(54) ПЛАНЕТАРНО-РЫЧАЖНЫЙ МЕХАНИЗМ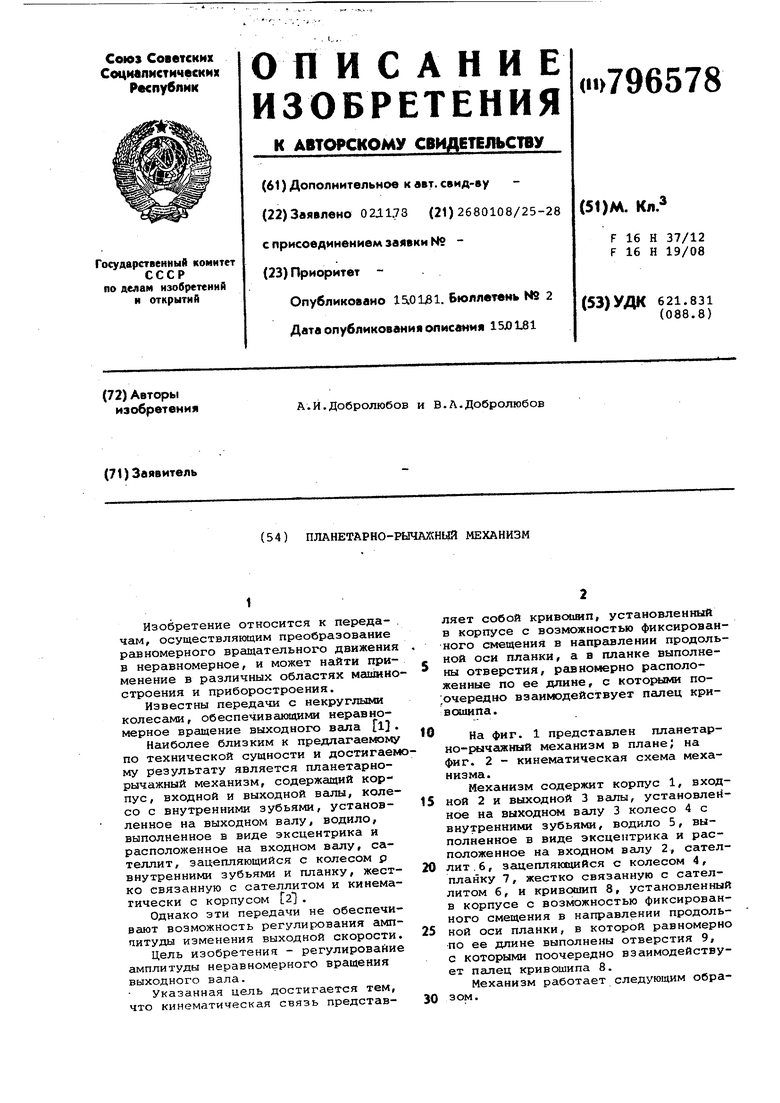
| название | год | авторы | номер документа |
|---|---|---|---|
| Планетарно-кривошипный механизм возвратно-поступательного движения | 1983 |
|
SU1130711A1 |
| Зубчато-рычажная планетарная передача | 1979 |
|
SU892052A1 |
| Перемешивающее устройство с неравномерным движением рабочего органа | 2020 |
|
RU2779980C2 |
| Рычажно-зубчатый механизм с остановками | 1987 |
|
SU1493838A1 |
| Планетарная передача с предварительной ступенью | 2022 |
|
RU2782006C1 |
| ЭКСЦЕНТРИКОВАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА ВНУТРЕННЕГО ЗАЦЕПЛЕНИЯ | 2005 |
|
RU2313016C2 |
| Планетарный механизм и планетарная передача на его основе | 2018 |
|
RU2677952C1 |
| ПЛАНЕТАРНЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР | 1999 |
|
RU2153613C1 |
| Рычажно-зубчатый механизм с остановками | 1987 |
|
SU1421923A1 |
| РАБОЧИЙ МЕХАНИЗМ РУЧНОЙ МАШИНЫ ДЛЯ УДАРНОГО СВЕРЛЕНИЯ И/ИЛИ ДОЛБЛЕНИЯ | 2010 |
|
RU2550469C2 |
1
Изобретение относится к переда- . чам, осуществляющим преобразование равномерного вращательного движения в неравномерное, и может найти применение в различных областях машиностроения и приборостроения.
Известны передачи с некруглыми колесами, обеспечивающими неравномерное вращение выходного вала l.
Наиболее близким к предлагаемому по технической сущности и достигаемму результату является планетарнорычажный механизм, содержащий корпус, входной и выходной валы, колесо с внутренними зубьями, установленное на выходном валу, водило, выполненное в виде эксцентрика и расположенное на входном валу, сателлит, зацепляющийся с колесом р внутренними зубьями и планку, жестко связанную с сателлитом и кинематически с корпусом 2 .
Однако эти передачи не обеспечивают возможность регулирования амппитуды изменения выходной скорости.
Цель изобретения - регулирование амплитуды неравномерного вращения выходного вала.
Указанная цель достигается тем, что кинематическая связь представляет собой КРИВСЯШ1П, установленный в корпусе с возможностью фиксированного смещения в напргшленин продольной оси планки, а в планке выполнены отверстия, равномерно расположенные по ее длине, с которыми поочередно взаимодействует палец кривсшипа.
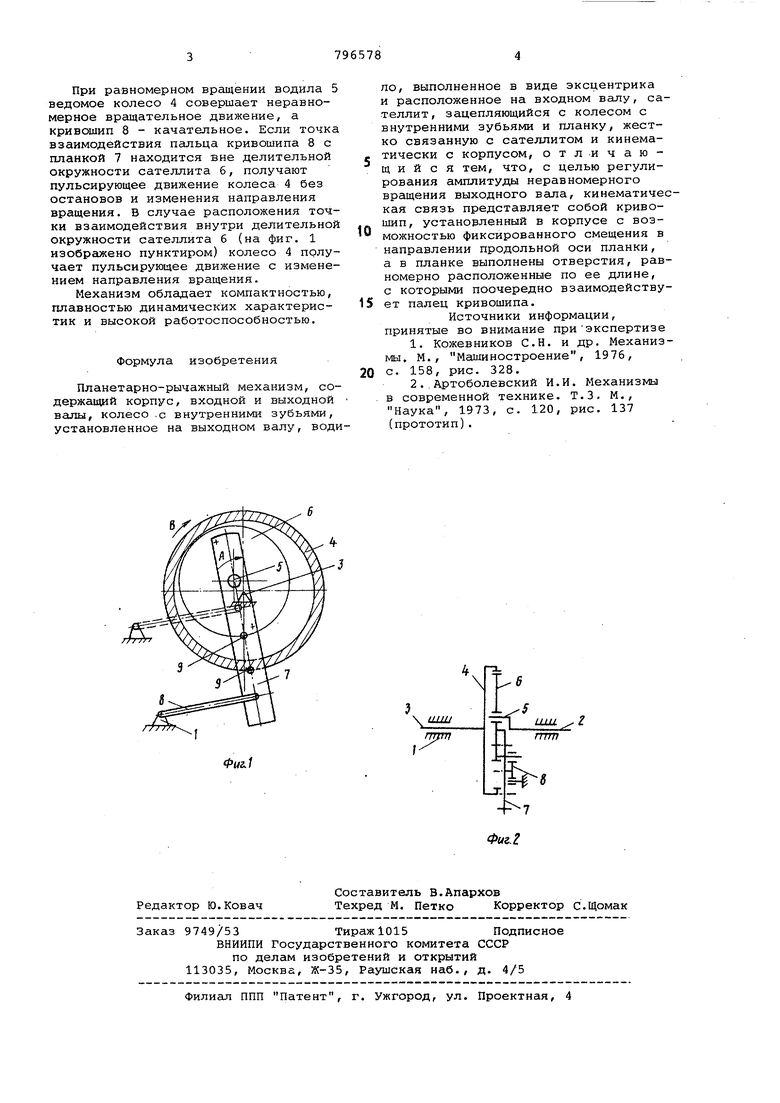
На фиг. 1 представлен планетарно-рычажный механизм в плане; на фиг. 2 - кинематическая схема механизма.
Механизм содержит корпус 1, входной 2 и выходной 3 валы, установлейное на выходнсял валу 3 колесо 4 с внутренними зубьями, водило 5, выполненное в виде эксцентрика и расположенное на входном валу 2, сателлит,6, зацепляющийся с колесом 4, планку 7, жестко связанную с сателлитом 6, и кривошип 8, установленный в корпусе с возможностью фиксированного смещения в направлении продольной оси планки, в которой равномерно по ее длине выполнены отверстия 9, с которыми поочередно взаимодействует палец кривошипа 8.
Механизм работает следующим образом.
При равномерном вращении водила 5 ведомое колесо 4 совершает неравномерное вращательное движение, а кривошип 8 - качательное. Если точка взаимодействия пальца кривошипа 8 с планкой 7 находится вне делительной окружности сателлита б, получают пульсирующее движение колеса 4 без остановов и изменения направления вращения. В случае расположения точки взаимодействия внутри делительной окружности сателлита 6 (на фиг. 1 изображено пунктиром) колесо 4 получает пульсирующее движение с изменением направления вращения.
Механизм обладает компактностью, плавностью динамических характеристик и высокой работоспособностью.
Формула изобретения
Планетарно-рычажный механизм, содержащий корпус, входной и выходной валы, колесо .с внутренними зубьями, установленное на выходном валу, водило, выполненное в виде эксцентрика и расположенное на входном валу, сателлит, зацепляющийся с колесом с внутренними зубьями и планку, жестко связанную с сателлитом и кинематически с корпусом, отличающийся тем, что, с целью регулирования амплитуды неравномерного вращения выходного вала, кинематичекая связь представляет собой кривошип, установленный в корпусе с возможностью фиксированного смещения в направлении продольной оси планки, а в планке выполнены отверстия, равномерно расположенные по ее длине, с которыми поочередно взаимодействует палец кривошипа.
Источники информации, принятые во внимание приэкспертизе
с. 158, рис. 328.
