00
о
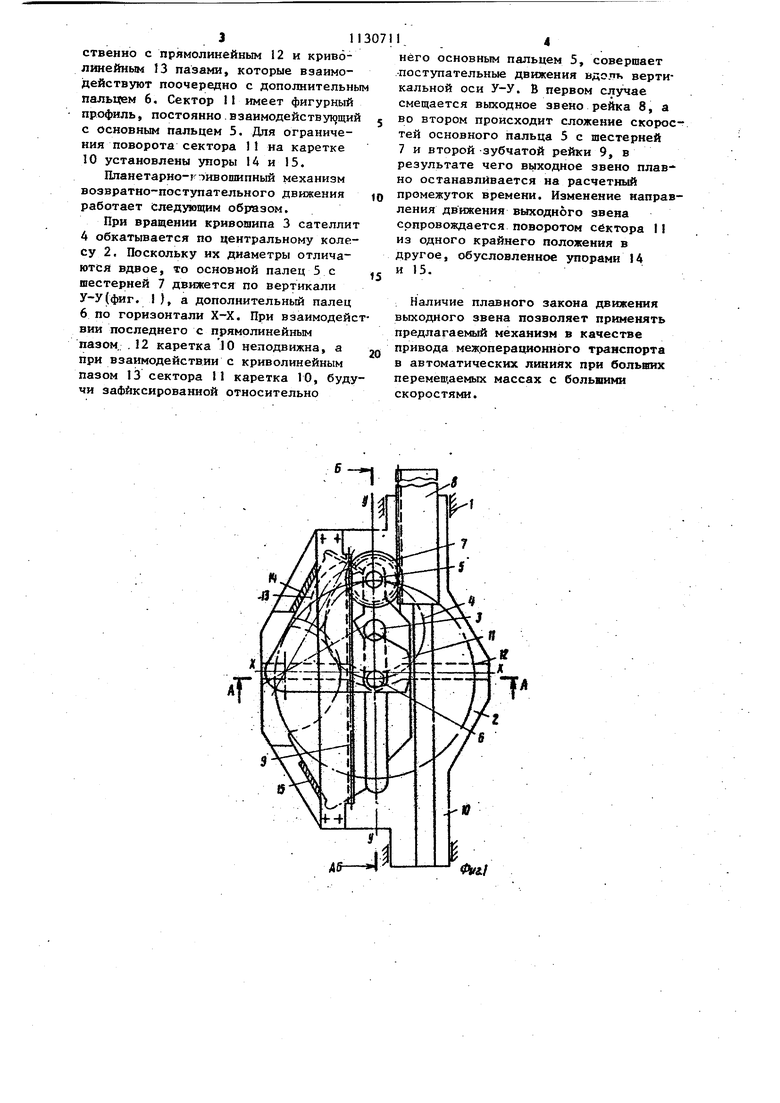
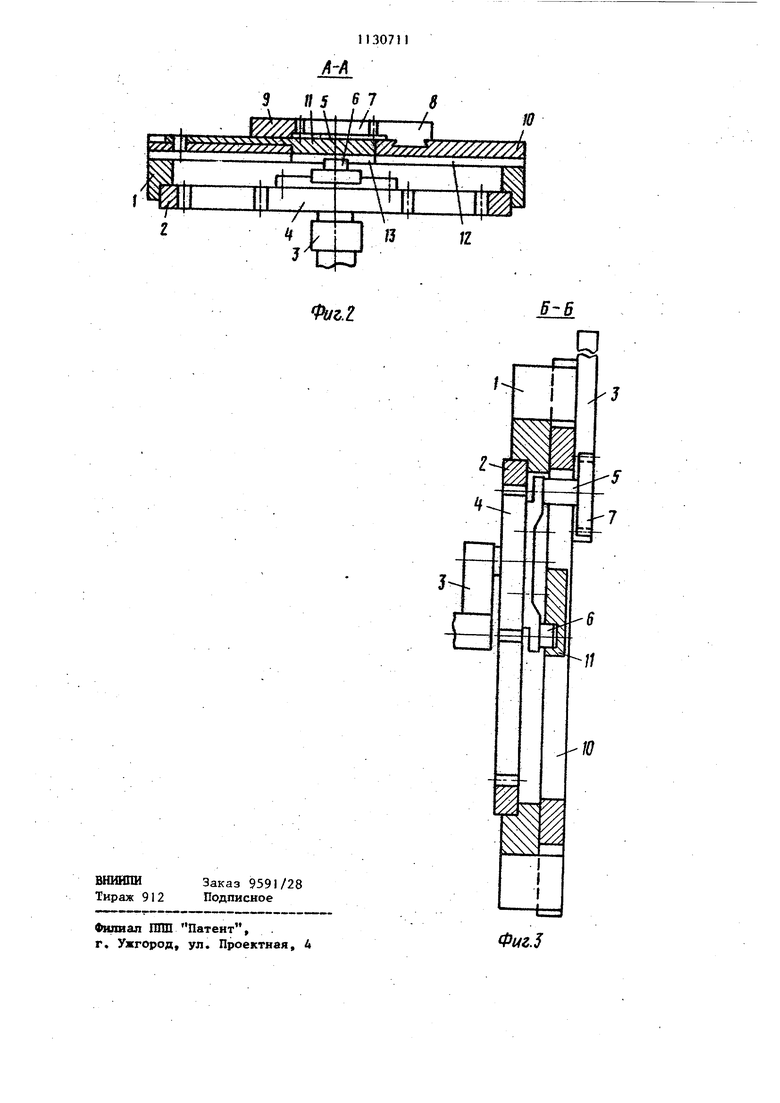
1и Изобретение относится к машиностроению и может быть использовано в машиках-автоматах многих отраслей промышленности, где требуется возвратно-поступательное движение ведомого звена с остановкой. Известен кривошипно-ползунный механизм, содержащий корпус с направ ляюпщм пазом, кривошип, установленнк в корпусе с возможностью вращения, зубчатое колесо, шарнирно связанное с кривошипом, зксцентричный палец, имеющий общую ось вращения с зубчаты колесом, шарнирно связанньм с криво шипом, второе зубчатое колесо, . жестко связанное с эксцентричным пальцем, ползун, взаимодействующий с направляющим пазом, и шатун, шарнирно связанный с ползуном fl J. Недостатком данного механизма является наличие больших динамических перегрузок в результате периоди ческого взаимодействия зубчатого колеса эксцентрика с другими зубчат ми колесами. Наиболее близким к изобретению является планетарно-кривошипный мех низм возвратно поступательного движ ния, содержащий корпус, центральное колесо с внутренними зубьями, закрепленное в корпусе, кривошип, установленный на нем сателлит, диаметр начальной окружности которого вдвое меньше диаметра центрального колеса с внутренними зубьями, основ ной палец,установленный на начально окружности сателлита, и кинематичес ки с ним связанное выходное звено. Вьрсодное звено выполнено в виде ползуна, а кинематическая связь-в виде рычажноГо зксцентрикового механизма. В известном механизме, благодаря постоянной кинематической связи зксцентрика с выходным звеном в крайних положениях последнего нет динамических ударов 2. Однако в силу все той же постоян ной кинематической связи скорость движения выходного звена на всем пути его перемещения будет неравномерной, что приведет к динамическим нагрузкам с частотой вращения эксцентрика. Целью изобретения является сниже ние динамических нагрузок. Поставленная цель достигается тем, что в планетарно-кривошипном механизме с возвратно-поступательны движением, содержащем корпус, центральное колесо с внутренними зубьями, зёкрепленное в корпусе, кривошип, установленный на нем сателлит, диаметр начальной окружности которого вдвое меньше диаметра центрального колеса с внутренними зубьями, основной палец, установленный на начальной окружности сателлита, и кинематически с ним связанное вьрсодное звено, последнее выполнено в виде зубчатой рейки, кинематическая связь - в виде зацепляющейся с последней шестерни, установленной на основном пальце, механизм снабжен имеющей прямолинейный паз и несущей вторую зубчатую рейку, взаимодействующую с шестерней, кареткой, установленной в корпусе с возможностью поступательного движения в направлении, перпендикулярном пазу, шарнирно расположенным в последней и взаимодействующим с основным пальцем сектором с криволинейным пазом, дополнительным пальцем, установленным на начальной окружности сателлита диаметрально противоположно основному и взаимодействующим поочередно с пазами каретки и сектора. На фиг. 1 представлена кинематическая схема планетарно-кривошипнсго механизма возвратно-поступательного движения; на фиг. 2 - разрез А-А на фит. I; на фиг. 3 - разрез Б-В на фиг. 1. Планетарно-криношипный механизм возвратно-поступательного движения содержит корпус 15 центральное колесо 2 с внутренними зубьями, закреплепное жестко в корпусе I. Соосно центральному колесу 2 установлен с возможностью вращения кривошип 3, на котором расположен сателлит 4, взаимодействующий с центральным колесом 2, радиус начальной окружности которого вдвое больше радиуса сателлита 4. На начальной окружности последнего диаметрально .противоположно . друг другу устновле-ны пальцы: основной 5 и дополнительньгй 6. На основном пальце 5, расположаиа шестерня 7, взаимодействующая одновременно .с Зубчатой рейкой 8 - выходным звеном механизма и второй зубчатой рейкой 9, соединенной жестко с кареткой 10, установленно.й в корпусе 1 с возможностью поступательного движения. На каретке 10 шарнирно установлен сектор 1I. Каретка 10 и сектор I выполнены соответ311ственно с прямолинейным 12 и криволинейным 13 пазами, которые взаимодействуют поочередно с дополнительны пальцем 6, Сектор П имеет фигурный профиль, постоянно.взаимодействующий с основным пальцем 5, Для ограничения поворота сектора 11 на каретке 10 установлены упоры 14 и 15. Планетарно-г эивошипный механизм возвратно-поступательного движения работает След5 }щим образом. При вращении кривошипа 3 сателлит 4 обкатывается по центральному колесу 2. Поскольку их диаметры отличаются вдвое, то основной палец 5 с шестерней 7 движется по вертикали У-У(4иг. I ), а дополнительный палец 6 по горизонтали Х-Х. При взаимодейс вии последнего с прямолинейным пазом, .12 каретка 10 неподвижна, а при взаимодействии с криволинейным пазом 13 сектора 11 каретка Ю, буду чи зафиксированной относительно 1,4 него основным пальцем 5, совершает поступательные движения вдоль вертикальной оси У-У. В первом случае смещается выходное звено рейка 8, а во втором происходит сложение скоростей основного пальца 5 с шестерней 7 и второй зубчатой рейки 9, в результате чего выходное звено плав но останавливается на расчетный промежуток времени. Изменение направления движения выходного звена сопровождается поворотом сектора II из одного крайнего положения в другое, обусловленное упорами 14 и 15. Наличие плавного закона движения выходного звена позволяет применять предлагаемый механизм в качестве привода межрперационного транспорта в автоматических линиях при больших перемещае) массах с большими скоростями.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДАЮЩЕЕ УСТРОЙСТВО | 1995 |
|
RU2080953C1 |
| Привод клети стана холодной прокатки труб | 1989 |
|
SU1729637A1 |
| РЫЧАЖНО-ЗУБЧАТЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В СЛОЖНОЕ | 1991 |
|
RU2011909C1 |
| ПРЕОБРАЗОВАТЕЛЬ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПОСТУПАТЕЛЬНОЕ | 2011 |
|
RU2475665C1 |
| ИМПУЛЬСНЫЙ ВАРИАТОР | 2016 |
|
RU2620278C2 |
| Устройство для захвата и подачи плоских изделий | 1986 |
|
SU1375548A1 |
| Грейферное устройство для подачи заготовок в рабочую зону пресса | 1971 |
|
SU401092A1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ | 2002 |
|
RU2224935C2 |
| Приводное устройство регулируемого объемного насоса | 1984 |
|
SU1652648A1 |
| Механизм возвратно-поступательного движения | 1979 |
|
SU861796A1 |
Ш1АНЕТАРНО-КРИВОШИПНЫЙ МЕХАНИЗМ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ, содержащий корпус,центральное колесо с внутренними зубьями, закрепленное в корпусе, кривошип, установленный на нем сателлит, диаметр начальной окружности которого вдвое меньше диаметра центрального колеса с внутренними зубьями, основной палец, установленный на начальной окружности сателлита, и кинематически с ним связанное выходное звено, отличаю щийся тем, что с целью снижения динамических нагрузок, выходное звено выполнено в виде зубчатой рейки, кинематическая связь - в виде зацепляющейся в.последней шестерни, установленной на основном пальце, механизм снабжен имеющей прямолинейный паз и несущей вторую зубчатую рейку, взаимодействующую с шестерней, кареткой, установленной в корпусе с возможностью поступательного движения в направлении, перпендикулярном пазу, шарнирно расположенным в последней и взаимодействующим с Основным пальцем сектором с кривоi (Л линейным пазом, дополнительным пальцем, установленным на начальной окружности сателлита диаметрально противоположно основному и взаимодействующим поочередно с пазами § каретки и .сектора.
е-в
-ff //
ta
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кривошипно-шатунный механизм | 1977 |
|
SU685867A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кривошипно-ползунный механизм | 1980 |
|
SU1011937A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
