Изобретение относится к измерительной технике и может быть использовано для измерения перемещений и деформаций объектов, подверженных температурным и упругим деформациям.
Цель из.обретения - повышение точности измерения за счет устранения погреш- ности от аддитивной помехи в измерительных каналах устройства.
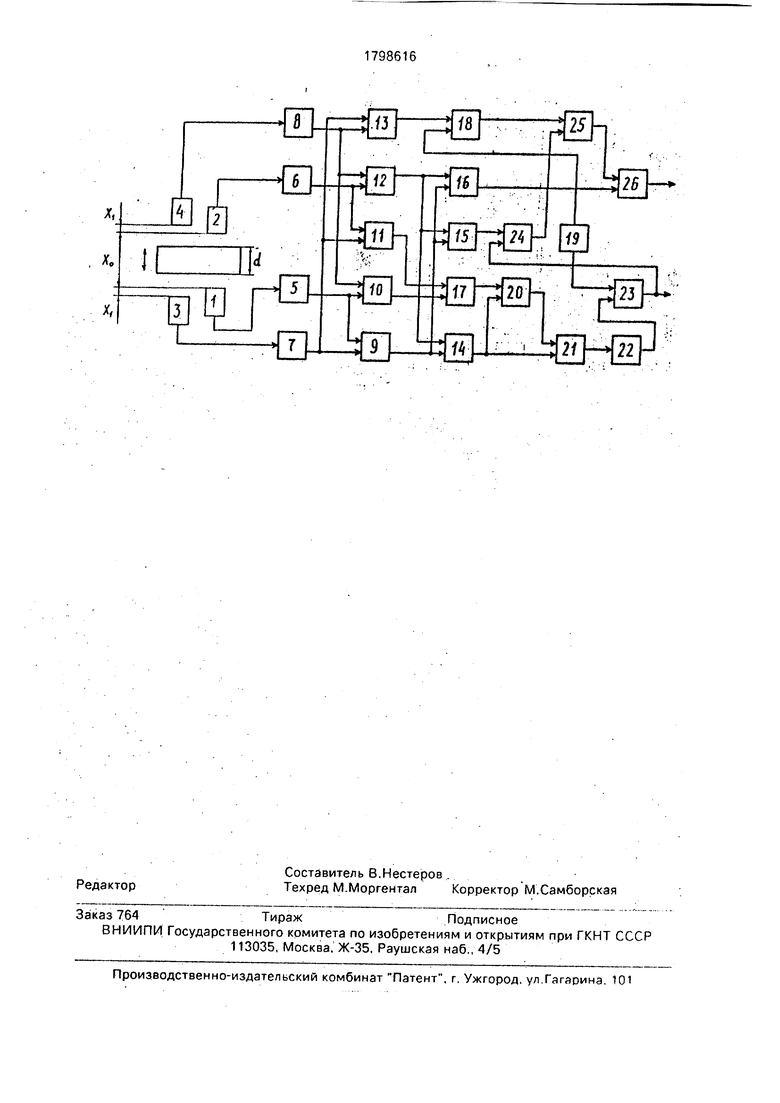
На чертеже приведена блок-схема устройства для измерения перемещений.
Устройство содержит четыре идентичных датчика 1-4 перемещения, подключенных соответственно к измерительным преобразователям 5-8. Выход первого измерительного преобразователя 5 подключен к суммирующим входам первого и второго блоков 9, 10 вычитания. Выход второго измерительного преобразователя б подключен к суммирующим входам третьего и четвертого блоков 11. 12 вычитания. Выход третьего измерительного лреобразова- теля 7 подключен к вычитающим входам первого, третьего и пятого блоков 9, 11, 13 вычитания. Выход четвертого измерительного преобразователя 8 подключен к вычитающим входам второго и четвертого блоков 10, 12 вычитания и суммирующему входу пятого блока 13 вычитания. Выход первого блока 9 вычитания подключен к одному из входов первого блока 14 умножения, одному из входов первого бло.ка 15 сложения и вычитающему входу шестого блока 16 вычитания. Выход второго блока 10 вычитания подключен к одному из входов второго блока 17 умножения, ко второму входу которого подключен выход третьего блока 11 вычитания. Выход четвертого блока 12 вычитания подключен ко второму входу первого блока
14 умножения, второму входу первого блока
15 сложения и суммирующему входу шестого блока 16 вычитания. Выход пятого блока
vj ю
00 ON
О
13 вычитания подключен к одному из входов третьего блока 18 умножения, ко второму входу которого подключен выход блока 19 памяти. Выход первого блока 14 умножения подключен к суммирующему входу седьмого блока 20 вычитания и одному из входов первого блока 21 деления, а к вычитающему входу седьмого б«ока,20 вычитания подключен выход второго бвока 17 умножения. Выход седьмого блока 20 вычитания подключен ко второму входу первого блока 21 деления, выход которого подключен ко входу блока 22 извлечения квадратного корня. Выход блока 22 извлечения квадратного корня подключен к одному из входов четвертого блока 23 умножения, ко второму входу которого подключен выход блока 19 памяти. Выход блока 23 умножения является одним из выходов устройства и подключен к одному из входов пятого блока 24 умножения, ко второму входу которого подключен выход первого блока 15 сложения. Выходы третьего и пятого блоков 18, 25 умножения подключены ко входам второго блока 25 сложения, выход которого и выход; шестого блока 16 вычитания подключены ко входам второго блока 26 деления, выход которого является вторым выходом устройства. .
Устройство работает следующим образом.
При перемещении контролируемого объекта сигналы на выходах измерительных преобразователей 5-8 определяются соответственно выражениями
Xi - взаимное смещение первого 1 и третьего 3, второго 2 и четвертого 4 датчиков перемещения относительно друг друга ;
Д X-. перемещение контролируемого объекта относительно начального положения;
г} - аддитивная помеха в измерительных каналах. :
Сигналы с выходов первого 5 и третьего 7 измерительных преобразователей.поступают на входы первого блока 9 вычитания, на выходе которого появляется сигнал
У1 уз FTSX + a+Xv+Ax Т
kX-i (а + ДХ)(а +Xi + ДХ);
(5)
Сигналы с выходов первого 5 и четвертого8 измерительных преобразователей поступают на входы второго блока 10
вычитания, на выходе которого появляется
сигнал. -- ..
yi-y Vx+ -;a4-XV + AX
k(Xi-2AX) . fi (а+ДхУ(э -fXr-ЛхУ Л(э
Сигналы с выходов второго 6 и третьего 7 измерительных, преобразователей поступают на входы третьего блока 11 вычитания, на выходе которого появляется сигнал
У2-уз
а 4-ДХ
+ /а 4- Xi + ДX
П
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления вибростендом | 1984 |
|
SU1275396A1 |
| Информационно-измерительная система для определения компонент перемещений и деформаций объекта | 1990 |
|
SU1783283A1 |
| Информационно-измерительная система для определения компонент перемещений и деформаций объекта | 1989 |
|
SU1693361A1 |
| Преобразователь целых комплексных чисел в двоичный код | 1980 |
|
SU962914A1 |
| Устройство для измерениялиНЕйНыХ пЕРЕМЕщЕНий | 1978 |
|
SU794357A1 |
| Вычислительное устройство | 1984 |
|
SU1280611A1 |
| Цифровой нерекурсивный фильтр | 1985 |
|
SU1270876A1 |
| Устройство для измерения радиального отклонения прецессирующего вала | 1989 |
|
SU1663396A1 |
| Четырехразрядный преобразователь двоично-десятичного кода в двоичный | 1984 |
|
SU1181153A1 |
| ИНФОРМАЦИОННО-ИЗМЕРИТЕЛЬНАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ КОМПОНЕНТОВ ПЕРЕМЕЩЕНИЙ И ДЕФОРМАЦИЙ ОБЪЕКТА | 1993 |
|
RU2089847C1 |
Изобретение относится к измерительной технике и может быть использовано для измерения перемещений и деформаций объектов, подверженных температурным и упругим деформациям. Целью изобретения является повышение точности измерения за счет устранения погрешности от аддитивной помехи в измерительных каналах устройства. Устройство для измерения переме- щений содержит четыре идентичных датчика перемещения, установленных дифференциально-симметрично, так, что два из них, первый и второй, включены дифференциально, третий, установленный дифференциально второму, смещен относительно первого на известное расстояние XL четвертый, установленный дифференциально третьему, смещен относительно второго на то же расстояние Xi, что и третий относительно первого, но в противоположном направлении, четыре измерительных преобразователя, два блока сложения, семь блоков вычитания, пять блоков умножения, два блока деления и блок извлечения квадратного корня. 1 ил. СП С
У2 гтах-
k
+ Ч
a +Xi + ДХ + Г7
уз a +Xi + ДХ k
У4
где k- коэффициент пропорциональности, зависящий от влияющих факторов, который вследствие идентичности датчиков 1-4 и измерительных преобразователей 5-8 для всех измерительных каналов меняется одинаково;
/ /
2 , 55 где Хр- расстояние между первым т и ио
вторым 2 датчиками перемещения;
d - толщина контролируемого объекта;
40
. .
45
50
k(Xi -2 ДХ) (а.- Д Х)(г 4-Xi ДХ) . {)
Сигналы с выходов второго 6 и четвертого 8 измерительных преобразователей поступают на входы четвертого блока 12 вычитания, на выходе которого появляется сигнал
У2-у4 ГТт +
(8)
kXi (а - ЖхТСа- Х -АХ)
Сигналы (5) и (8) поступают на входы первого блока 14 умножения, сигнал на выходе которого равен.
(У1-УЗ)(У2-У1)
1 ДХ2((а + X, )2 - ДХ2
(9)
Сигналы (6) и (7) поступают на входы который поступает на один из входов пятого второго блока 17 умножения, сигнал на вы- блока 24 умножения, на второй вход которо- ходе которого равен го поступает сигнал (14) с четвертого блока
23 умножения. В результате, сигнал на вы(У1-у4)(У2-уз)5 ходе пятого блока 24 умножения равен
.k2 X2-4AX2 , m , Х1 У1-УЗ)+(У2-У4).
a2-AX2(a+Xi)2-AX2 1 J 2
i (.У1 - УЗ ) ( У2 - У4 ) - ( У1 - У4 ) ( У2 - УЗ) Ю ------V у.. - у- Л ( уо - V4 )
Сигналы (9) и (10) поступают на входыv .
седьмого блока 20 вычитания, на выходе2 А 2 А
которого появляется сигнал- 2kXi(a + aXi+AX.)AX ,,„,.
а2-ДХ2(а+ХГ)2-АХ2 l J
(У1-узХУ2-У4НУ1-У4ХУ2-уз)15 Сигнал с выходов четвертого 8 и треть 4 к2 АX2 ,его 7 измерительных преобразователей -АХ21Га + Xi Y2 - АХ2 1ступают на входы пятого блока 13
.вычитания, сигнал на выходе которого стаЭтот сигнал, а также сигнал (9) с выхода новится равным блока 14 поступают на входы первого блока 20
21 деления, сигнал на выходе которого ра- а +Хч + Ах вен
(У1 -УЗ)(У2 У4) -(У1 -У4)(У2 - Уз) - (1) (У1-УЗ)(У2-УО 25 (
-ду2Этот сигнал, а также сигнал Xi с выхода
;-я- (12)блока 19 памяти поступают на входы треть 1 .его блока 18 умножения, сигнал с выхода
Сигнал(12) поступает в блок 22 извлече-30 которого
ния квадратного корня, с выхода которого2kXiAX
(y4-y3h(a+X02-AX2 П8)
(У1 - Уз К У2 - У4 ) - ( У1 - У4 }( У2 - уз)поступает на один из входов блока 25 V уА / V у/1) -- 35жения- .а Другой вход которого поступает
УУАУ у /сигнал (16) с выхода пятого блока 24 умно„ дхжения..В результате, на выходе блока 25
. (13)сигнал равен
поступает на один из входов блока 23 умно-х,г Г у, - у3) + С уа - У4) 1 жения, на второй вход которого поступает 40 - --l-J-i.
Xi- сигнал -j- с блока 19 памяти. В результате, г---------------- ---:----
на выходе блока 23 умножения получаем х| ( у1 уз ) (.У2 X (у у ) ( У2 уз) сигнал. . У1 У4;
Xi 45 2kXrAX + Xi
ДХ Т a2-AX2 t(a+Xi)2-AX2J- ()
.. - .,Сигналы (8) и (5) с выходов четвертого 12
llCV УЗ.) ( У2 -У4 ) ( У1 У4 ) ( У2 уз)и первого 9 блоков вычитания поступают на V yj уА у2 у4 л 50 входы шестого блока 16 вычитания, сигнал
на выходе которого равен
.(14) (уа-У1НУ1-Уз) - . . . Сигналы (5) и (8) поступают на входы
первого блока 15сложения, на выходе кото-2k Xi AX 2 а + Xi Q рого появляется сигнал 55 а2 - АХ2 (a+Xi )2 - Ах2
Этот сигнал, а также сигнал (19) с выхо(у1-узЖу2-у4)да блока 25 поступают на вход второго бло- 2 k Xi (a2 -f a Xi -f AX2 ) nt., ка26деления, на выходе которого получают
а2-АХ2(а+Х,)2-АХ2 1 ( }
1
а- Х1(У4-УЗ) + Х1 У1-УЗ)
.|Е
У1 УЗ)(У2 -У4) -(у1..-У4)(у2 -УЗ) -----(У1-УЗДУ2-У 1 -----(21) (У2 -У4)-(У1 -У2) . .
Величина Xi - постоянная для данного устройства, обеспечивается достаточно легко вследствие небольшого ее значения.
. Величина ДХ в соответствие с выражением (14) определяет перемещение контролируемого объекта относительно начального положения и не содержит погрешности от изменения под действием влияющих факторов коэффициентов К, нестабильности параметра а и аддитивной помехи т/ в измерительных каналах устройства. . . .. . . .....
Величина аГравная (X0-d)/2 и получаемая на выходе второго блока 25 деления, при постоянстве расстояния Х0 между датчиками 1 и 2 характеризует толщину контро- лируемого.объекта, которая может меняться из-за упругих и тепловых деформаций, а также в результате механической обработки.
Применение данного изобретения повышает точность измерения перемещений и деформаций объектов за счет устранения аддитивных помех в измерительных каналах.. -..
Ф о р м у л а и з о б р ет е н и я Устройство для измерения перемещений, содержащее три идентичных датчика перемещения, установленных дифференциально несимметрично так, что два из них, первый и второй, включены дифференциально, а третий, установленный дифференциально второму, смещен относительно первого на известное расстояние Xi, три измерительных преобразователя, каждый из которых соединен с соответствующим датчиком перемещения, блок сложения, два блока вычитания, два блока умножения, два блока деления и блок памяти, о т л и ч а ю-щ е- ё с я тем, что, с целью повышения точности, в него дополнительно введены четвертый, идентичный первым трем, датчик перемещения, установленный дифференциально первому и третьему и смещенный относительно второго на расстояние Xi, но в противоположном направлении, четвертый измерительный преобразователь, второй блох сложения, пять блоков вычитания, три блока умножения и блок извлечения квадратного корня, выход первого измерительного преобразователя подключен к
.|Е
У1 -(У
суммирующим входам первого и второго блоков вычитания, вы-ход второго измерительного преобразователя подключен к суммирующим входам третьего и четвертого
блоков вычитания, выход третьего измерительного преобразователя третьего датчика подключен к вычитающим входам первого, третьего и пятого блоков вычитания, выход четвертого измерительного преобразователя Четвертого датчика подключен к вычитающим входам второго и четвертого блоков вычитания и суммирующему входу пятого: блока вычитания, выход первого блока вычитания подключен к одному из входов пёр;вого блока умножения, одному из входов первого .блока сложения и вычитающему входу шестого блока вычитания, выход второго блока вычитания подключен к одному з входов второго блока умножения, к второму входу которого подключен выход
третьего блока вычитания, выход четвертого
блока вычитания подключен к.второму вхо-:
. ду первого блока умножения, второму входу
первого блока сложения и суммирующему
входу шестого блока вычитания, выход пятого блока вычитания подключен к одному из входов третьего блока умножения, к второму входу которого подключен выход блока памяти, выход первого блока умножения
подключен к суммирующему входу седьмого блока вычитания и одному из входов первого блока деления, а к вычитающему входу седьмого блока вычитания подключен выход второго блока умножения, выход седьмого блока вычитания подключен к второму входу первого блока деления, выход которого подключен к входу блока извлечения квадратного корня, выход которого подключен к одному из входов четвертого блока
умножения, к второму входу которого, подключен выход блока памяти, выход четвертого блока умножения является одним из выходов устройства и подключён к одному из входов пятого блока умножения, к второму входу которого подключен выход первого блока сложения, выходы третьего и пятого блоков умножения подключены к входам второго блока сложения, выход которого и выход шестого блока вычитания подключены
к входам второго блока деления, выход которого является вторым выходом устройства.
| Устройство для измерения радиального отклонения прецессирующего вала | 1989 |
|
SU1663396A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
