(54) ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1985 |
|
SU1339851A1 |
| Устройство для регулирования тока якоря электродвигателя | 1976 |
|
SU656169A1 |
| Электропривод постоянного тока | 1977 |
|
SU692044A1 |
| Способ защиты обмотки якоря электродвигателя от перегрева и устройство для его осуществления | 1984 |
|
SU1279010A1 |
| Устройство для двухзонного регулирования скорости | 1980 |
|
SU928577A2 |
| Электропривод постоянного тока | 1985 |
|
SU1332501A1 |
| Способ управления электроприводом постоянного тока механизма с пульсирующей нагрузккой на валу и устройство для его реализации | 1979 |
|
SU855909A1 |
| Способ управления электроприводом постоянного тока и устройство для его осуществления | 1977 |
|
SU705632A1 |
| Устройство для управления электродвигателем поворота экскаватора | 1985 |
|
SU1309233A1 |
| Устройство для управления электроприводом постоянного тока механизмов экскаватора | 1974 |
|
SU663794A2 |
I
Изобретение относится к быстродействующим системам управления числом оборотов электродвигателей постоянного тока, работающих с большим диапазоном регулирования тока возбуждения, изменения рабочих температур обмоток и температуры окружающей среды, и может быть применено в схемах управления электроприводами постоянного тока ротора буровых установок, станов непрерывной прокатки и волочения, а также металлообрабатывающих станков.
Для всех этих механизмов характерно
относительно длительное поддержание одного режима поскорости и температуре обмоток и быстрые изменения мгновенных значений нагрузки. Наибольшая постоянная времени контура управления частотой вращения таких приводов меняется в очень больших пределах. Так, например, диапазон изменения электромеханической постоянной времени в электроприводе с диапазоном изменения магнитного потока 3:1-4:1 составляет 1:(12-20). Поэтому оптимальная настройка регулятора числа оборотов подоб ного привода может существовать только для одного режима.
Известен электропривод постоянного тока с адаптивным регулированием скорости, в котором параметры регулятора, настроенного на некоторый средний режим объекта регулирования, корректируются в функции отклонения переходного процесса от процесса, задаваемого эталонной моделью. Устройство содержит эталонную модель скорректированного объекта, корректирующий последовательный фильтр, анализатор объекта регулирования и узел перестройки параметров регулятора 1.
Недостатки известного устройства состоят в его сложности, так как для его реализации требуется семь блоков интегрирования, шесть блоков умножения, два блока суммирования и два блока деления, а также в отсутствии ограничения регулируемой величины.
Наиболее близким к предлагаемому являе-вря электропривод, в котором осуществляется сравнение хода реального процесса X желаемым, получаемым на выходе эталонной модели скорректированного процесса, и изменение в функции отклонения реального процесса от эталонного коэффициента
передачи пропорционального регулятора тока якоря 2.
Однако указанный электропривод обеспечивает лишь статическое регулирование, в то время как ряд механизмов требует астатического. Большая разветвленность схемы требует сложного источника питания с многими потенциально развязанными выходами, снижает помехоустойчивость схемы и, в конечном результате, снижает ее надежность. Кроме того, такой электропривод предназначен для регулирования тока якорной цепи, диапазон изменения которой низок.
Цель изобретения - повышение надежности и расширение диапазона регулирования.
Указанная цель достигается тем, что в электропривод постоянного тока, содержаш,ий регулятор частоты врашения с подключенными к его входу задатчиком и датчиком частоты враш,ения и конденсатором в цепи обратной связи, регулятор тока якоря с присоединенным к его входу датчиком тока якоря в цепи управления преобразователем, питаюшим якорную цепь двигателя, и датчик тока возбуждения, введены датчик величины сопротивления якорной цепи, источник стабилизированного напряжения, узел определения электромеханической постоянной времени электропривода, усилитель мощности, резистор и расположенные в одном корпусе осветитель и два фоторезистора, при этом один из фоторезисторов включен последовательно с конденсатором в цепь обратной связи регулятора, осветитель подключен к выходу усилителя мош ности, вход которого последовательно с резистором подключен к выходу узла определения электромеханической постоянной времени, параллельно резистору включена цепь из второго фоторезистора и источника стабилизированного напряжения, входы узла определения электромеханической постоянной времени соединены с датчиками тока возбуждения и величины сопротивления якорной цепи, входы второго из которых включены в якорную цепь двигателя и к выходу источника стабилизированного напряжения.
Кроме того, узел определения электромеханической постоянной времени содержит два блока нелинейности и блок умножения, причем вход первого блока нелинейности является первым входом узла определения электромеханической постоянной времени, выход первого блока нелинейности присоединен к первому входу блока умножения, второй вход блока умножения является вторым входом узла определения электромеханической постоянной времени, а выход блока умножения соединен со вторым блоком нелинейности, выход которого является выходом узла определения электромеханической постоянной времени.
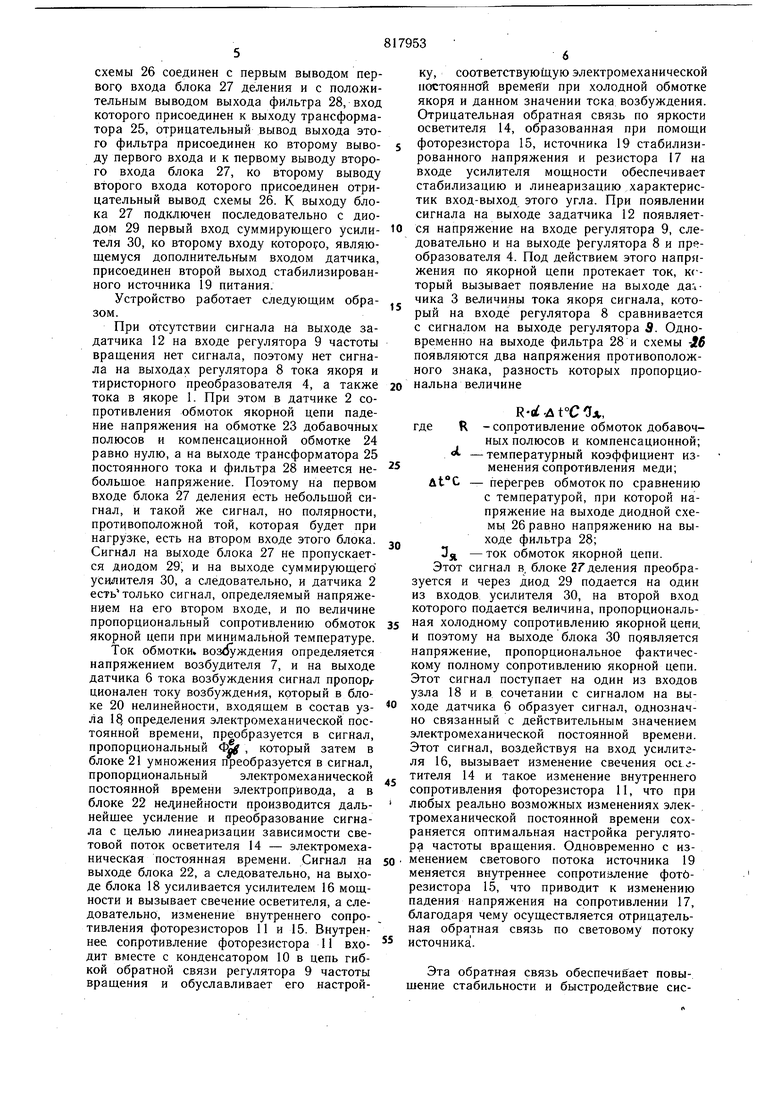
На фиг. 1 изображена функциональная схема электропривода; на фиг. 2 - схема узла опред,еления электромеханической постоянной времени; на фиг. 3- схема датчика величины сопротивления якорной цепи.
Цепь якоря f электродвигателя содержит датчик 2 величины сопротивления обмоток якорной цепи; датчик 3 величины тока якоря и тиристорный преобразователь 4. Обмотка 5 возбуждения электродвигателя
0 подключена последовательно со входом датчика 6 тока возбуждения к выходу тиристорного возбудителя 7. Ко входу тиристорного преобразователя 4 подключен выход регулятора 8 тока якоря, к первому входу которого подключен выход датчика 3, а ко
второму входу присоединены выход регулятора 9 частоты вращения и один из выводов конденсатора 10, ко второму выводу которого присоединен первый вывод фоторезистора 11, второй вывод которого присоединен к первому входу регулятора 9. Ко второму входу регулятора 9 присоединен выход задатчика 12, а к третьему входу присоединен выход датчика 13 частоты вращения.
В одном корпусе с фоторезистором 11
5 расположены быстродействующий осветитель 14, например малоинерционная лампа накаливания, и второй фоторезистор 15. Осветитель 14 присоединен к выходу усилителя 16 мощности, вход которого присоединен
0 последовательно с резистором 17 к выходу узла 18 определения электромеханической постоянной времени, к первому входу которого присоединен выход датчика 6 токавозбуждения, а ко второму входу присоединен выход датчика 2 сопротивления обмоток якорной цепи. Параллельно резистору 17 подключена цепь, состоящая из фоторезистора 15 и первого выхода источника 19 стабилизированного напряжения, второй выход которого присоединен к одному из выходов датчика 2.
Узел 18 определения электромеханической постоянной времени (фиг. 2) содержит блок 20 нелинейности, блок 21 умножения и блок 22 нелинейности, причем блок 20 включен последовательно с первым входом
5 блока 21, а вход блока 20 является первым входом узла 18. Вторым входом узла 18 является второй вход блока 21 умножения, а выходом узла 18 является выход блока 22 нелинейности, вход которого присоединен к выходу блока 21.
0 Датчик 2 величины сопротивления якорной цепи (фиг. 3) содержит последовательно включенные обмотку 23 добавочных полюсов, компенсационную обмотку 24 и трансформатор 25 постоянного тока. Диодная мостовая схема 26 входом переменного тока присоединена к общей точке якоря 1 и обмотки 23, а вторым присоединена к общей точке обмотки 24 и входа трансформатора 25 постоянного тока. Положительный вывод
схемы 26 соединен с первым выводом первого входа блока 27 деления и с положительным выводом выхода фильтра 28, вход которого присоединен к выходу трансформатора 25, отрицательный вывод выхода этого фильтра присоединен ко второму выводу первого входа и к первому выводу второго входа блока 27, ко второму выводу второго входа которого присоединен отрицательный вывод схемы 26. К выходу блока 27 подключен последовательно с диодом 29 первый вход суммирующего усилителя 30, ко второму входу которого, являющемуся дополнительным входом датчика, присоединен второй выход стабилизированного источника 19 питания.
Устройство работает следующим образом.
При отсутствии сигнала на выходе задатчика 12 на входе регулятора 9 частоты вращения нет сигнала, поэтому нет сигнала на выходах регулятора 8 тока якоря и тиристорного преобразователя 4, а также тока в якоре 1. При этом в датчике 2 сопротивления обмоток якорной цепи падение напряжения на обмотке 23 добавочных полюсов и компенсационной обмотке 24 равно нулю, а на выходе трансформатора 25 постоянного тока и фильтра 28 имеется небольшое напряжение. Поэтому на первом входе блока 27 деления есть небольщой сигнал, и такой же сигнал, но полярности, противоположной той, которая будет при нагруз-ке, есть на втором входе этого блока. Сигнал на выходе блока 27 не пропускается диодом 29; и на выходе суммирующего усилителя 30, а следовательно, и датчика 2 естьтолько сигнал, определяемый напряжением на его втором входе, и по величине пропорциональный сопротивлению обмоток якорной цепи при минимальной температуре.
Ток обмотки. воз $уждения определяется напряжением возбудителя 7, и на выходе датчика 6 тока возбуждения сигнал пропор ционален току возбуждения, который в блоке 20 нелинейности, входящем в состав узла 18, определения электромеханической постоянной времени, преобразуется в сигнал.
пропорциональный , который затем в блоке 21 умножения преобразуется в сигнал, пропорциональный электромеханической постоянной времени электропривода, а в блоке 22 нединейности производится дальнейщее усиление и преобразование сигнала с целью линеаризации зависимости световой поток осветителя 14 - электромеханическая постоянная времени. Сигнал на выходе блока 22, а следовательно, на выходе блока 18 усиливается усилителем 16 мощности и вызывает свечение осветителя, а следовательно, изменение внутреннего сопротивления фоторезисторов 11 и 15. Внутреннее сопротивление фоторезистора 11 входит вместе с конденсатором 10 в цепь гибкой обратной связи регулятора 9 частоты вращения и обуславливает его настройку, соответствую1цую электромеханической постоянной времейи при холодной обмотке якоря и данном значении тока возбуждения. Отрицательная обратная связь по яркости осветителя 14, образованная при помощи
5 фоторезистора 15, источника 19 стабилизированного напряжения и резистора 17 на входе усилителя мощности обеспечивает стабилизацию и линеаризацию характеристик вход-выход этого угла. При появлении сигнала на выходе задатчика 12 появляется напряжение на входе регулятора 9, следовательно и на выходе регулятора 8 и преобразователя 4. Под действием этого напряжения по якорной цепи протекает ток, ксторый вызывает появление на выходе да чика 3 величины тока якоря сигнала, который на входе регулятора 8 сравнивается с сигналом на выходе регулятора Э. Одновременно на выходе фильтра 28 и схемы -i6 появляются два напряжения противоположного знака, разность которых пропорцио0 нальна величине
R-e.,
где R -сопротивление обмоток добавочных полюсов и компенсационной; « - температурный коэффициент из5менениясопротивления меди;
AfC -перегрев обмоток по сравнению с температурой, при которой напряжение на выходе диодной схемы 26 равно напряжению на выходе фильтра 28; Зд - ток обмоток якорной цепи. Этот сигнал в, блоке 2Гделения преобразуется и через диод 29 подается на один из входов усилителя 30, на второй вход которого подается величина, пропорциональ5 ная холодному сопротивлению якорной цепи. и поэтому на выходе блока 30 появляется напряжение, пропорциональное фактическому полному сопротивлению якорной цепи. Этот сигнал поступает на один из входов узла 18 и в сочетании с сигналом на вы0 ходе датчика 6 образует сигнал, однозначно связанный с действительным значением электромеханической постоянной времени. Этот сигнал, воздействуя на вход усилитгля 16, вызывает изменение свечения oci ;тителя 14 и такое изменение внутреннего сопротивления фоторезистора 11, что при любых реально возможных изменениях электромеханической постоянной времени сохраняется оптимальная настройка регулятора частоты вращения. Одновременно с изменением светового потока источника 19 меняется внутреннее сопротивление фотйрезистора 15, что приводит к изменению падения напряжения на сопротивлении 17, благодаря чему осуществляется отрицательная обратная связь по световому потоку источника.
Эта обратная связь обеспечив ает повыщение стабильности и быстродействие сиетемы регулирования, а также дополнительную ее линеаризацию, что. в свою очередь, обеспечивает оптимальную обработку сигнала, образованного на входе регулятора 9 как разность выходных напряжений задатчика 12 и датчика 13. Таким образом, обеспечивается астатическое регулирование частоты вращения со стабилизацией формы переходных, процессов электропривода постоянного тока, что в сочетании с относительно простой схемой позволяет расширить диапазон регулирования и увеличить надежность привода. Формула изобретения Электропривод постоянного тока, содержащий регулятор частоты вращения с подключенными к его входу задатчиком и датчиком частоты вращения и конденсатором в цепи обратной связи, регулятор тока якоря с присоединенным к его входу датчиком тока якоря в цепи управления .преобразователем, питающим якорную цепь двигателя, и датчик тока возбуждения, отличающийся тем, что, с целью повыщения надежности и расщирения диапазона регулирования, в него введены датчик величины сопротивле-. ния якорной цепи, источник стабилизированного напряжения, узел определения электромеханической постоянной времени электропривода, усилитель мощности, резистор и расположенные в одном корпусе осветитель и два фоторезистора, при этом один из фоторезисторов включен последовательно с конденсатором в цепь обратной связи регулятора, осветитель подключен к 53 выходу усилителя мощности, вход которого последовательно с резистором подключен к выходу узла определения электромеханической постоянной времени, параллельно резистору включена цепь из второго фоторезистора и источника стабилизированного напряжения, входы узла определения электромеханической постоянной времени соединены с датчиками тока возбуждения и величины сопротивления якорной цепи, входы второго из которых включены в якорную цепь двигателя и к выходу источника стабилизированного напряжения. 2. Электропривод по п. 1, отличающийся тем, что узел определения электромеханической постоянной времени содержит два блока нелинейности и блок умножения, причем вход первого блока нелинейности является первым входом узла определения электромеханической постоянной времени, выход первого блока нелинейности присое динен к первому входу блока умножени второй вход блока умножения является вторым входом узла определения электромеханической постоянной времени, а выход блока умножения соединен со вторым блЪком нелинейности, выход которого является выходом узла определения электромеханической постоянной времени. Источники информации, принятые во внимание при экспертизе 1. «Siemens Zeitschrift, 1968. Bd 42 9, S. 765-768. 2 Авторское свидетельство СССР по завке № 2403410, кл. Н 02 Р 506, 1977.
