возмущающих воздействиях, что обеспечивает повышение производительности. При этом, практически исключая перерегулирования (или снижая их до допустимых значений), предложение позволяет не менее чем в 2 раза уменьшить время демпфирования. Если время переходных процессов при разгоне, торможении, реверсе, а также при изменении возмущающего момента нагрузки механизма составляло 10% времени работы механизма, предложение позволяло уменьщить его (при соблюдении ограничений на величину динамических нагрузок). До 5%, т.е. повысить производительность на 5%. Технико-экономическая эф{)ек- тивность предложения будет тем больше, . чем больше время механизм работает в переходных режимах, (например, горные машины, испытательные стенды, приводы прокатных станов и бумагопелательных машин). Формула изобретения Устройство для демпфировагшя колебаний в упругой свяои межпу двигателем и механизмом электропривода с последовательно соединенными регулятором частоть вращения, регулятором тока и питающим, двигатель управляемым, преобразователем, содержащее два установленных на вплах двигателя R механизма тахогенератора постоянного тока, подключенный к и.х иыхоцам первый алемент сравнения, соединенный с ЕЫХОЛОМ
