(54) ПЛАВНИКОВЫЙ ДВИЖИТЕЛЬ ДЛЯ ЛОДОК
1 fj 8
зп0;етш
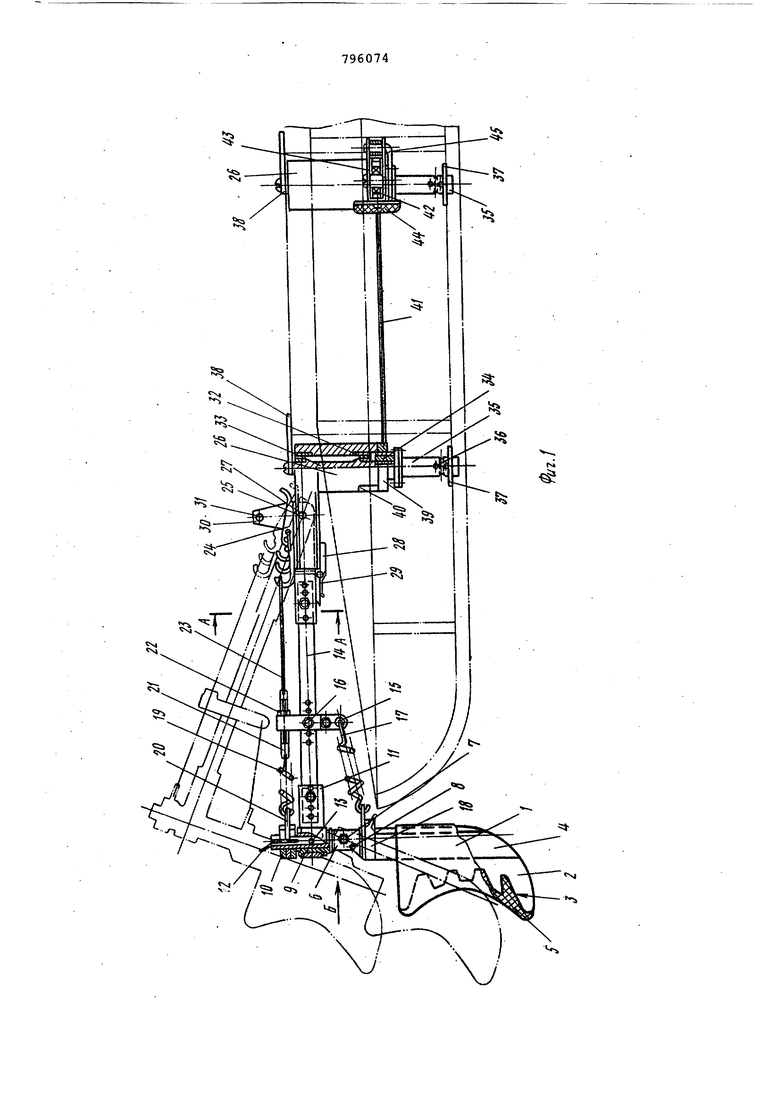
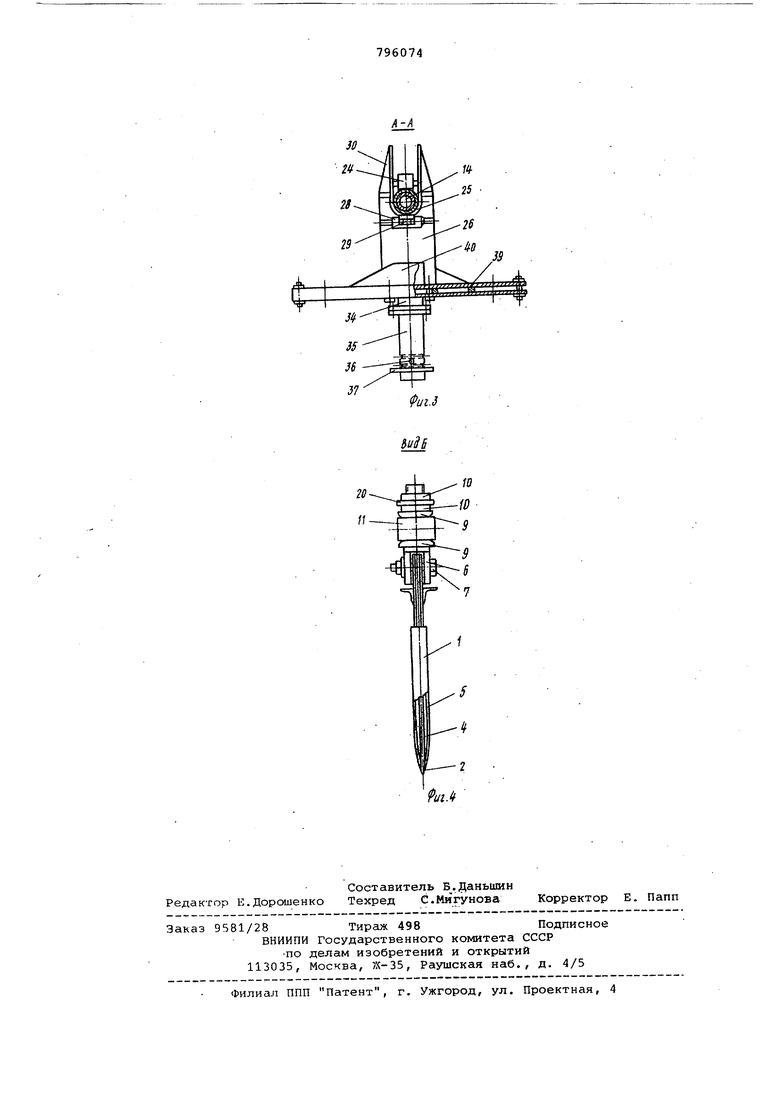
Вал б при помощи подшипников 9 и накидных гаек 10 установлен в цапфе 11. Вал б вверху имеет продольный вырез 12 для упругой фиксации гаек 10, а в средней части соосное с цапфей 11 отверстие 13 для фиксации вращения вала б относительно; цапфы 11.
Цапфа 11 закреплена на конце теле.скопического рычага 14, на котором размещен механизм изменения натяжения пружин, состоящий из муфты 15, фиксируемой на рычаге 14 в различных положениях при помощи штока 16,двух пружин, причем нижняя пружина 17 крепится с одной стороны к муфте 15, а с другой стороны к уголкам 18, подкрепляющим плавник 1 и имеющий несколько отверстий для крепления пружины. Верхняя пружина 19 с одной стороны крепится к косынке 20, установленной на валу 6 и имеющей несколько отверстий для крепления пружины, ас другой стороны к штоку 21, проходящему через направляющую в муфте 15, имеющему регулировочную упорную гайку 22 и тягу 23, которая своим другим концом крепится к замку 24, имеющему несколько фиксирующих крючков и установленно1 1у на рычаге 14, который закреплен в ложементе 25 водила 26 при помощи горизонтального штока 27 Рычаг 14 повора-чивается на штоке 27 на различный угол,Фиксируемый при помощи упора 28 с пружиной 29 и косынок 30, имеющих с рычагом 14 соосное отверстие 31.
Водило 26 установлено на подшипниках 32 на регулируемой по длине разборной стойке,,состоящей из трубы 33 ввинчиваемой во фланец 34, соединяющимся -с патрубком 35, имеющем регулировочные отверстия 36 и входяпцем в подпятник 37. Сверху к стойке крепится косынка 38. К водилу снизу крепится коробчатая горизонтальная планка 39, усиленная косынками 40 и снабжен ная по концам тягами 41, которые крепятся с другой стороны к- такой же планке, установленной на .водиле без ложемента, закрепленном на такой же разборной стойке.
На передней планке по концам установлены на подшипниках 42 коробчатые хомуты 43, к которым с одной стороны крепятся педали 44, а с другой стороны - рейка параллелограмма 45.
Движитель работает следующим образом..
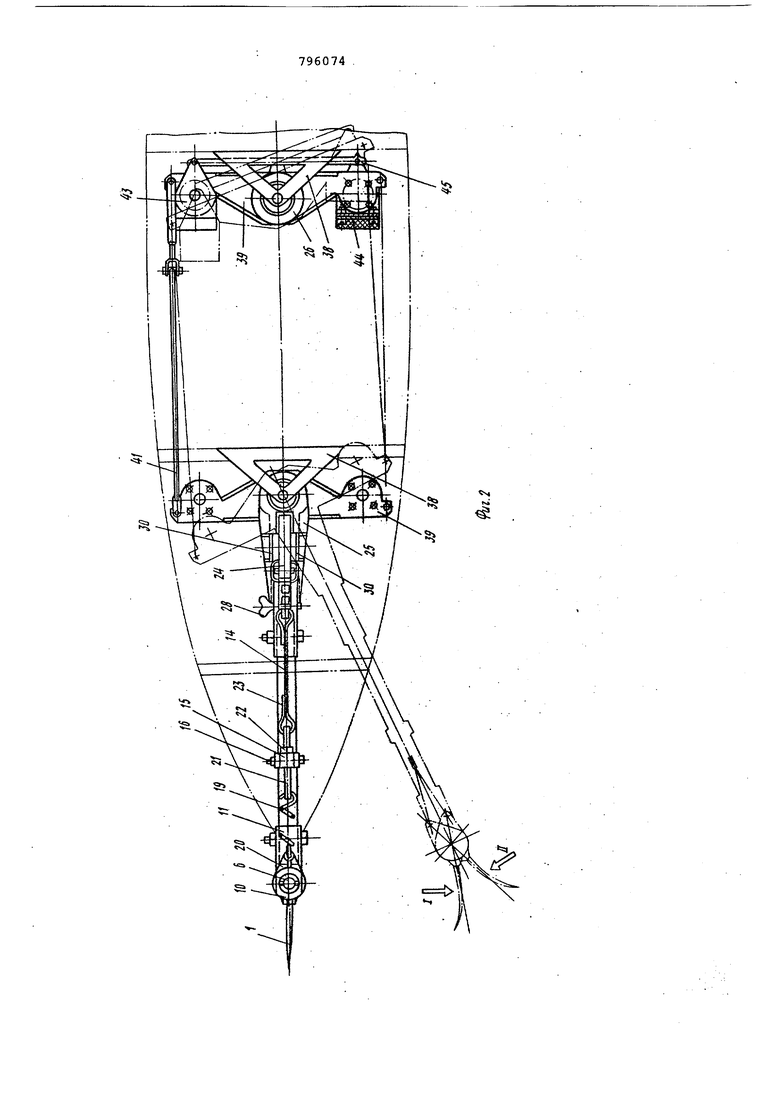
Конструкция плавника 1 обеспечивает переменную упругость вдоль его длины, что позволяет изгибаться плавнику при его движении по синусоидальной траектории так, как показано на фиг.2. Стрелками обозначено направление движения рычага. При движении плавника вправо (цифра 1) его хвостовая- часть отклоняется под действием сопротивления жидкости влево. При движении плавника в противоположную сторону (цифра 2), его хвостовая часть отклоняется вправо, автоматически увеличивая кривизну профиля.
Выполненная хвостовая часть плав« ника в форме хвоста рыб позволяет улучшить стекание с его плоскости концевых вихревых жгутов, что уменьшает вблновое и индуктивное сопротив ление плавника; а следовательно, увеQ личивает его гидродинамическое качество. Подъемная сила, возникающая на плавнике при движении по траектории , пытается развернуть плавник поперек траектории и увеличить угол атаки. Ось симметрии вала 6, к которой приложена сила, препятствующая такому развороту, находится впереди точки приложения подъемной силы, что не позволяет развернуться плавнику. В зависимости от положения плавника, 0 на траектории, меняется величина его подъемной силы, угол атаки и расстояние точки приложения подъемной силы до оси симметрии вала 6. Для того, чтобы угол атаки профиля плавника 5 был оптимальным во всех точках его траектории, к нему крепятся пружины 17.и 19. С этой же целью рычаг 14 выполнен упругим, способным изгибаться в горизонтальной плоскости. jv В зависимости от скорости движения , физических свойств окружающей среды и индивидуальных мускульных характеристик гребца, расстояние точки приложения подъемной силы до оси симметрии вала 6, а также соотношение величине подъемной силы и силы, препятствующей развороту плавника, могут изменяться.
В зависимости от условий.движения и физических свойств гребца может 0 изменяться частота колебания плавника, для поддержания оптимального угла атаки-плавника муфта 15 переставляется на необходимое расстояние от плавника.
jj При длительнс плавании в зависимости от утомляемости гребца, а также различных метеоусловий может изменяться частотно-амплитудный режим колебаний плавникового движителя. Q Взависимости от конструкции и размеров лодки, а также физических характеристик гребца телескопический рычаг 14 может изменять свою длину для сохранения оптимальной частотноамплитудной характеристики плавникового движителя.
Для уменьшения гидродинамического сопротивления плавникового движителя рычаг вынесен из воды, а для повышения стабилизации движения зона приФО ложения тяги (задняя стойка 35)
приближена к центрс1М тяжести и бокового давления движущегося объекта.
Для повышения универсальности плавникового движителя плавник может 55 выполнять функции руля, для чего в отверстие 13 устанавливается стопор. Кроме того, плавниковый движитель может служить в качестве мачты для закрепления паруса. При этом плавник 1 стопорится в горизонтальном положении с помощью стопора, устанавливаемого в отверстии 8. Затем рычаг 14 стопорится в вертикальном положении с помощью стопора, устанавливаемого в отверстии 31. Плавниковый движитель может устанавливаться на любой лодке эа счет отверстий 36, предназначенных дли регулировки длины стоек 35.-{фоме то го, это позволяет обеспечить необходимое расположение педалей по высоте и, тем сгииым, уменьшить утомляемость гребца.. Весь плавниковый движитель легко разбирается на отдельные компактные узлы для удобства перемещения в упакованном виде. Формула изобретения Плавниковый движитель дли лодок, содержащий плавник в форме крыла малого удлинения с дугообразной задней стенкой и с переменной упругость по длине, и связанный с плавником подпружиненный раЧаг, кинематически взаимодействующий с ножным приводом, включающим в себя педали, и кинематически связанным механизмом передачи с плавником, отличающийся тем, что, с целью повьиления плавности работы и универсальности/ механизм передачи ножного привода снабжен водилом, регулируемой центральной и боковыми тягами, муфтой, вертикальным валом для плавника и коробчатыми хомутами, при этом подпружи. рычаг выполнен телескопическим: с рядом поперечных отверстий, на котором с возкюжностью фиксации в поперечных отверстиях установлена муфта, связанная с регулируемой центральной тягой, а плавник выполнен в виде металлической пластины,обтянутой эластомером и прикреплен к вертикальному валу,,при этом коробчатые хомуты связаны с водилом и посредством тяг с педалями ножного привода. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 484129, кл. В 63 Н 1/36, 1973, (прототип).
«
N
.J
| название | год | авторы | номер документа |
|---|---|---|---|
| Машущий плавниковый движитель | 1973 |
|
SU484129A1 |
| ПРИВОД ПЛАВНИКОВОГО ДВИЖИТЕЛЯ | 2005 |
|
RU2284945C1 |
| КОРАБЛЬ С ПЛАВНИКОВЫМ ДВИЖИТЕЛЕМ | 2007 |
|
RU2360831C2 |
| ПЛАВНИКОВЫЙ ДВИЖИТЕЛЬ | 1990 |
|
RU2025405C1 |
| Движитель водного транспорта | 2019 |
|
RU2712356C1 |
| СПОСОБ ОБРАЗОВАНИЯ МАХОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ В ВИДЕ МАШУЩЕГО ВИНТА | 2010 |
|
RU2482010C2 |
| МУСКУЛЬНЫЙ ПЛАВАЮЩИЙ МАХОЛЕТ "ЛЕБЕДУШКА" | 2004 |
|
RU2304546C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДВИЖЕНИЯ ПЛОВЦА ПОД ВОДОЙ | 1995 |
|
RU2083251C1 |
| ПРОНИЦАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 1993 |
|
RU2081028C1 |
| СУДНО-КАТАМАРАН | 1992 |
|
RU2081779C1 |