Изобретение относится к способам контроля и диагностирования зубчатых редукторов и коробок передач автомобилей, судов, авиационной техники, станков.
Известен способ оценки технического состояния механизма с зубчатыми колесами, включающий одновременное измерение виброускорения и угла поворота [1]
Однако при реализации известного способа необходимо одновременно регистрировать углы поворота диагностируемых зубчатых колес и вибрации корпуса редуктора; точно синхронизировать сигналы с преобразователей угла поворота и вибродатчика (от этого непосредственно зависит точность гармонического анализа сигнала, идущего с вибродатчика).
Наиболее близким способом к изобретению является способ диагностирования механизмов, содержащих объекты циклического действия (в том числе зубчатые редукторы), заключающийся в том, что регистрируют излучаемый механизмом виброакустический сигнал и фиксируют его в функции от синхронных с ним значений координат цикла действия механизма за серию его циклов. Для каждого множества синфазных значений координаты цикла действия механизма вычисляют гистограмму распределения соответствующих им значений виброакустического сигнала и по характеру изменения гистограммы в функции от фазового значения координаты цикла определяют состояние механизма [2]
Однако в известном способе процесс диагностирования сложен из-за необходимости: одновременно регистрировать виброакустический сигнал и координату цикла (это может быть угол поворота или количество полных оборотов и пр.); точной синхронизации измерения сигналов с вибродатчика и датчика координаты цикла (от точности синхронизации непосредственно зависит форма гистограммы).
Кроме этого, виброакустический сигнал содержит в себе значительную нестационарную компоненту, так как вибродатчик реагирует одновременно на все проявившиеся в данный момент времени воздействия внутри редуктора и на редуктор. В связи с этим гистограмма виброакустического сигнала не имеет устойчивой формы.
Наличие ярко выраженной нестационарной компоненты в виброакустическом сигнале, усиленной погрешностью синхронизации измерения двух сигналов, не обеспечивает достоверности и точности диагноза.
Необходимо также отметить, что вибродатчик, обладая высокой чувствительностью, не имеет идеальной диаграммы направленности и реагирует на все возмущения, действующие не только в направлении основной оси чувствительности, но и по другим направлениям с соответствующими коэффициентами передачи. В связи с этим в виброакустическом сигнале присутствуют значительные маскирующие помехи, также размывающие форму гистограмм.
Задача, на решение которое направлено изобретение, заключается в повышении достоверности результатов обработки измерений диагностических параметров и упрощение процесса диагностирования.
Технический результат, который может быть получен при осуществлении изобретения, заключается в возможности построения устойчивой гистограммы распределения диагностических параметров, в которой отсутствуют нестационарная компонента и маскирующие (паразитные) составляющие диагностического сигнала.
Это достигается тем, что в способе диагностирования зубчатых редукторов, заключающемся в том, что производят серийные измерения случайной составляющей диагностического параметра, формируют однородный статистический массив указанных диагностических параметров, строят гистограмму распределения диагностических параметров и по форме гистограммы диагностируют каждую пару сопряженных зубчатых колес, а в качестве диагностического параметра измеряют случайную составляющую интервала времени между полным оборотом ведущего и ведомого сопряженных зубчатых колес.
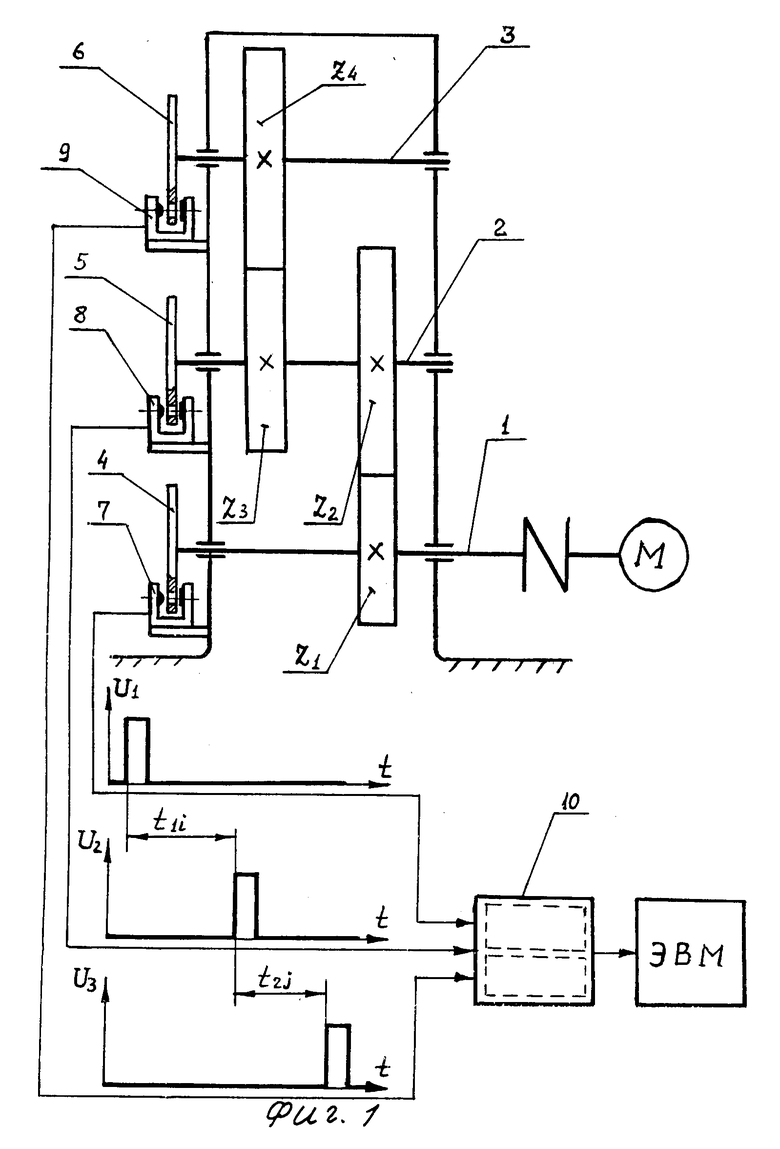
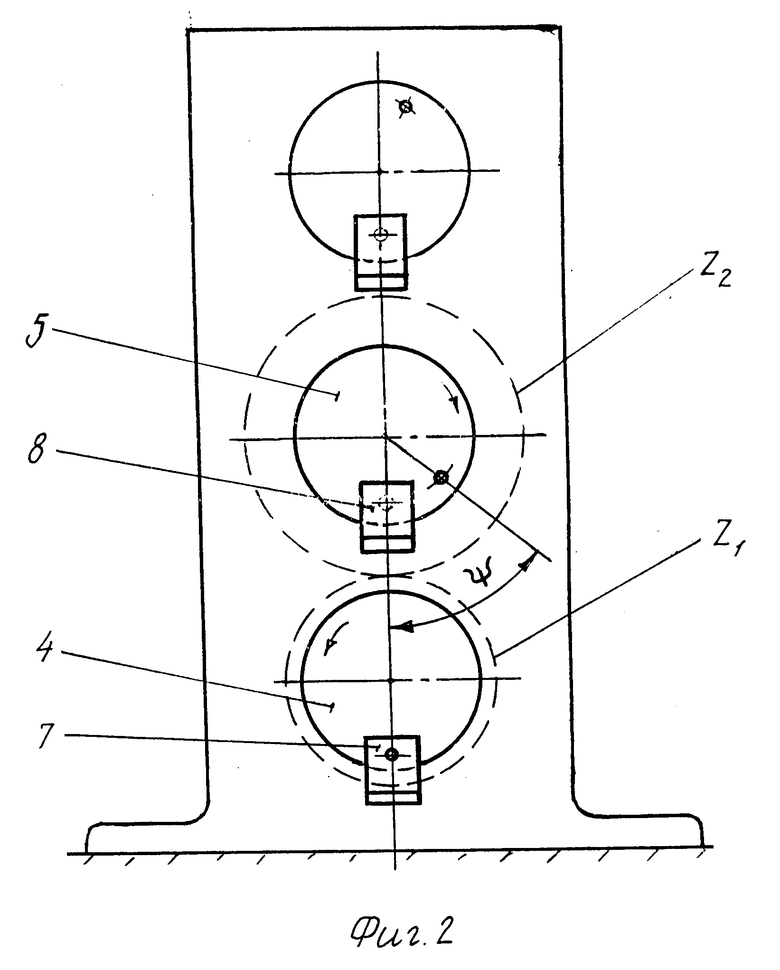
На фиг. 1 изображен диагностируемый двухступенчатый редуктор с установленными на нем тремя оптическими конечными выключателями и вторичной аппаратурой; на фиг.2 взаимное расположение двух светонепроницаемых дисков, жестко установленных на валах редуктора.
Пусть диагностированию подлежит двухступенчатый зубчатый редуктор (фиг. 1) с двумя парами сопряженных зубчатых колес: Z1, Z2 и Z3, Z4. Жестко на каждом валу 1,2,3 установлены светонепроницаемые диски 4-6 соответственно с одним отверстием в каждом для светового потока. Каждый диск входит в паз оптических конечных выключателей 7-9, работа которых состоит в формировании сигналов U1,U2,U3 ступенчатой формы в тот момент, когда отверстия во вращающихся вместе с шестернями дисках пересекают световые потоки конечных выключателей.
Сигналы с конечных выключателей 1-3 подаются на устройства 10 измерения интервалов времени, которыми могут служить стандартные частотомеры или собственный таймер персональной ЭВМ. Пусть Z1 < Z2 и Z3< Z4 (т.е. редуктор понижает скорость вращения). Одно из устройств измерения времени в блоке 10 запускается на счет времени сигналом U1 и останавливается только сигналом U2. При этом колесо 1 с диском 4 могут сделать несколько оборотов, прежде чем будет остановлен счет времени.
Интервал времени ti(1) это время между двумя последовательными импульсами U1 и U2. Одновременно сигнал U2 запускает на счет другое устройство счета времени, а поступивший от конечного выключателя 9 сигнал 3 остановит этот счет. Так будет сформирован интервал времени tj(2). Повторный запуск за счет интервала времени сигналом U1 может начаться только после остановки предшествующего счета сигналом U2.
Повторный запуск второго устройства измерения времени возможен только, если произошла остановка предшествующего счета сигналом U3.
Независимо от того, повышающим или понижающим скорость является диагностируемый редуктор, общим требованием является следующее: сигнал на запуск счета подается с более быстровращающегося вала (для пары сопряженных колес), а на остановку счета с медленно вращающегося. Например, если бы Z2 < Z1, то запуск с чета осуществлялся бы сигналом U2, а останов сигналом U1.
При многократном вращении дисков 4,5,6 вместе с зубчатыми колесами конечные выключатели вырабатывают последовательности ступенчатых сигналов, и в результате в памяти ЭВМ формируются два статистических массива значений интервалов времени: t1(1), t2(1).tn(1) и t1(2), t2(2).tn(2).
Каждый из них является исходным источником диагностической информации. При этом значения в одном и том же массиве могут существенно различаться между собой, но разбиваются на группы с близкими значениями. Число таких групп определяется числом зубьев соответствующих сопряженных зубчатых колес. Действительно, рассмотрим пару Z1 и Z2 (фиг.1). Передаточное отношение этого зацепления Z2/Z1. Если есть общие множители в Z1 и Z2, то после их сокращения получим:
Z2/Z1=  /
/
Пусть в начальный момент отверстие в диске 4 находится на оптической оси конечного выключателя 7. Поступил сигнал на начало счета. Отверстие в диске 5 смещено на какой-либо угол Ψ относительно оптической оси конечного выключателя 8. Именно величина этого смещения определяет величину Ψ времени. Сделав полный оборот, колесо Z1 и диск 4 вернутся в исходное положение, однако колесо Z2, а вместе с ним и диск 5 займут уже другое угловое положение, а следовательно, интервал времени t2(1) будет другим. Однако, если колесо Z1 сделает ровно  полных оборота, то колесо Z2 сделает ровно
полных оборота, то колесо Z2 сделает ровно  оборот и процесс начнет повторяться снова.
оборот и процесс начнет повторяться снова.
Учитывая, что каждое следующее измерение может начаться только после того, как предшествующий процесс измерения был остановлен сигналом с "медленно" вращающегося вала, в данном случае сигналом U2, заключаем, что количество групп значений ti(1) с близкими величинами совпадают с числом полных оборотов колеса Z2, т.е. число групп равно Z1. Таким образом, первый массив чисел ti(1) образует естественным образом матрицу, каждая строка которой это серия значений интервалов времени при Z1 полных оборотах колеса Z2: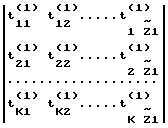 A
A
Аналогично для второго массива получим матрицу: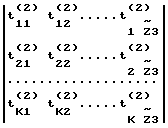
В каждом столбце матрицы стоят числа, соответствующие одному и тому же значению Ψ углового смещения отверстия в диске относительно оси конечного выключателя. Индекс К соответствует количеству серий измерений. Определив средние значения в каждом столбце  и
и  и вычитая их от величин в соответствующих столбцах (операция центрирования), получим две матрицы с однородными статистическими массивами. Величина произведения К
и вычитая их от величин в соответствующих столбцах (операция центрирования), получим две матрицы с однородными статистическими массивами. Величина произведения К  это число оборотов колеса Z2, совершенных при накоплении статистического массива. По каждому массиву строится гистограмма распределения, по форме которой распознаются дефекты соответствующего зубчатого зацепления.
это число оборотов колеса Z2, совершенных при накоплении статистического массива. По каждому массиву строится гистограмма распределения, по форме которой распознаются дефекты соответствующего зубчатого зацепления.
Операция центрирования делает независимыми случайные составляющие интервалов времени от расположения дисков 4 и 5 на валах 1 и 2. Анализу подвергаются только случайные составляющие интервалов времени.
Предварительно для каждого дефекта получают описанным способом статистические массивы и строят соответствующие гистограммы. Текущую гистограмму сравнивают с имеющимися эталонными гистограммами и таким образом определяют дефект.
Преимущества способа диагностирования состоят в следующем:
время, как физический параметр, наиболее просто измеряется и с высокой точностью, для этого существуют стандартные аттестованные частотомеры, может быть использован также собственный таймер персонального компьютера;
время, как исходный источник диагностической информации, в значительно меньшей степени подвержен случайным изменениям из-за воздействия нестационарных случайных источников возбуждения. Это связано с тем, что время формируется на некотором заданном перемещении Ψ, в процессе которого происходит осреднение по времени воздействия и взаимная нейтрализация по множеству воздействий различных нестационарных источников возмущений. Только после взаимной нейтрализации и осреднения нестационарных случайных возмущений оканчивается измерение времени t. Вибродатчик реагирует на все возмущения, проявившиеся в данный момент времени;
для диагностирования не требуются дорогостоящие датчики, сложное метрологическое обеспечение, и аналого-цифровые преобразователи, так как сигнал снимается уже в цифровой форме.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИАГНОСТИКИ СОСТОЯНИЯ ИНСТРУМЕНТА | 2006 |
|
RU2316749C1 |
| СПОСОБ ВИБРОАКУСТИЧЕСКОЙ ДИАГНОСТИКИ ПЕРЕДАЧ ЗАЦЕПЛЕНИЕМ | 2002 |
|
RU2224232C1 |
| СПОСОБ ВИБРОДИАГНОСТИКИ ПЕРЕДАЧ ЗАЦЕПЛЕНИЕМ | 2002 |
|
RU2231768C2 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ И/ИЛИ ТРАНСМИССИИ АВТОМОБИЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2165605C1 |
| Способ диагностирования механизмов станков | 1987 |
|
SU1502207A1 |
| Способ диагностирования механизмов и машин | 1986 |
|
SU1393623A1 |
| СПОСОБ ДИАГНОСТИКИ ЗУБЧАТЫХ ПЕРЕДАЧ | 2007 |
|
RU2337340C1 |
| СПОСОБ РЕГУЛИРОВКИ ГИПОИДНОЙ ПЕРЕДАЧИ | 1991 |
|
RU2010136C1 |
| СПОСОБ СБОРКИ ПРЯМОЗУБОЙ КОНИЧЕСКОЙ ПЕРЕДАЧИ | 1991 |
|
RU2012832C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ НАКОНЕЧНИКА ИЗМЕРИТЕЛЬНОЙ ГОЛОВКИ РОБОТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2009881C1 |
Изобретение относится к способам контроля и диагностирования и ориентирован на распознавание дефектов зубчатых редукторов и коробок передач автомобилей, судов и авиационной техники. Метод основан на измерении и анализе случайной составляющей интервала времени между сигналами с конечных выключателей, связанных с ведущим и ведомым сопряженными зубчатыми колесами. Метод включает построение гистограммы распределения случайной составляющей интервала времени и сравнение ее с эталонными гистограммами, построенными предварительно для каждого дефекта. 2 ил.
СПОСОБ ДИАГНОСТИРОВАНИЯ ЗУБЧАТЫХ РЕДУКТОРОВ, заключающийся в том, что для каждой пары сопряженных зубчатых колес производят серийные измерения случайной составляющей диагностического параметра, формируют однородный статистический массив диагностического параметра, строят гистограмму распределения диагностического параметра и по форме гистограммы диагностируют объект, отличающийся тем, что в качестве диагностического параметра измеряют случайную составляющую интервала времени между полным оборотом ведущего и ведомого сопряженных зубчатых колес.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ диагностики состояния механизмов, содержащих объекты циклического действия | 1976 |
|
SU731343A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
