() СИСТЕМА УПРАВЛЕНИЯ ПЕРЕДВИЖЕНИЕМ БАЗЫ МЕХАНИЗИРОВАННОЙ КРЕПИ


| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО ПОДДЕРЖАНИЯ ПРЯМОЛИНЕЙНОСТИ БАЗЫ МЕХАНИЗИРОВАННОЙ КРЕПИ | 1973 |
|
SU391277A1 |
| Способ автоматического поддерживания прямолинейности в плоскости пласта шахтных механизированных крепей | 1967 |
|
SU450892A1 |
| Устройство для управления перемещением базы механизированной крепи | 1977 |
|
SU726347A1 |
| Устройство автоматического поддержания заданной толщины стружки очистного агрегата | 1979 |
|
SU881343A1 |
| Устройство для управления перемещением базы механизированной крепи | 1980 |
|
SU877058A1 |
| Устройство для управления перемещением базы механизированной крепи | 1978 |
|
SU727857A1 |
| Способ управления перемещением базы механизированной крепи | 1980 |
|
SU877059A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ КРУТЫХ ПЛАСТОВ | 2007 |
|
RU2357083C1 |
| Устройство для управления перемещением базы механизированной крепи | 1979 |
|
SU877057A1 |
| УСТРОЙСТВО ДЛЯ ПОДДЕРЖАНИЯ ПРЯМОЛИНЕЙНОСТИ БАЗЫ КРЕПИ | 1991 |
|
RU2024765C1 |
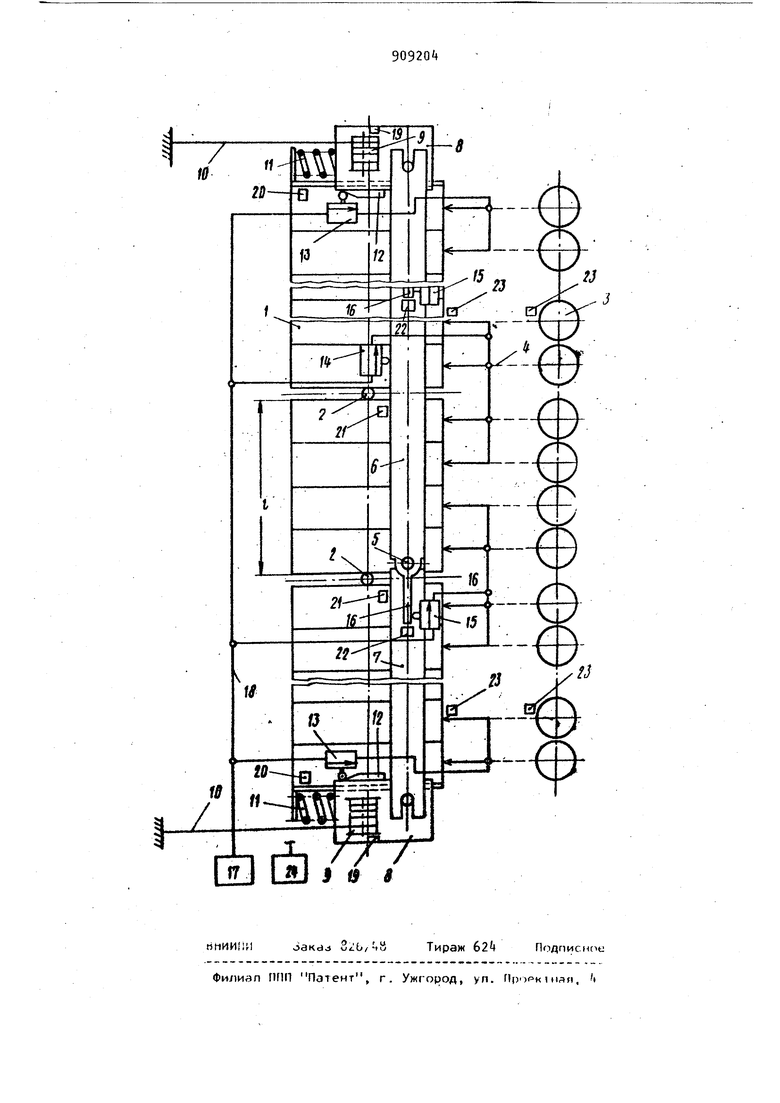
Изобретение относится к угледобывающим агрегатам и комплексам, а имен но, к автоматизации управления перемещением базы в плоскости пласта. Известно устройство для управления перемещением базы механизированной крепи, включающее задающий стальной трос, натянутый вдоль базы агрегата и закрепленный по ее концам на автономных передвижчиках, поддерживающие трос опоры с датчиками прямолинейности и электрогидроклапаны. Автономные передвижчики выполнены в виде под вижных площадок с поворотными барабанами, на которые намотаны гибкие нити, закрепленные концами в опережающих очистной забой горных выработках D 1. Недостатком этого устройства управ ления перемещением базы является его сложность (.наличие датчиков прямолинейности, специальных электрогидроклапанов с искробезопасными цепями и другой .электроаппаратуры) и, в связи С этим.недостаточная эксплуатационная надежность в условиях очистного забоя. Наиболее близкой к предлагаемой по технической сущности и достигаемому результату является система управления передвижением базы механизированной крепи, включающая задающий элемент, закрепленный по концам базы на автономных передвижчиках, и выполненный из отдельных, жестких в плоскости пласта отрезков, соединенных между собой шарнирно, посредством валиков, гидрораспределители, размещенные на одном конце каждого.отрезка задающего элемента и на секциях базы, гидродомкраты передвижки базы 12. Недостатком ее является относительная сложность следящего приводного устройства, выполненного в виде каретки, гидродомкрата и двух гидроклапанов. Размещение такого привода на секции базы (например конвейера агрегата конструктивно сложно,,а надежность 39 работы каретки, передвигающейся по на правлягсщим базы в условиях очистного забоя, низкая. Цель изобретения - повышение эксплуатационной надежности устройства. Поставленная цель достигается тем что валики шарнирно задающего элемента жестко закреплены, на секциях базы а гидрораспределители подключены к группам гидродомкратов передвижки базы, размещенных симметрично относительно шарнира базы. На чертеже изображена принципиаль ная схема предлагаемой системы управления передвижением базы механизиро ванной крепи. Система содержит участки базы 1, выполненные из нескольких жестко соединенных в плоскости пласта .ее секций длиною продета S ,.меньше крити ческого. Участки базы соединены между собой в плоскости пласта при помощи шарниров 2. Секции базы соединены с секциями крепи 3 гидродомкратами k (условно показаныпунктиром ), На секциях базы расположенных непосредственно у некоторых шарниров 2, жестко закреплены валики 5 шарниров, соединяющих жёсткие в плоскости пласта отрезки 6 и 7 задающего элемента, закрепленного по концам базы на каретках 8 автоном.ных передвижчиков. Задающий элемент может быть выг полнен из стальных полос, жестких в плоскости пласта и гибких по его гипсометрии. Так как нагрузка на него не значительная, то, согласно предварительным расчетам, размеры каждого отрезка могут быть приняты следующие: длина - 10-15 м, ширина - 0,1 м, толщина - 0,01 м. По длине один отрезок задающего элемента может перекрывать 2-3 участка базы, соединенных шарнирно. Каретки автономных передвижчиков, свободно перемещающихся по направляющим базы, снабжены барабанами 9с приводными устройствами (на схеме при воды не показаны). На барабанах намотаны гибкие нити (тросы) 10, концы ко торых закреплены в опережающих очистной забой горных выработках. Натяжение тросов обеспечивается пружинами 11, удерживающими каретки 8 в исход-.
ном состоянии. Каретки снабжены фигурными выступами 12, взаимодействующими с гидрпраспределителями (клапанами.
с пульта оператора приводов поворачиваются на некоторый угол и наматывают на себя тросы 10. благодаря чему 4 регулируемыми дросселями) 13, закрепленными на базе. Такие же гидрораспределители 1 закреплены на промежуточных участках базы и размещены с возможностью взаимодействия с отрезками задающего элемента. На одном из концов каждого отрезка задающего элемента жестко закреплен гидрораспределитель 15, установ-.. ленный с возможностью взаимодействия, с консолью 16, являющейся продолжением смежного отрезка. Гидродомкраты k секций базы., подключенные к гидрораспределителям 14 и 15, размещены симметрично относительно шарнирных стыков участков базы. Такое размещение их обеспечивает более VaBHOMepHoe распределение усилий, действующих на базу при передвижке, улучшает ее управляемость и повышает надежность работы системы в целом . Давление рабочей жидкости от насосной станции 17 поступает по гидрома- . гистраяи 18 в гидрораспределители 1315, а через них - в гидродомкраты 4 передвижки базй (условно показаны стрелками). Система управления снабжена следующими датчиками контроля (например, магнитоуаравяяемыми) за состоянием отдельных элементов: угловой величины и скороети вращения барабана 19 автоHOMHtitx перелвижчикоЕ (по количеству электрических импульсов); передвижки 20 концов задающего элемента; передвижки 21 участков базы и отрезков задающего элемента; прямолинейности задающего элемента 22 (а, следовательно, и базы); передвижки 23 секций крепи. По электрическим цепям информация поступает на пульт контроля и управления. В связи с тем, .что перечисленные принципы и средства контроля в горной . автоматике достаточно известны, их описание не приводится. В исходном состоянии гидрораспределители 13-15 закрыты и рабочая жидкость в гидродомкраты не поступает. Для передвижки базы на заданный шаг барабаны 9 автономных передвижчиков при помощи дистанционно управляемых концы задающего элемента перемещаются на забой, а его отрезки 6 и 7 полу чают угловое перемещение относительно шарнира 5. При этом открываются гидрораспределители 13-15 от взаимодействия, соответственно с выступами 12, отрезками (6) задающего элемента и консолями 16. Затем от насосной станции 17 в гид ромагистраль 18 подается давление рабочей жидкости, которая поступает через открытые гидрораспределители 1315 в соответствующие группы гидродомкратов 4 и база передвигается на забой относительно неподвижных концов задающего элемента до тех пор, пока каретки 8 под действием пружин 11 не будут возвращены в исходное относительно базы положение, а отрезки 6 и 7 не займут прямолинейное положение. Гидрораспределители 13-15 при этом закрываются и база останавливается, выполнив заданный ей ход. Далее цикл передвижки базы повторяется. Подтягивание секций крепи производится в применямой последовательности. Для управления базой агрегатов фронтального действия барабанам 9 сообщается определенная скорость вратения, которая передается кареткам 8 и концам задающего элемента. При этом пропорционально изменяются рас,ход рабочей жидкости, протекающей через гидрораспределители, а следовательно и скорость передвижения базы.. 9 ,6 Для разворота агрегата в плоскости пласта в работу включается только один из автономных передвижчиков задающего элемента, или каждому из них сообщается различная скорость передвижения. Формула изобретения Система управления передвижением базы механизированной крепи, включающая задающий элемент, закрепленный по концам базы на автономных пере.движчиках и выполненный из отдельных, жестких в плоскости пласта отрезков, соединенных между собой шарнирно посредством валиков, гидрораспределители, размещенные на одном конце каждого отрезка и на секциях базы,гидродомкраты передвижки базы, отличающаяся тем, что, с целью повышения эксплуатационной надежности системы валики шарниров задающего элемента жестко закреплены на секциях базы, а гидрораспределители прдключены к группам гидродомкратов передвижки базы, размещенных симметрично относительно шарнира базы. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР W 7263 7, кл. Е 21 П 23/26, 1977. 2.Авторское свидетельство СССР № 391277, кл. Е 21 D 23/16, 1973 (прототип).
