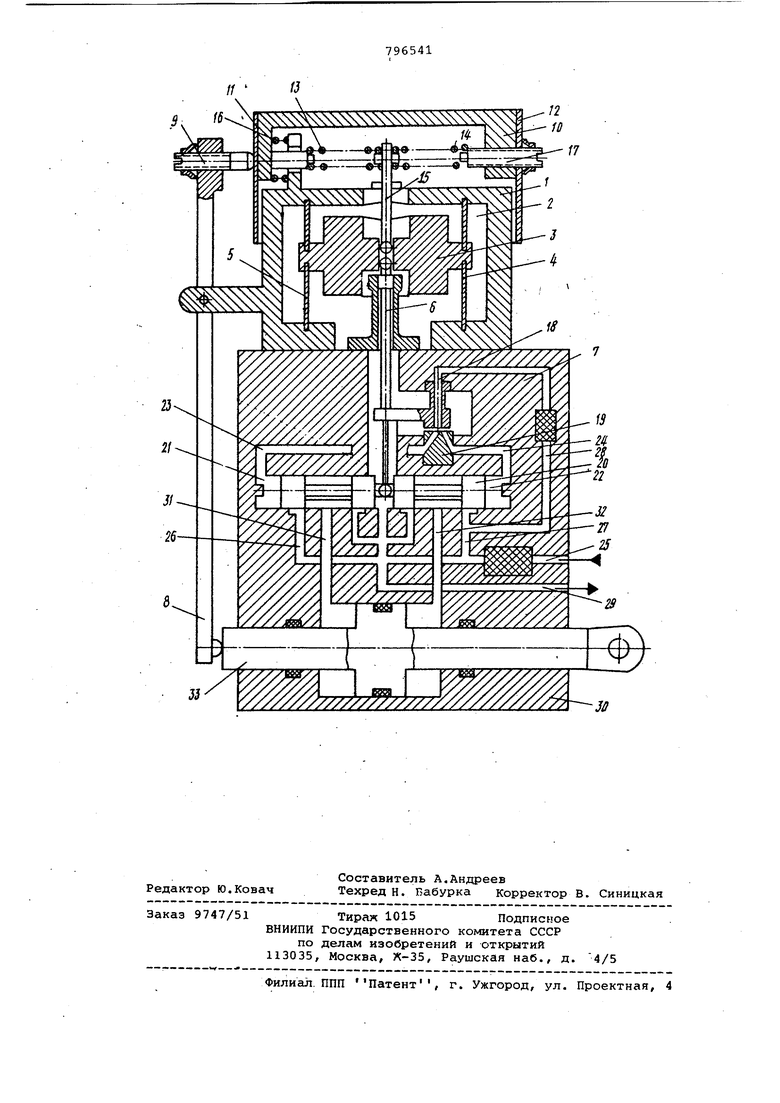
упирается в рамку 10, закрепленную на корпусе акселерометра 1 с помощью iinocKHX пружин И и12. Внутри рамки соосно установлены две цилиндрические пружины 13 и 14, дополнительный рлчаг 15 одним концом расположен между торцами пружин, а другим вза- имодействует с массой 3. Между корпусом 1 и рамкой 10 расположена дополнительная пружина 16. Сжатие пружин 13 и 14 регулируется винтом 17,
Двухкаскадный гидроусилитель 7 содержит элемент управления в виде струйной трубки 18 и приемника 19, распределительный золотник 20, торцовые камеры 21 и 22 которого сообщаются гидролиниями 23 и 24 с приемником 19. Подвод рабочей жидкости к золотнику 20 осуществляется по гидролиниям 25 - 27, к струйной трубке - по гидролинии 28, а отвод жидкости - по гидролинии 29. Золотник 20 связан с испольным гидроцилиидром 30 гидролиниями 31 и 32.
Автомат демпфирования рае)отает следующим образом.
Перед началом работы автомата шток 33 устанавливают в нейтральном положении, регулировочный винт 9 обеспечивает контакт рычага 8 с рамкой 10. Под действием линейного ускорения масса 3 акселерометра перемещается, например, вправо, рабочая жидкость-по гидролиниям 25 и 28 . через струйную трубку 18 и Левое окно приемника 19 поступит в торцовую камеру 21 золотника 20. Золотник 20 переместится .вправо и соединит гидролинии 25 и 32. Жидкость поступит в гидроцилиндр 30 и переместит шток 33 влево, рычаг, обратной связи 8 через регулировочный винт 9 сместит рамку 10 вправо и через пружины 13 и 14 и дополнительный рычаг 15 возвратит массу 3 в первоначальное положение.-
Механическая обратная связь, охватывающая весь контур автомата демпфирования, исключает влияние нестабильной работы промежуточных элементов на выходные характеристики с из-за изменения эксплуатационныхусловий. Использование автомата демпфирования приведет к улучшению условий эксплуатации самолета и его агрегатов. - Формула изобретения
Гидромеханический автомат демпфирования, содержащий корпус и помещенный в нем акселерометр с чувствительным элементом в виде
f } нерционной массы, двухкаскадный
гидроусилитель, взаимодействующий с массой, и рычаг обратной связи, один конец которого соединен с выходом гидроусилителя, отличающийся тем, что, с целью улучшения эксплуатационных характеристик, автомат снабжен, закрепленной на корпусеакселерометра с помощью плоских пружин рамкой, помещенными в рамкудвумя соосно расположенными
5 цилиндрическими пружинами, дополнительным рычагом, один конец которого расположен между торцами пружин, а другой взаимодействует с массой, дополнительной пружиной, расположенной между .корпусом и рамкой, а другой конец рычага обратной связи взаимодействует с рамкой через регулировочньлй винт.
Источники информации,
c принятые вс внимание при экспертизе
1.Склянский Ф.И. Динамика полета и управляемость тяжелых реактивных самолетов. М., Машиностроение. 1976, с. 49.
2.SAE preprints 700794 National 0 Aeronautic and Space Engineering and
Manafacturing Meeting, Los Angeles, CaTifornia,October 5-9, 1970 (прототип) , ; 4V, 

| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический усилитель | 1979 |
|
SU857570A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЕРВОКЛАПАН | 1992 |
|
RU2030658C1 |
| Регулятор скорости и нагрузки для дизеля | 1978 |
|
SU787702A1 |
| ТРАНСПОРТНЫЙ САМОЛЕТ "САМОЛЕТ В.С.ГРИГОРЧУКА" | 1995 |
|
RU2086478C1 |
| ЧЕТЫРЕХЛИНЕЙНЫЙ ТРЕХПОЗИЦИОННЫЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С РЕЗЕРВИРОВАННЫМ ЭЛЕКТРОУПРАВЛЕНИЕМ ПРИВОДА ПОВОРОТА КОЛЕС ПЕРЕДНЕЙ ОПОРЫ ШАССИ ТРАНСПОРТНОГО СРЕДСТВА С ГИДРОДЕМПФЕРОМ | 2007 |
|
RU2342283C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С ТРЕХКАСКАДНЫМ ЭЛЕКТРОГИДРОУСИЛИТЕЛЕМ | 2012 |
|
RU2505715C1 |
| Гидравлическая система управления механизмами транспортного средства | 1987 |
|
SU1504142A1 |
| Гидравлический усилитель | 1979 |
|
SU787740A1 |
| Механизм управления поворотом гусеничного трактора | 1985 |
|
SU1311988A1 |
| Гидропривод тормозной системы автогрейдера | 1990 |
|
SU1735613A1 |