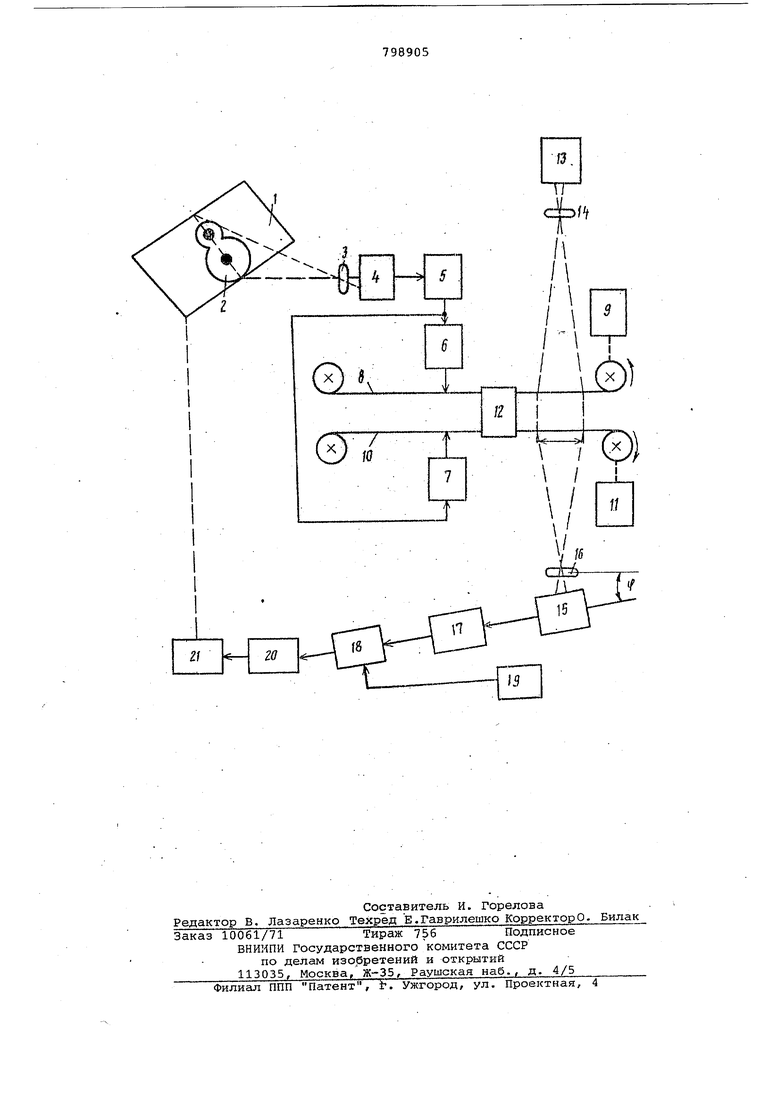
ной блока 5 памяти подается вкод мультипликаторов б и 7, Мульти пликатор 6 записывает на леп.точпом носителе 8 информации, который паре мйщается со скоростью V, механизмом 9транспортировки ленты, изображение замкнутой сривой контура 2 N раз с периодом И. Мультрггшикатор 7 записывает на ленточном носителе 10информации, который перемещается со скоростью (,; ) механизмом 11 транспортировки, параллельно носителю 8, изобралшние замкнутой кривой контура 2 п раз с периодом . h(). При этом требуатс51, чтобы разность (H-h) была бы меньше любого из чисел и и h; pCZ, qSZ, натуральный ряд положительных чиселг наибольший общий делитель р и q равен единице; . . Зггписанные на носителя : 8 и 10 изображения замкнутой кривой кон тура 2 проявляются и закрепляются с помощью блока 12 формирования. В резуль тате на носителях 8 и 10 получают последовательность изображений кривых в виде решеток кривой контура. Затем с помощью осветителя 13 через объектив 14 равномерно освещают на уча.стке длиной ,8 перемещающиеся параллельно друг другу носители 8 и 10 информации. С помощью блока 15 фотоприемников через объектив 16 определяют количество света, которое проходит через носители информации. Это количество света пропорционально обцей площади совпадений поверхностей, ограниченных распознаваемыми замкну тыми кривыми на участке длиной -б. При этом общая площадь совпадений и, соответственно, количество света которое проходит через носители Информации, изменяется в соответствии с функциями сопрягаемых кривых с те чением времени.- Вход блока 15 подсоединен ко входу анализатора 17 спектра мощности, который вычисляет постоянную АО и переменную составляющую АИ спектра мощности сигнал с фотоприемников блока 15. Вычислен ные значения сравниваются в блоке 18 сравнения с эталонными значениям сигнала Ao3t и Kn3i / пoдaвae ШIMи из блока 19. Выходной сигнал блока 18 сравнения подается на вход блока 20 логики, который по результатам сравнения в блоке 18 определяет, относится ли распознаваемая фигура к определенному i-классу фигур или нет и дает команду исполнительному механизму 21, При этом в силу интегрального характера образования гармонических составляющих сигнгша чувствительность способа к изменению формы исходных кривых повьЕцаетоя с уменьшением разности (Н-Н), так как соответственно растет длина участка . , Для повышения надежности распозна вания число записей N контура распознаваемой фигуры можно выбирать следующего порядка N(10-20)p. Данный способ может быть использован при .диагностике технических объектов по динамическим характеpиcтикa,1 при анализе сложных графиков и диаграмм, в картографии для автоматического распознавания замкнутых контуров на карте, в биологии при распознавании плоских биологических объектов, а также при распознавании фигур по их проекциям. Формула изобретения Способ распознавания плоских фигур, заключающийся в преобразовании изображения в видеосигнал и записи преобразоззанного изображения на носитель информации, отличающийся тем, что, с целью повышения чувствительности распознавания, параллельно преобразованное изображение фигуры записывают на два носителя информации, причем на первый - N раз с периодом Н, а ja второй - п .раз с периодом h, соблюдая условия /H-h; {H,h}; j.. pCZ- , -qeZ+, где Z - ряд положительных целых чисел, а наибольший общий делитель р и q равен единице, затем перемещают один носитель относительно другого в параллельном направлении, измеряют изменение во времени общей площади совпадений проекций изображений на носителях на участок . - угол между плоскостью проекций и плоскостями носителей .Информации, определяют величины гармонических составляющих упомянутого изменения и сравнивают величины гармонических составляющих с эталонными, . Источники информации, принятые во внимание при экспертизе 1,Шибанов Г,П. Распознавание в системах автоконтроля. М., Машиностроение, 1973, с. 211, 226, 2,Патент Японии № 49-47967, кл. D7(7)B 41, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для распознавания образов | 1984 |
|
SU1241268A1 |
| СПОСОБ ОПОЗНАВАНИЯ ОБЪЕКТОВI ЙСЕПОЮЭНАй • •': •!-.-;, ,-i,:,?i т-''"'^-•::.••'.^.^i:^:.^-{':.:•,';, •1:•:.''.--";'.-Г vTiC^ | 1973 |
|
SU372564A1 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ОБРАЗОВ | 1998 |
|
RU2154302C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ МАТЕРИАЛЬНЫХ ОБЪЕКТОВ | 1999 |
|
RU2163394C2 |
| Устройство для распознавания образов | 1985 |
|
SU1387025A1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТОПОГРАФИИ ПОВЕРХНОСТИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2208370C2 |
| СПОСОБ РАСПОЗНАВАНИЯ ЗНАКОВ | 2008 |
|
RU2390843C2 |
| Устройство для распознавания изображений | 1983 |
|
SU1146700A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ПЛОСКИХ ФИГУР | 1991 |
|
RU2031443C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ПЛОСКИХ ФИГУР | 1992 |
|
RU2043657C1 |