(54) УСТРОЙСТВО АВТОМАТИЧЕСКОГО .КОНТРОЛЯ ПРЯМОЛИНЕЙНОСТИ МЕХАНИЗИРОВАННОЙ КРЕПИ ОЧИСТНОГО АГРЕГАТА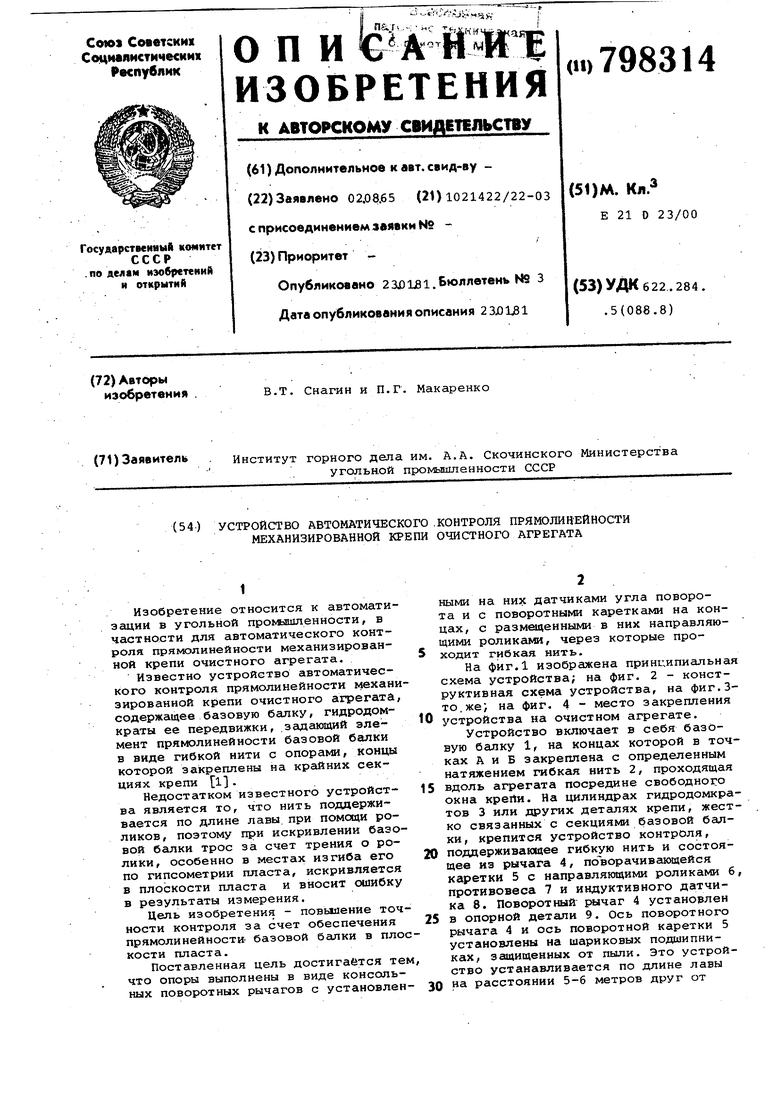
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОДДЕРЖАНИЯ ПРЯМОЛИНЕЙНОСТИ БАЗЫ КРЕПИ | 1991 |
|
RU2024765C1 |
| Способ автоматического поддерживания прямолинейности в плоскости пласта шахтных механизированных крепей | 1967 |
|
SU450892A1 |
| Система управления передвижением базы механизированной крепи | 1980 |
|
SU909204A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ КРУТЫХ ПЛАСТОВ | 2011 |
|
RU2514059C2 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ КРУТЫХ ПЛАСТОВ | 2011 |
|
RU2487244C1 |
| КОМПЛЕКТНО-АГРЕГАТНАЯ МЕХАНИЗИРОВАННАЯ КРЕПЬ | 1992 |
|
RU2015338C1 |
| Устройство для управления перемещением базы механизированной крепи | 1980 |
|
SU877058A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ КРУТЫХ ПЛАСТОВ | 2007 |
|
RU2357083C1 |
| МЕХАНИЗИРОВАННАЯ ПНЕВМАТИЧЕСКАЯ КРЕПЬ | 2003 |
|
RU2244832C1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ КРУТЫХ ПЛАСТОВ | 2011 |
|
RU2482277C1 |
1
Изобретение относится к автоматизации в угольной промышленности, в частности для автоматического контроля прямолинейности механизированной крепи очистного агрегата.
Известно устройство автоматического контроля прямолинейности механизированной крепи очистного агрегата, содержащее базовую балку, гидродомкраты ее передвижки, задающий элемент прямолинейности базовой балки в виде гибкой нити с опорами, концы которой закреплены на крайних секциях крепи 1 .
Недостатком известного устройства является то, что нить поддерживается по длине лавы, при помощи роликов, поэтому при искривлении базовой балки трос за счет трения о ролики, особенно в местах изгиба его по гипсометрии пласта, искривляется в плоскости пласта и вносит сшибку в результаты измерения.
Цель изобретения - повышение точности контроля за счет обеспечения прямолинейности базовой балки в плоскости пласта.
Поставленная цель достигается тем что опоры выполнены в виде консольных поворотных рычагов с установленными на них датчиками угла поворота и с поворотными каретками на концах, с размещенными в них направляющими роликами, через которые проходит гибкая нить.
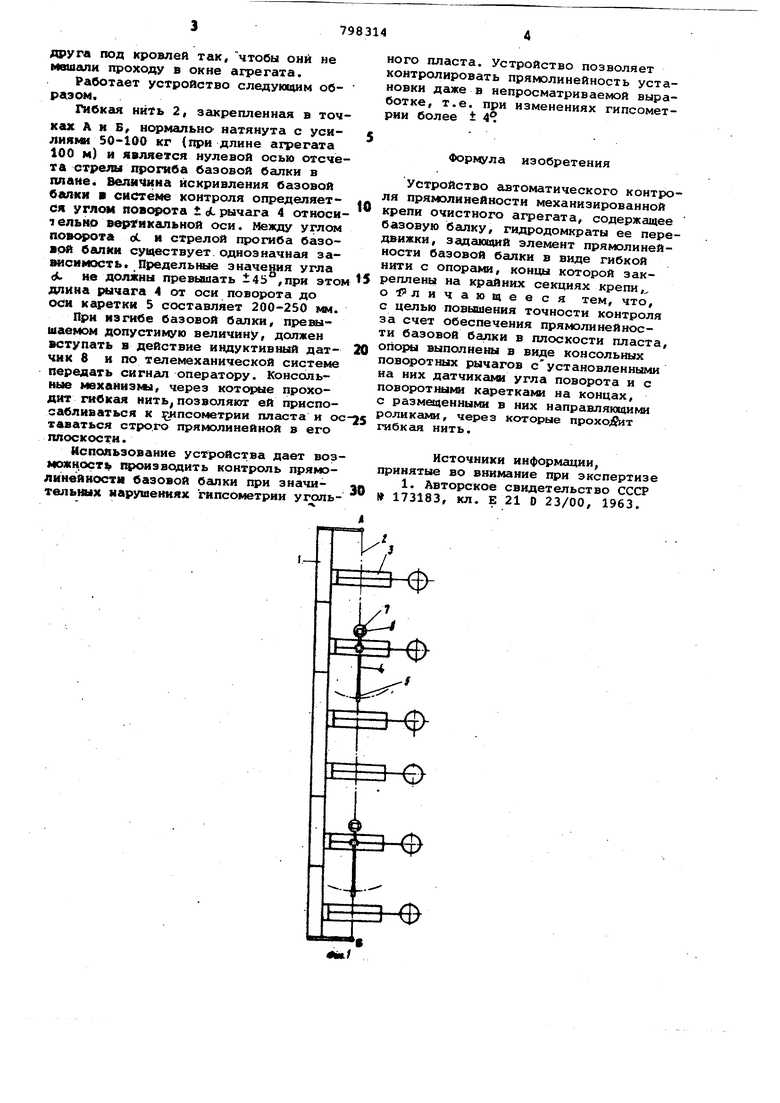
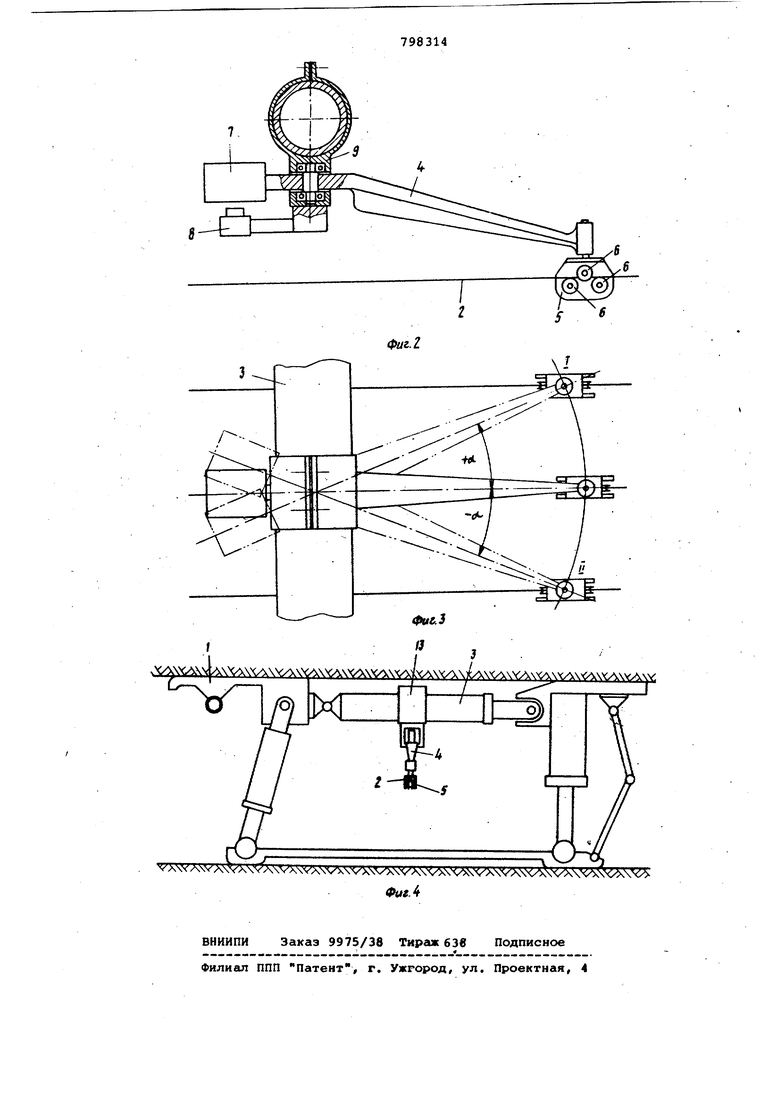
На фиг.1 изображена принципиальная схема устройства; на фиг. 2 - конструктивная схема устройства, на фиг.Зто.же; на фиг. 4 - место закрепления
устройства на очистном агрегате.
Устройство включает в себя базовую балку 1, на концгис которой в точках А и Б закреплена с определенным натяжением гибкая нить 2, проходящая
вдоль агрегата посредине свободного окна кре11и. На цилиндрах гидродомкратов 3 или других детсшях крепи, жестко связанных с секциями базовой балки, крепится устройство контроля,
поддерживающее гибкую нить и состоящее из рычага 4, подворачивающейся каретки 5 с направляющими роликами 6, противовеса 7 и индуктивного датчика 8. Поворотный рычаг 4 установлен
в опорной детали 9. Ось поворотного рычага 4 и ось поворотной каретки 5 установлены на шариковых подшипниках, защищенных от пыли. Это устройство устанавливается по длине лавы
на расстоянии 5-6 метров друг от лруга под кровлей так, чтобы они не мешали проходу в окне агрегата. Работает устройство следующим образом. Шбкая Kiftb 2, зсжрепленная в точ ках А и Б, нормальна натянута с усилиями 50-100 кг (при длине агрегата 100 м) и является нулевой осью отсче та стрелы щ огиба базовой балки в плане. Величина искривления базовой САДКИ 9 системе контроля определяется углом nOBqppra ± dL рычага 4 от носи 1елыю веспгикальной оси. Между углом оС и стрелой прогиба базолол балки су1йествует однозначная зависимость Преде л ыше значения угла dU не должны превьшать ±45 ,при это длина рычага 4 от оси поворота до оси каретки 5 составляет 200-250 мм. При изгибе базовой бгшки, превышаемом допустимую величину, должен вступать в действие индуктивный датчик 8 и по телемеханической системе передать сигнал оператору. Консольные механизмы, через кота{яле проходит гибкая нить, позволяют ей приспосабливаться к псометрии пласта и ос таваться стро.го прямолинейной в его плоскости. Использование устройства дает воз14ожн1ость щюизв эдить контроль прямолинейности базовой балки при значительных нарушениях гипсометрии угрпьного пласта. Устройство позволяет контролировать прямолинейность установки даже в непросматриваемой выработке, т.е. при изменениях гипсометрии более t 4° Формула изобретения Устройство автоматического контроля прямолинейности механизированной крепи очистного агрегата, содержащее базовую балку, гидродомкраты ее передвижки, задающий злемент прямолинейности базовой балки в виде гибкой нити с опорами, концы которой закреплены на крайних секциях крепи , о1 личающееся тем, что, с целью повышения точности контроля за счет обеспечения прямолинейности базовой балки в плоскости пласта, опоры выполнены в виде консольных поворотных рычагов сустановленными на них датчиками угла поворота и с поворотными каретками на концах, с размещенными в них направляющими оликами, через которые прохо ит гибкая нить. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 173183, кл. Е 21 D 23/00, 1963.
