но соединенными преобразователем, питающим якорь двигателя, регуляторами тока и частоты вращения, содержащий установленные на валах двигателя и механизма два тахогенератора, подключенные через блок суммировання ко входу регулятора тока, что обеспечивает демпфирование высокочастотных колебаний электропривода 3. В этом электроприводе не учитывается величина момента нагрузки н не обеспечивается его ограничение, а эффективность демпфирования колебаиий умеиьшается с уменьшением нх частоты, причем происходит затягивание переходных процессов, что уменьшает быстродействие электропривода.
Наиболее близким к изобретению но технической сущности и достигаемому результату является реверсивный тиристорный электропривод для тяжелых условий работы с упругой передачей от двигателя к механизму, содержащий датчик и регулятор частоты вращения двигателя, подключенные к выходу последнего, контур регулирования возбуждения двигателя с регулятором возбуждения, питающим обмотку возбуждеиия двигателя реверсивным преобразователем и датчиком магнитного потока, а также контур регулирования тока якоря с датчиком тока, носледовательио включенными блоком выделения модуля, регулятором тока и питающим якорь двигателя нереверсивным преобразователем 4.
Применение этого электропривода иозволяет обеспечить высокий коэффициент мощности тиристорного электропривода, повысить его надежность, сократить габариты и стоимость. Однако уменьшение колебательности электропривода и ограничение вызываемых ею нагрузок здесь осуществляется за счет уменьшения скорости изменения магннтного нотока, что уменьшает быстродействие электропривода, а демпфирующие свойства при действии возмущений уменьшаются.
Цель изобретеиия - повышение быстродействия и эффективности демпфирования колебаний и ограничения иагрузок.
Это достигается тем, что в электропривод введены блок определения величнны и скорости изменения момента в упругой передаче, линейный суммирующий усилитель с двумя входами, операционный усилитель с нелинейными резисторами на двух его входах и дополнительный регулятор с параметрами, соответствующими параметрам регулятора частоты вращения, причем управляющий вход блока регулируемого ограничения подключен к выходу операционного усилителя, два входных нелннейных резистора которого соединены с выходом линейного суммирующего усилителя и с характеризующим скорость измеиения момента в упругой передаче выходом блока определення величины и скорости изменения этого момента, второй 1зыход которого, характеризующий величииу момента, подключен ко входу линейного суммирующего усилителя вместе с выходом доиолиитель5 иого регулятора, ко входу которого подключено задающее напряжение регулятора частоты вращения и выход датчика частоты вращения двигателя. Кроме того, блок определеиия величииы и скорости изменения момента в унругой передаче может быть выполнен в виде двух устаиовлсииых на валу уиругой передачи дифференциальных магнитоупругих преобразователей, вход иитання одного из которых подключен
15 к источнику неременного напряжения высокой частоты и выход - к выпрямителю, а вход питаиия второго соединеи с источником, постоянного тока, блок определепия величины и скорости может быть выполнен
20 в виде последовательно соедииеиных блока перемножения, первого и второго интегрирующих усилителей и масштабного усилителя, причем нервый иитегрирующий усилитель и три последовательно соединенных
25 усилителя охвачены жесткими обратными связями, а к двум входам блока перемиожения и входу первого интегрирующего усилителя нодключены соответственно выход датчика магнитного потока, выход датчика тока и источиик сигна;1а, пропорциона:гьного моменту сопротивления механизма, блок определения величины и скорости может быть выполнен в виде пропорционального и интегрирующего операциои5 ных усилителей с двумя входами ;i датчика частоты вращения механизма, выход которого соединен с иервыми входами указанных усилителей, вторые входы которых иодключеиы к выходу датчика частоты вра0 щения двигателя.
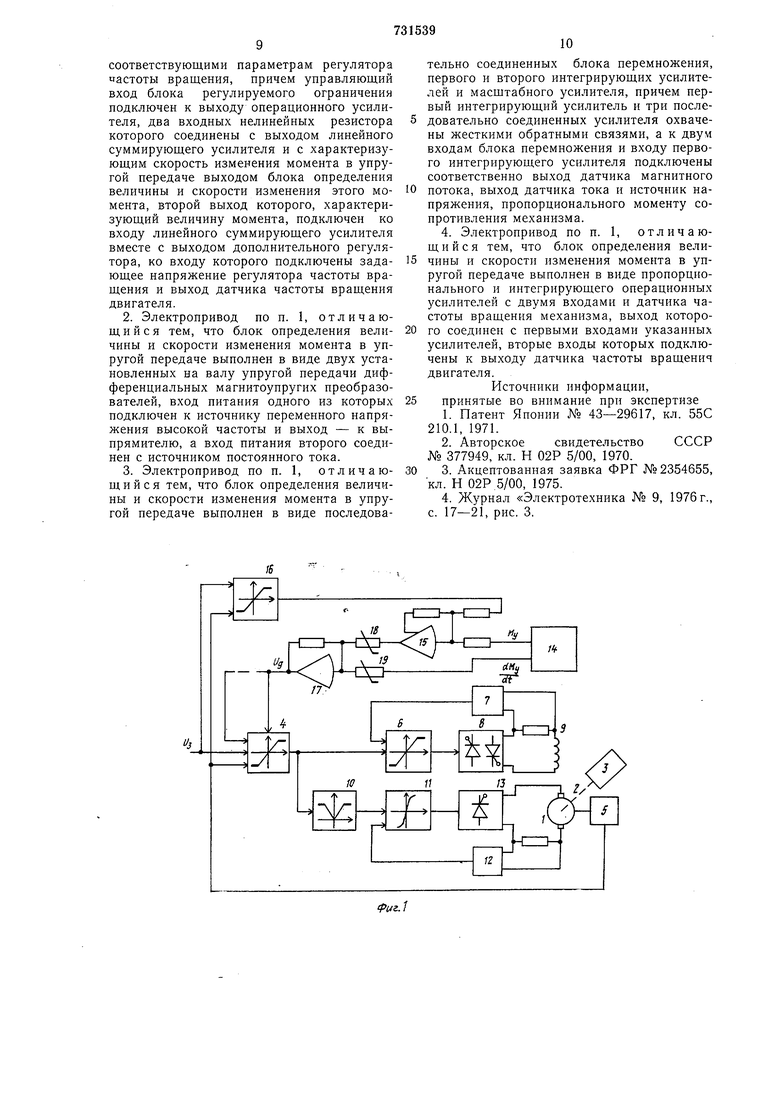
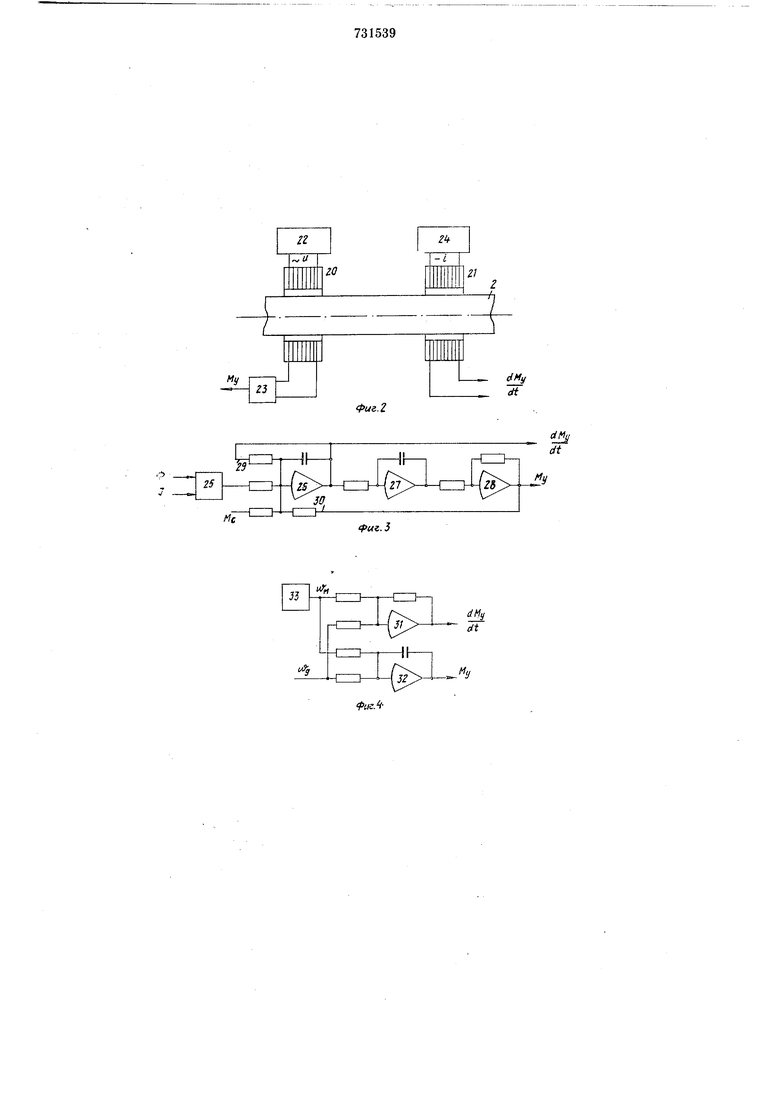
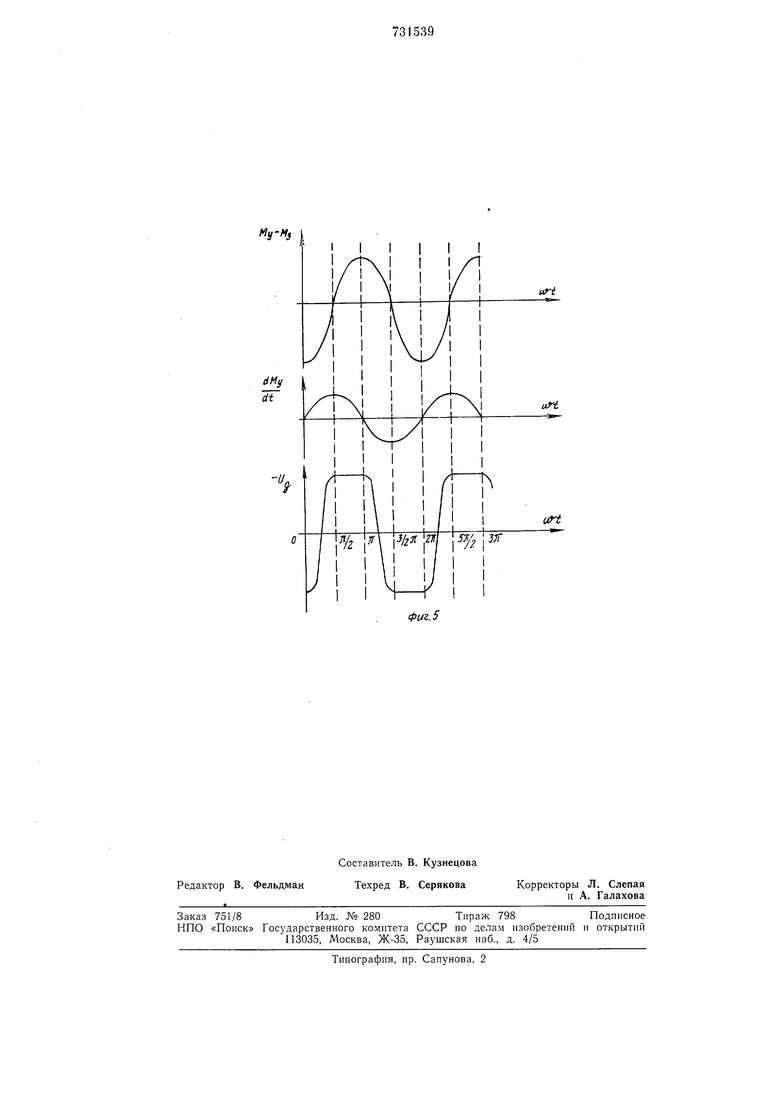
На фиг. 1 приведена схема нредлагаемого электронривода; иа фиг. 2, 3 и 4 - вариаиты выполнения блока определения ве5 лнчины и скорости изменения момеита в упругой связи; на фиг. 5 - диаграммы, поясняющие работу электропривода.
Электропривод содержит двигатель 1 и соединительный с ним уиругой передачей
0 2 механизм 3. Ко входу регулятора 4 частоты вращения иодключеио задающее напряжение и выход датчика 5 частоты вращсння двигателя. К выходу регулятора 4 частоты вращения иодключен контур регулирования возбуждения двигателя 1, содержащий последовательно соедииеииые регулятор 6 возбуждения с иодключеииым к его входу датчиком 7 магиитного иотока и peiiCpcMiHibUj преобразователь 8, питающий
0 обмотку 9 возбуждсиия двигателя 1. К выходу регулятора 4 частоты вращеиия подключей также контур регулирования тока якоря, содержащий блок 10 выделеиия модуля, регзлятор тока 11 с подключенным
к его входу датчиком 12 тока и нереверспвный преобразователь питающий якорь двигателя 1. В электропривод ДОПОЛППТеЛЬНО ВВСДе ; блок 14 определения величипы и скорости изменения момента в упругой передаче, линейный суммирующий усилитель 15 с двумя входами, дополнительный регулятор 16 с параметрами, соответствуюп.и1мн параметрам регулятхора 4 частоты вран1еиия, н операционный усилитель 17 с нелинейными резисторами 18 и 19 в цепях двух его входов. Регулятор 4 выполнен с регулируемым ограничением его выходного напряжения, ко входу нзменения которого и управлятоН1,ему входу регулятора 4 подключен выхо,, онерапнонного уснлителя 17, два входных нелинейных резиетора 18 и 19 которого соединены с выходом линейного суммирующего усилителя 15 и с характериз пощим скорость изменення момента в уиругой связи выходом блока 14 н скорости изменения этого момента, второй выход которого, характернзующпй велнчнпу момента соедннеи со входом линейного суммирующего усилителя 15 вместе с выходом дополнительного регулятора 16, ко входу которого подключено задаюн|ее ианряженне регулятора 4 н выход датчика 5. Первый варнант выиолнення блока 14 определения величины и скорости изменения момента в упругой передаче (см. фиг. 2) включает установленные на валу унругой передачи 2 первый 0 и второй 21 дифференциальные магнитоупругие преобразователи, вход питания первого из которых иодключен к источнику 22 переменного напряжения высокой частотч, его выход подключен к выпрямителю 23, а вход питания второго магнитоупругого преобразователя 21 подключен к источнику 24 постоянного тока. Второй варнант выполнення блока 14 (см. фиг. 3) включает последовательно соединенные блок 25 перемножения, первый 26и второй 27 интегрирующие уси.лителл1 и масштабный зсилптедь 28, причем первый интегрирующий усилитель 26 н три последовательно включенных уеилптеля 26, 27и 8 охвачены жесткими обратными связями 29 и 30, а к двум входам блока 25 н входу первого интегрирующего усилителя 26 иодключены соответственно выход датчика магнитиого потока, выход датчика тока и источиик сигнала, пропорционального моменту сопротивления механизма. Третий вариант выполнення блока 14 (см. фиг. 4) включает пропорциональный 31 и интегрирующий 32 операционные усилители с двумя входами и датчик 33 частоты вращения механизма, выход которого соединен с первыми входами указанных усилителей, вторые входы которых иодключены к выходу датчика 5. Электронрнвод рабстает следующим образом. Так как контур регулирования возбуждения и контур регулирования тока якоря, обладающий свойствами источника тока, подчинены контуру регулировання частоты вращения, то обеспечпвается ненрерывное унравление нрнводом, причем в качестве главного канала управления частотой вращения двигателя нспользуется его цепь возбуждення. Выхол.ное напряжение линейного суммирующего усилителя 15 оиределяется разностью фактического значення момента fe упругой передаче My н его заданного значения /Из, определяемого в соответствии с вынолияемым режимом управлення выхолом дополнительного регулятора 16. Это напряжение вместе с выходом блока 14, характсрнзующнм скоростью изменения момента в упругой передаче, через нелннейные резиеторы 18 и 19 с квадратичттой характеристикой поступает на вход операидюнного усилителя 17, формирующего демпфирующий сигнал д - - (у - M.Y Sign (Жу - Жз) + 1 d.M,Д-,где cii - собственная частота колебаний; К. Кп - коэфЛинненты нропорциональНа фиг. 5 приведен график изменения этого сигнала при гармонических колебаниях момента в упругой передаче относительно его заданного значення и K K. В 2 интервалах (, л) н (-я, 2л), когда знаки отклонен1 я р.елнчины момента от заданного зиачення п скоростн его нзменения одтнакоры (наиболее неблагоприятный с точки опения отклонения момента от заданного значения режим), величина этого сигнала остается raкcнмaльнoй н нропорцнональна, как следует из (1), квадрат величины колебаний, а знак этого сигна,ла противоиоставлен знаку отклонения момента и скорости его изменения, благодаря чему обеспечивается максимальная эффективность действия демпфирующего сигнала. В ннтервалах (О, -) (л, - гт) црн разных зипках М-., протпвоположпых направлентгях изменення их модулей, нронсхолит изменение велттчнны н знака этого сигнала, представляющего собой в целом негар тоннческлю кусочно-гладкую периодическую ФУНКЦИЮ. Фаза этого сигнала опережает фазу колебаний момента на велтппну . причем это опереженне по фазе можно варьнровать изменением соотнотиентш между коэ Ьфнцнентамн К и KiДемпфирующий снгнад с выхода операциоигюго усилителя 17 поступает па вход измепения напряжения ограничеппя регулятора 4 и на его управляющий вход, причем первое пз указанных воздействий ограничение момента и демпфирование колебаний электропривода при насыщенном регуляторе 4, а второе - в зопе устаповпвшегося режима, когда регулятор частоты вращения выходит пз насыщения.
Первый вариант выполнеиия блока 14 определения величины и скорости изменения момента и упругой иередачс (см. фиг. 2) иозволяет получить на выходе первого магнитоуиругого преобразователя 20, питаемого от источника 22 неремеииого напряжения высокой частоты, выпрямлеппый с помощью выпрямителя 23 сигнал, пропорциональный величине момента, а на выходе второго магнитоуиругого иреобразователя 21, питаемого от источника 24 постояииого тока, сигнал, пропорциональный скорости его изменения, без использовання дпфференцпрующих устройств.
Второй вариант выполнения этого блока (см. фиг. 3) позволяет определить величину и скорость изменения момента решением уравнения
()
j Л
rfMv
/С,р
4
dt
+-i
,/,
М,
(2) Л.
где Ф,/и ток якоря
- магнитный поток двигателя;С,
-жесткость и коэффициент трения З ругой передачи; , /м - момеиты инерции двигателя и
механизма;
MO - момент сопротивления механизма.
Такое вынолнение блока 14 целесообразно использовать при контролпруемом или пренебрелчимо малом моменте сопротивления механизма (например, в электроприводах для горизонтального перемещения грузов с гибким подвесом).
В третьем варианте выполнения блока 14 (см. фиг. 4) пропорциоиальный 31 и интегрирующий 32 оиерацпоииые усилители определяют скорость изменения и величину момента в упругой передаче на основе пнформации о частотах вращения двигателя о)д и механизма Шм, получаемой с датчиков 5 и 33, связанных с определяемыми величинами зависимостями
С(а)д-а)„)
(3)
С|(Шд-Ш„).
(4)
Его целесообразно применять в электроприводах, допускающих установку датчика
частоты вращения на механизме (например, в электроприводах испытательных стендов, манипуляторов).
Все три варнанта блока определения величины и скорости изменения момента в упругой иередаче исключают иеобходимость иримеиения диффереицирующих элементов, реальное выиолиение которых всегда вносит дополннтельную инерциоииость
и погрещиость в управление. Это позволяет повысить точность управления и эффективность ограничения и демпфирования колебаний нагрузок электропривода.
Осупдествляемое в предложеииом электроприводе управление с учетом как, величины, так и скорости изменения момента в упругой связи, обеспечение опережения по фазе демпфирующего сигнала и возможность его изменения, формирование кусочногладкого характера изменения этого сигнала с поддержанием его иа максимальном уровне в наиболее тяжелые с точки зрения отклоиения момента от заданного значения интервалы движения и регулированием этого уровня ироиорцпонально квадрату величины колебаний, а также использование для определения величины и скорости изменения момента в упругой передаче узлов, на требующих выполнения операции дифференцирования, реальное выполнение которой вносит дополнительные погрещности в управлепие - все это позволяет повысить эффективпость ограничения нагрузок и демпфироваиия колебаний, а вместе с тем
иовысить быстродействие электроиривода без опасиости существенного иовыщения этнх нагрузок.
Формула изобретения
1. Реверсивный тиристорный электропривод с упругой передачей от двигателя к механизму, содержащий датчик и регулятор частоты вращения двигателя с блоком регулируемого ограничения в цепи его обратной связи, подключенные к выходу указанного регулятора, контур регулипования возбуждения двигателя с регулятором возбуждения, питаюп 1им обмотку возбуждения двигателя ревсрсивиым преобразователем и датчиком магнитного потока, а также контур регулироваппя тока якоря с датчиком тока, последовательно включенным блоком выделепия модуля, регулятором тока и питающим якорь двигателя нереверсивным преобразователем, отличающийся тем, что, с целью повыщения быстродействия ц эффективности демнфироваиия колебаний и ограничения нагрузок, в него введены
блок определения величины и скорости измепения момента в упругой передаче, линейный суммирующий усилитель с двумя входами, операционный усилитель с нелинейными резисторами на двух его входах и
дополнительный регулятор с параметрами,
соответствующими параметрам регулятора частоты вращения, причем управляющий вход блока регулируемого ограничения подключен к выходу операционного усилителя, два входных нелинейных резистора которого соединены с выходом линейного суммирующего усилителя и с характеризующим скорость изменения момента в упругой передаче выходом блока определения величины и скорости изменения этого момента, второй выход которого, характеризующий величину момента, подключен ко входу линейного суммирующего усилителя вместе с выходом дополнительного регулятора, ко входу которого подключены задающее напряжение регулятора частоты вращения и выход датчика частоты вращения двигателя.
2.Электропривод по п. 1, отличающийся тем, что блок определения величины и скорости изменения момента в упругой передаче выполнен в виде двух установленных на валу упругой передачи дифференциальных магнитоупругих преобразователей, вход питания одного из которых подключен к источнику переменного напряжения высокой частоты и выход - к выпрямителю, а вход питания второго соединен с источником постоянного тока.
3.Электропривод по п. 1, отличающийся тем, что блок определения величины и скорости изменения момента в упругой передаче выполнен в виде последовательно соединенных блока перемножения, первого и второго интегрирующих усилителей и масщтабного усилителя, причем первый интегрирующий усилитель и три последовательно соединенных усилителя охвачены жесткими обратными связями, а к двум входам блока перемножения и входу первого интегрирующего усилителя подключены соответственно выход датчика магнитного потока, выход датчика тока и источник напряжения, пропорционального моменту сопротивления механизма.
4. Электропривод по п. 1, отличающийся тем, что блок определения величины и скорости изменения момента в упругой передаче выполнен в виде пропорционального и интегрирующего операционных усилителей с двумя входами и датчика частоты вращения механизма, выход которого соединен с первыми входами указанных усилителей, вторые входы которых подключены к выходу датчика частоты вращения двигателя.
Источники информации,
принятые во внимание при экспертизе
1.Патент Японии № 43-29617, кл. 55С 210.1, 1971.
2.Авторское свидетельство СССР № 377949, кл. Н 02Р 5/00, 1970.
3.Акцептованная заявка ФРГ №2354655, кл. Н 02Р 5/00, 1975.
4.Журнал «Электротехника № 9, 1976г., с. 17-21, рис. 3,
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования частоты вращения электропривода постоянного тока | 1977 |
|
SU731538A1 |
| Устройство для управления редукторным электроприводом | 1972 |
|
SU585583A1 |
| Устройство для двухзонного регулирования скорости многодвигательного электропривода | 1980 |
|
SU875570A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
| Электропривод постоянного тока | 1980 |
|
SU1023600A1 |
| Многодвигательный электропривод | 1985 |
|
SU1410264A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С УПРУГИМИ СВЯЗЯМИ | 2012 |
|
RU2513871C1 |
| ЭЛЕКТРОПРИВОД ПРОКАТНОГО СТАНА | 2013 |
|
RU2523032C1 |
| Устройство для демпфирования колебаний в электроприводе с упругой связью между двигателем и механизмом | 1986 |
|
SU1319218A2 |
| Электропривод | 1986 |
|
SU1390756A2 |
13
Г
My
dHy dt
uf-i
Фиг.5
