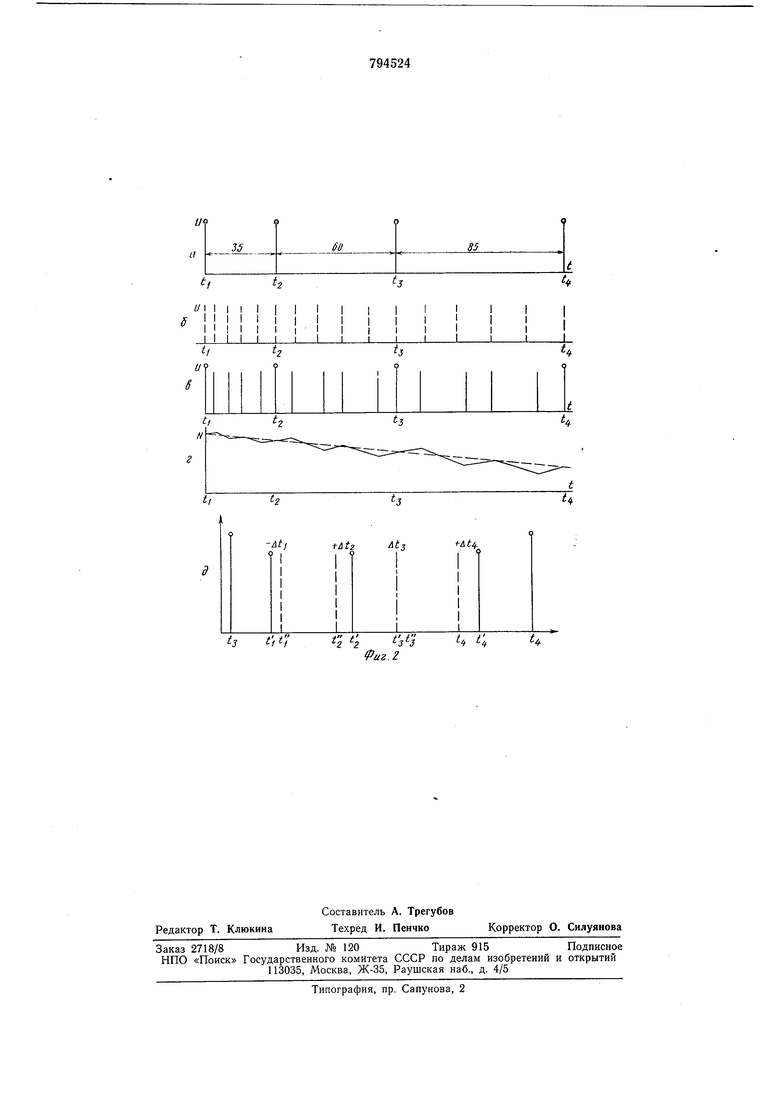
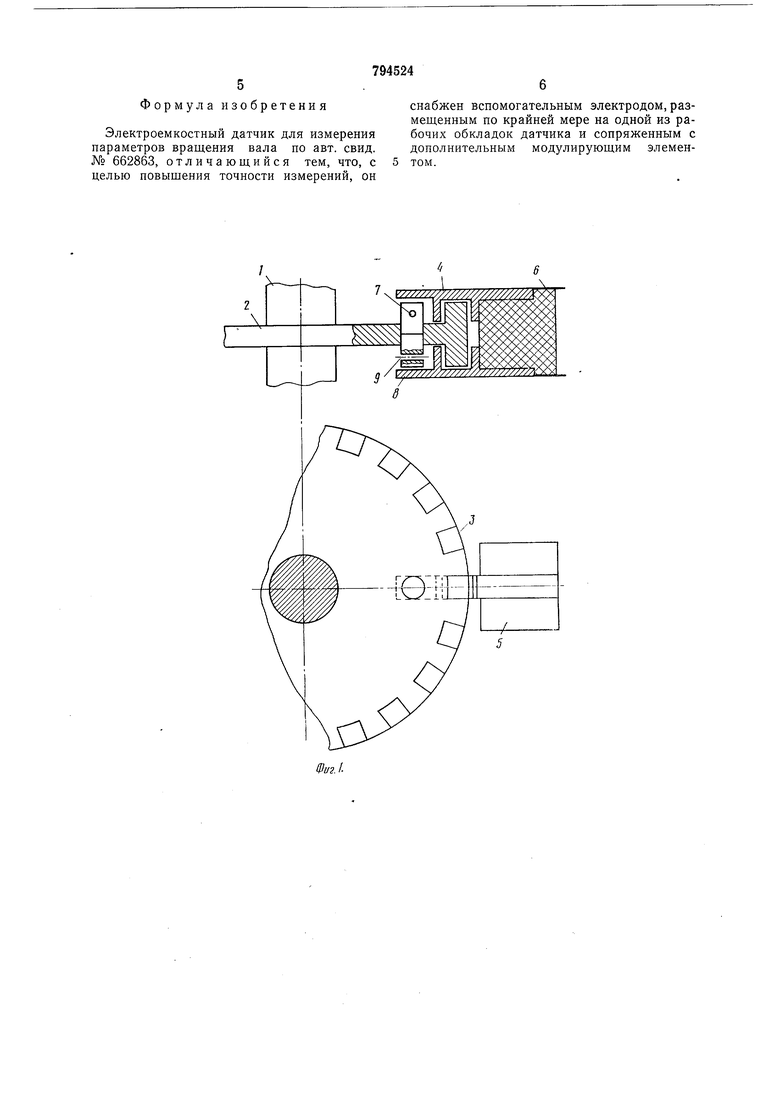
цнонной прокладки 5 и снабженными выводами 6 для подключения к вторичной аппаратуре, реагирующей на изменение емкости датчика. Кроме системы основных модулирующих электродов 3, распололсенных по периферии оснон аиия 2, датчик снабжен вспомогательным съемным электродом 7, выполненным для надежности и удобства монтажа составным и сопряженным с дополнительными электродами 8 рабочих обкладок 4, а также размещенным симметрично относительно плоскости, ироходящей через ось датчика и рабочих обкладок 4. Отверстия 9 служат для ввода рычажного ключа при монтаже. При равномерно уменьщающейся скорости вращения вала вторичная аппаратура выделяет моменты достижения датчиком экстремального, например максимального, значения его емкости, представляет результаты измерений в виде последовательности импульсов, время между которыми равномерно увеличивается в соответствии с порядком их поступления. При этом временная диаграмма а (см. фиг. 2) работы датчика, полученная с помощью аппаратуры, выделяющей моменты достижения датчиком максимальной емкости, определяет закономерность изменения скорости вала при торможении, в данном случае равномерно затухающей. Поскольку скорость вала гидроагрегата равномерно затухает, то время между импульсами равномерно увеличивается за каждый оборот на заданную величину. Для участка кривой выбега скорости, где выполняется условие - Мп-1 - &fn+i - , где Д - прирост времени между импульсами, с наибольшей точностью вычисляется коэффициент затухания скорости за один оборот и по нему строится распределение на временной оси импульсов, соответствующих прохождению остальных не снабженных вспомогательными электродами модулирующих электродов через полость рабочих обкладок. Распределение импульсов в этом случае, рассчитанное по коэффициенту затухания, полученному по результатам измерений, изображенным на диаграмме а, приведено на диаграмме б (см. фиг. 2) примепительно к испытанию датчика, не имеющего метрологических дефектов, причем здесь рассмотрен случай пятиэлементной модулирующей системы. Если же в процессе изготовления или эксплуатации датчика условие идентичности геометрических параметров его модулирующих элементов не было выполнено, закон распределения выходных импульсов будет носить случайный характер и не будет соответствовать закону распределения импульсов, полученному при помощи сдвоенного модулирующего электрода 7. Пример распределения выходных импульсов в данном случае изображен на диаграмме в (см. фиг. 2), а на диаграмме г отлажено истинное (пунктирная прямая) и измеренное (сплошная линия) изменение скорости гидроагрегата в рассмотренном случае. Наиболее удобно для оценки метрологических параметров датчика нспользовать разностные величины между реально полученными временными промежутками времени, разделяющими импульсы, выдаваемые вторичной аппаратурой, и расчетными периодами времени, определяемыми в соответствии с выщеупоминавщейся закономерностью, для чего целесообразно использовать совмещенную диаграмму, на которой наносятся обе последовательности импульсов - расчетная и реально полученная. Участок такой совмещенной временной диаграммы д (см. фиг. 2) отображает временное распределение импульсов, полученное в результате эксперимента между моментами 3 и t, между которыми вал соверщил полный оборот, причем импульсы, полученные при помощи сдвоенных элементов 7 выделены по высоте, остальные импульсы изображены сплошными линиями, а импульсы, соответствующие работе метрологически соверщенного датчика и полученные расчетным путем, изображены щтриховыми линиями. Анализ этой диаграммы показывает, что модулирующий элемент, соответствующий моменту tl, расположен по угловому расстоянию от реперного модулирующего элемента (сопряженного с элементом 7) на угол, меньший номинального, элемент, соответствующий моменту времени tz, - на угол, больщий номинального, элемент, соответствующий моменту Гз, выделенный щтрих-пунктирной линией, не имеет метрологических дефектов и, наконец, элемент, соответствующий моменту t, так же, как и элемент, соответствующий моменту t2, смещен на угол, меньщий номинального. Тогда относительная погрешность в результатах измерений, получаемых при помощи каждого из модулирующих элементов, может быть вычислена из выражения где (ц- „-истинный период вращения - tn-разница между истинным периодом и измеренным с учетом знака. Таким образом, результаты расчета и кспериментально получаемые результаты змерений позволяют произвести метролоическую оценку выполнения датчика, а акже выявить изменение его метрологичеких параметров в ппопеогр эксплуатации.
Формула изобретения
Электроемкостный датчик для измерения параметров вращения вала по авт. свид. № 662863, отличающийся тем, что, с целью повыщения точности измерений, он
снабжен вспомогательным электродом, размещенным по крайней мере на одной из рабочих обкладок датчика и сопряженным с дополнительным модулирующим элементом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения вращающего момента | 1977 |
|
SU647561A1 |
| Способ измерения параметров вращения вала | 1976 |
|
SU685982A1 |
| Способ определения моментаОСТАНОВА пРЕиМущЕСТВЕННОгидРОАгРЕгАТА | 1976 |
|
SU794521A1 |
| Устройство для контроля скольжения генератора | 1973 |
|
SU450286A1 |
| Тахометрический преобразователь | 1986 |
|
SU1497580A1 |
| Способ задания режима работы гидроагрегата и устройство для его осуществления | 1985 |
|
SU1270406A1 |
| Датчик частоты вращения вала | 1981 |
|
SU1296940A1 |
| Способ измерения скорости вращения вала | 1976 |
|
SU667895A1 |
| МОРСКОЙ ЭКОЛОГО-ЭНЕРГЕТИЧЕСКИЙ КОМПЛЕКС | 2011 |
|
RU2466053C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ЗУБЧАТЫХ РЕДУКТОРОВ | 1993 |
|
RU2035714C1 |