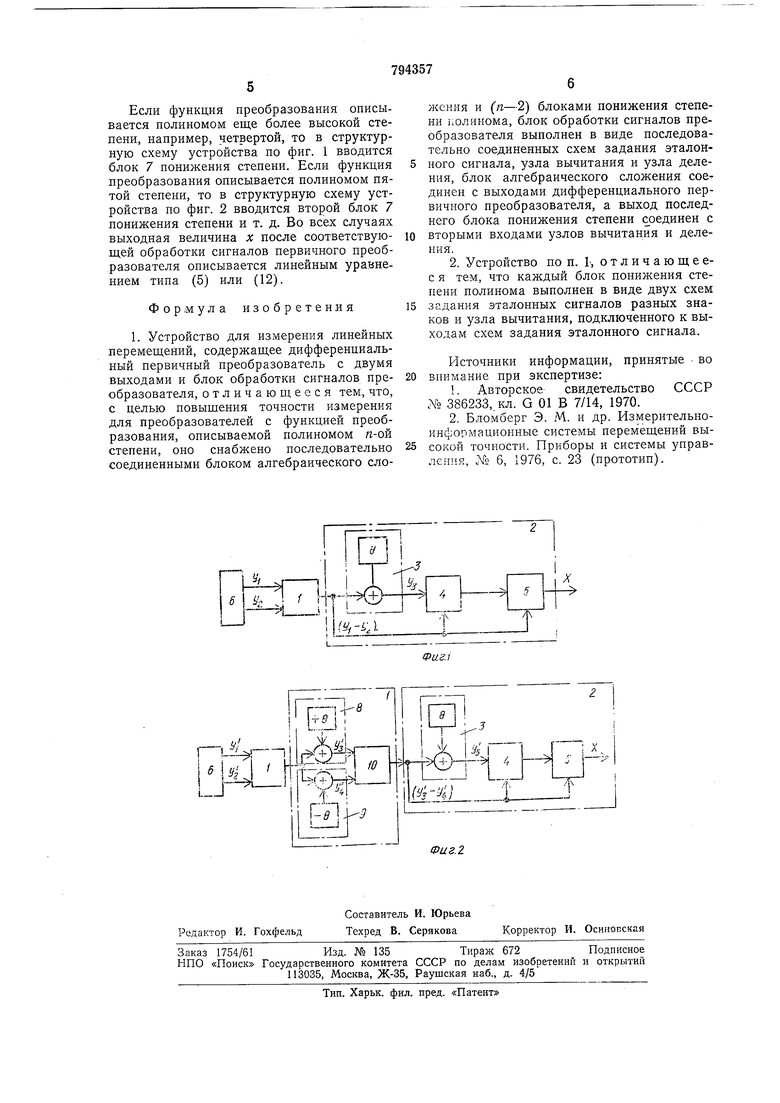
Устройство по фиг. 1 содержит блок / алгебраического слолсения и блок 2 обработки сигиалов преобразователя, в состав которого входит схема 3 задаиия эталонного сигнала, узел 4 вычитания и узел 5 деления. Выход блока / алгебраического сложения соединен со вторыми входами узлов 4, 5 вычитания и деления и входом схемы 3 задания эталонного сигнала. Выход схемы 3 соединен с первым входом узла 4 вычитания, выход которого соединен с иервым входом узла 5 деления, который является выхол.ом устройства.
Ко входам блока 1 алгебраического сложения подключены выходы дифференциального первичного преобразователя 6.
Устройство по фиг. 2 содержит включенный между блоком / алгебраического сложения и блоком 2 обработки сигналов нреобразовятеля блок 7 понижения степени полинома. Этот блок содержит две схемы 8 и 9 задания эталонных сигналов разных зна1--ов и узел 10 вычитания.
Устройство на фиг. 1 работает следующим образом.
На вход блока / алгебраического сложения с выхода дифференциального преобразователя 6 поетупают два сигнала t/i и У2, описываемые полиномом четной степени, например, второго порядка
+ + azx
У2 ао + а(-х)+а2(-ху, (1)
где X - измеряемая величина, UQ, ai, а - коэффициенты функции преобразования, зависящие от изменения температуры окружающей среды, старения элементов схемы и т. д., т. е. нестабильно. Сигнал на выходе блока / алгебраического сложения будет соответствовать выражению
(2)
2aiA.
В схеме 3 задания эталонного сигнала в сигнал, онисываемый уравнением (2), вводится стабильная постоянная составляющая 9, которая по своей физической сущности соответствует измеряемому параметру X, в данном случае - перемещеиию, 3 результате зтого на выходе ехемы 3 получаем сигнал УЗ:
y, 2ai(x+@).(3)
На выходе блока 4 вычитания получим сигнал равный
Уз-(У1-У2) 2а1@.(4)
Сигналы, описываемые выражениями (2) и (4), поступают на вход узла 5 деления, на выходе которого получим вычлсленное значение измеряемого параметра х(yi-yz) в
5)
X t/3-(i/i-У2)
Как видно из выражения (5), на точность измерения х уже не оказывают влияния нестабильные коэффициенты а, а., а функции преобразования.
Описываемое устройство по фиг. 2 работает следующим образом.
На вход блока / алгебраического сложения с выхода дифференциального преобразователя постзтают два сигналя yl и
//2, описываемые полиномом нечетной степснп, например, третьего порядка
-f- aiX + fi2-v2 + a,.x /2 ao + ai(x)i-a2(-x)2 + a:,(x). (6)
В этом случае сигнал на выходе алгебраического блока 1 будет описываться выражением:
yi + y2 2ao + 2a2X.(7)
Этот сигнал поступает на входы схем 8 к 9, на выходе которых получают сигналы г/з и У4, соответственно:
//з 2ао + 2а2(х + @)
y 2ao + 2a2(x-Q).(8)
I :осле вычитаиия этих сигналов в узле 10 вычитания
yz-y SaoSx
(9)
с;;гн л, о:п1сьгоаемый уравнением (9), поступчст в схему 3 блока обработки снгна.юв. Е схеме 3 задания эталонного сигнала блока к исходному измеряемому паР г:/т1)у X добавляется стабильная иостоялн - составляющая 0, которая, по своей г1л13 ; с1:ой природе соответствует параметгу X. В результате этого на выходе схемы
о получаем сигиал у syb ahQ(x + Q}.
(10)
(игпал на выходе узла 4.вычитания блока 2 обработки сигналов описывается выражением:
/5-(уз-/4)8а2в2.
(11)
По отнощению сигналов, поступающих в узгл 5 блока 2 обработки сигналов, определяется вычисленное значение измеряемого параметра х в виде
(12)
X
У:,--(У ,-У,
В выражение (12), которое по своему виду идентично (5), не вошли нестабильные коэффициенты UQ ... аз, следовательно, они не оказывают влияния на точность измерения параметра х с помощью преобразователя, функция преобразования которого описывается полиномом третьей степени.
Если функция преобразования описывается полиномом еще более высокой степени, например, четвертой, то в структурную схему устройства по фиг. 1 вводится блок 7 понижения степени. Если функция преобразования описывается полиномом пятой степени, то в структурную схему устройства по фиг. 2 вводится второй блок 7 понижения степени и т. д. Во всех случаях выходная величина х после соответствующей обработки сигналов первичного преобразователя описывается линейным уравнением типа (5) или (12).
Формула изобретения
1. Устройство для измерения линейных перемещений, содержащее дифференциальный первичный преобразователь с двумя выходами и блок обработки сигналов преобразователя, отличающееся тем, что, с целью повышения точности измерения для преобразователей с функцией преобразования, описываемой полиномом п-ой степени, оно снабжено последовательно соединенными блоком алгебраического сложения и (п-2) блоками понижения степени иолинома, блок обработки сигналов преобразователя выполнен в виде последовательно соединенных схем задания эталонного сигнала, узла вычитания и узла деления, блок алгебраического сложения соединен с выходами дифференциального первичного преобразователя, а выход последнего блока понижения степени соединен с
вторыми входами узлов вычитания и деления.
2. Устройство по п. 1, отличающеес я тем, что каждый блок понижения степени полинома выполнен в виде двух схем
задания эталонных сигналов разных знаков и узла вычитания, подключенного к выходам схем задания эталонного сигнала.
Источники информации, принятые во внимание при экспертизе:
1.Авторское свидетельство СССР 386233, кл. G 01 В 7/14, 1970.
2.Бломберг Э. М. и др. Измерительноинфоомационные системы перемещений высокой точности. Приборы и системы управления, 6, 1976, с. 23 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Измеритель линейных перемещений | 1978 |
|
SU699317A1 |
| Система управления вибростендом | 1984 |
|
SU1275396A1 |
| Устройство для измерения перемещений | 1991 |
|
SU1798616A1 |
| Устройство для автоматизированной поверки измерительных приборов | 1982 |
|
SU1051478A2 |
| Измерительный функциональный преобразователь | 1981 |
|
SU984042A1 |
| СПОСОБ КОДИРОВАНИЯ ЧИСЕЛ | 1970 |
|
SU272666A1 |
| СПОСОБ АНАЛИЗА НЕСТАЦИОНАРНОГО ПРОЦЕССА | 1998 |
|
RU2159956C2 |
| Число-импульсный функциональный преобразователь | 1981 |
|
SU1005041A1 |
| Генератор функций | 1984 |
|
SU1241219A1 |
| Преобразователь перемещения в код | 1985 |
|
SU1277395A2 |
ь11
