(54) МАШИНА ДЛЯ РАЗРАБОТКИ ПОРОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для разработки пород способом обрушения | 1981 |
|
SU968400A1 |
| УСТРОЙСТВО ДЛЯ РАЗРАБОТКИ МЯГКИХ ПОРОД СПОСОБОМ ОБРУШЕНИЯ | 1971 |
|
SU305265A1 |
| Устройство для разработки мягких пород способом обрушения | 1980 |
|
SU891930A2 |
| УСТРОЙСТВО для РАЗРАБОТКИ МЯГКИХ ПОРОД СПОСОБОМ ОБРУШЕНИЯ | 1972 |
|
SU325382A1 |
| САМОХОДНАЯ УСТАНОВКА ДЛЯ ЛОКАЛИЗАЦИИ ВЗРЫВА | 2004 |
|
RU2276324C2 |
| АГРЕГАТ ДЛЯ БЕСТРАНСПОРТНОЙ СИСТЕМЫ РАЗРАБОТКИ | 1992 |
|
RU2034114C1 |
| ЭКСКАВАЦИОННО-ТРАНСПОРТИРУЮЩИЙ КОМПЛЕКС | 2011 |
|
RU2456454C1 |
| УСТРОЙСТВО ДЛЯ ПРЕДРАЗРУШЕНИЯ ГОРНЫХ ПОРОД | 2022 |
|
RU2816285C1 |
| Гидрокомбайн | 1986 |
|
SU1395831A1 |
| САМОХОДНАЯ УСТАНОВКА ДЛЯ ЛОКАЛИЗАЦИИ ВЗРЫВА | 2004 |
|
RU2266516C1 |
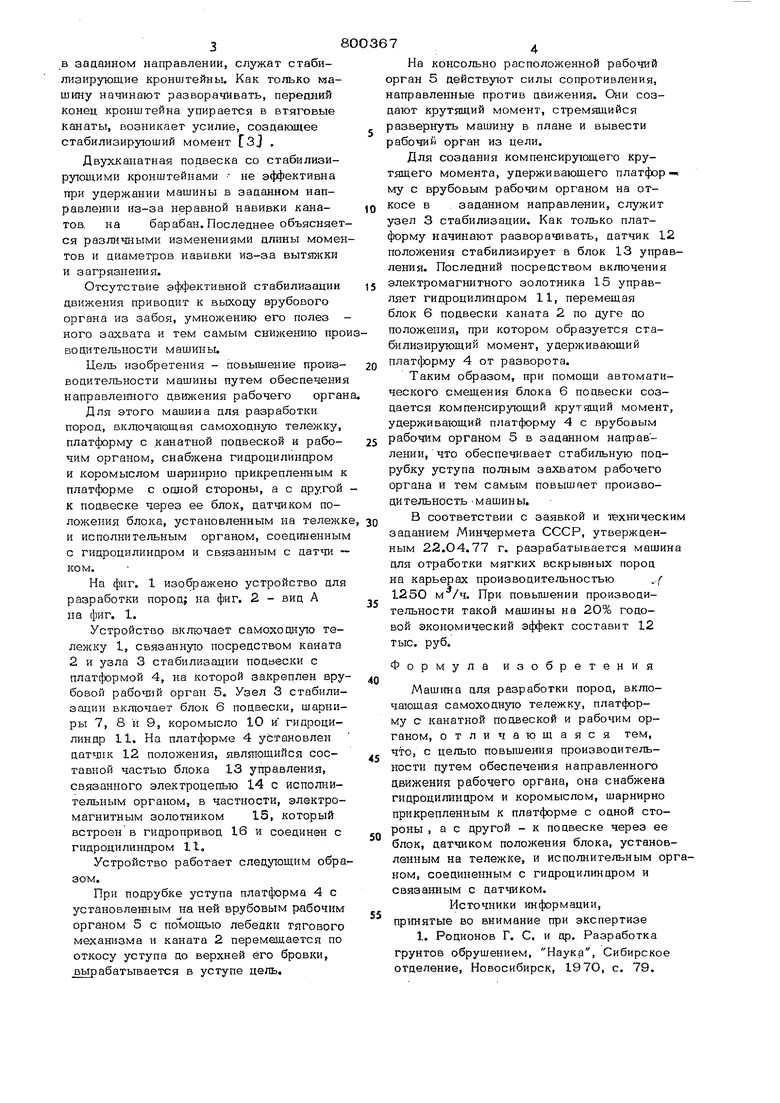
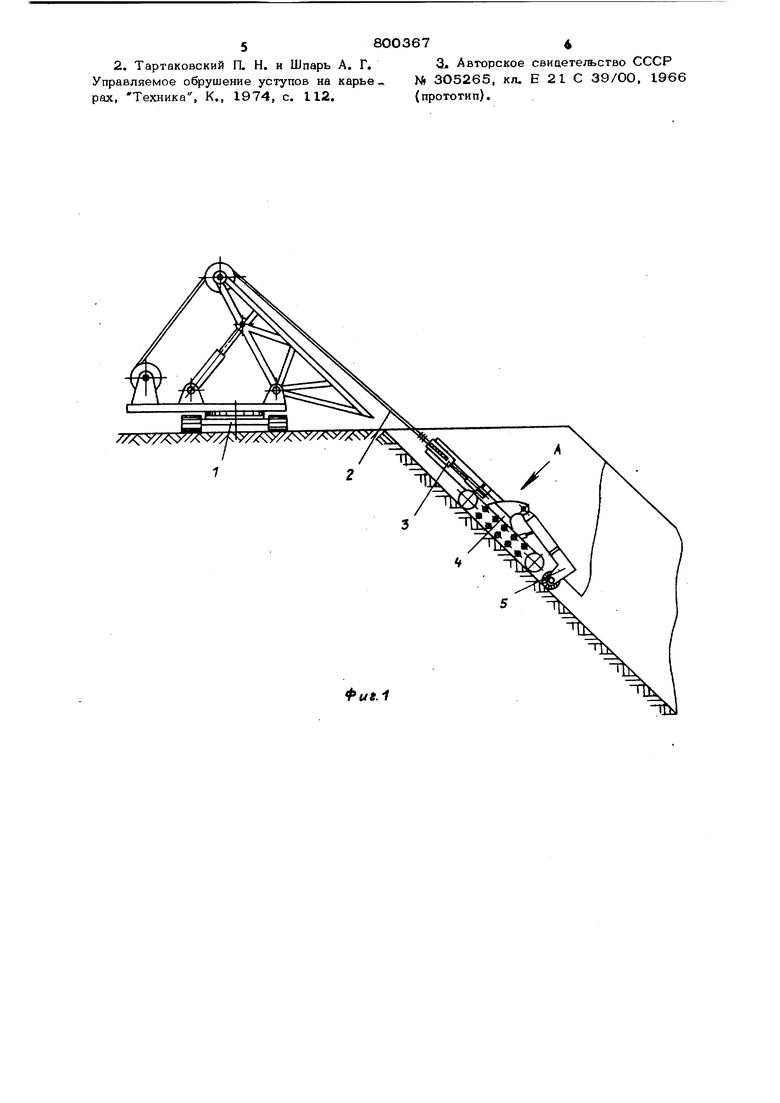
Изобретение относится к машинам, предназначенным для использования в горноруцной промышленности, и может найти применение на открытых горных разработках. Известно обрушение уступов крутыми слоями с использованием специальной врубовой машины для подрезки крутого слоя пород. Врубовая машина, перемещаясь по откосу уступа снизу вверх с помощью каната, прикрепленного к ее кор пусу, выполняет врубовую щель в основа нии крутого слоя пород. Крутой слой пор ды последовательно обрушается отдельны ми блоками. Обрушенная порода скатывае ся к основанию уступа, где отгружается специальной породопогрузочной маши ной 1 . Конструкция такой врубовой машины с постоянной точкой подчески каната не позволяет при работе установить направленное ее движение. Это объясняется тем, что напорная сила, действующая iHa консольно расположенный врубовой ра бочий орган, из-за различной крепости пород, изменяет свое значение. Измене:ние значения напорной силы при постоянной точке подвески приводит к появлению момента, который разворачивает машину в плане, при этом ее рабочий орган выходит из забоя. Выхоц врубового рабочего органа из забоя приводит к уменьшению его полезкого захвата, и тем самым, к снижению производительности машины. Известно устройство со стабилизирующей системой полиспастных блоков известных машин f 2 . Однако в этом устройстве нет взаимосвязи между механизмами подвески каната и изменений положения машиньи Кро -i ме того, конструкция полиспастных блоков очень громоздка. Известна также машина для разработки пород, включающая самоходную тележку, платформу с канатной подвеской и рабочим органом. Для создания крутящего момента, удерживающего машину на откосе в заданном направлении, служат стабилизирующие кронштейны. Как только машину начинают разворачивать, передний конец кронштейна упирается в втяговые канаты, возникает усилие, создающее стабилизируюший момент fsj , Двухканатная подвеска со стабилизирутоихими кронштейнами не эффективна при удержании машины в заданном направлении из-за неравной навивки канатов, на барабан. Последнее объясняет ся paaличIiыми изменениями длины моме тов и диаметров навивки из-за вытяжки и загрязнения. Отсутствие эс{х|)ективной стабилизации движения приводит к выходу врубового органа из забоя, умножению его полез ного захвата и тем самым снижению про водительности машиньи Цель изобретения - повышение производительности машины путем обеспечени направле шого движения рабочего орга Для этого машина для разработки пород, включаюш.ая самоходную тележку, платформу с канатной подвеской и рабочим органом, снабжена гидроцилиндром и коромыслом шарнирно прикрепленным к платформе с одной стороны, а с другой к подвеске через ее блок, датчиком положения блока, установленным на тележк и исполнительным органом, соедрщенны с гидроцилиндром и связанным с - ком, На фиг. 1 изображено устройство для разработки пород; на фиг. 2 - вид А на фиг. 1. Устройство включает самоходную тележку 1, связанную посредством каната 2 и узла 3 стабилизации подвески с платформой 4, на которой закреплен вру бовой орган 5, Узел 3 стабилизации включает блок 6 подвески, шарниры 7, 8 и 9, коромысло 10 и гидроцилиндр 11. На платформе 4 установлен дат1П1к 12 положения, являющийся составной частью блока 13 управления, связанного электроцепью 14 с исполнительным органом, в частности, электромагнитным золотником 15, который встроен в гидропривод 16 и соединен с гидроцилиндром 11. Устройство работает следующим обра При подрубке уступа платформа 4 с установленным на ней врубовым рабочим органом 5 с помощью лебедки тягового механизма и каната 2 перемезцается по откосу уступа до верхней его бровки, вырабатывается в уступе цель. На консольно расположенной рабочий орган 5 действуют силы сопротивления, направленные против движения. Они создают крутящий момент, стремящийся развернуть машину в плане и вывести рабочий орган из цели. Для создания компенсирующего крутящего момента, удерживающего платфор-« му с врубовым рабочим органом на откосе в заданном направлении, служит узел 3 стабилизации. Как только платформу начинают разворачивать, датчик 12 положения стабилизирует в блок 13 управления. Последний посредством включения электромагнитного золотника 15 управляет гидроцилиндром 11, перемещая блок 6 подвески каната 2 по дуге до положения, при котором образуется стабилизирующий момент, удерживающий плат(1юрму 4 от разворота. Таким образом, при помощи автоматического смещения блока 6 подвески создается компенсирующий крутящий момент, удерживающий платформу 4 с врубовым рабочим органом 5 в заданном направлении, что обеспечивает стабильную подрубку уступа полным захватом рабочего органа и тем самым повышает производительность -машины, В соответствии с заявкой и техническим заданием Минчермета СССР, утвержденным 22,04.77 г. разрабатывается машина для отработки мягких вскрывных пород на карьерах производительностью„/ 1250 м /ч. При повышении производительности такой машины на 2О% годовой экономический эффект составит 12 тыс. руб. Формула изобретения Машина для разработки пород, включающая самоходную тележку, платформу с канатной подвеской и рабочим органом, отличающаяся тем, что, с целью повышения производительности путем обеспечения направленного цвиженил рабочего органа, она снабжена гидроцилиндром и коромыслом, шарнирно прикрепленным к платформе с одной стороны , а с другой - к подвеске через ее блок, датчиком положения блока, установленным на тележке, и исполнительным органом, соединенным с гидроцилиндром и связанным с датчиком. Источники информации, пр гаятые во внимание при экспертизе 1. Родионов Г. С, и др. Разработка грунтов обрушением, Наука, Сибирское отделение, Новосибирск, 197О, с, 79.
58003674
Управляемое обрушение уступов на карье« NP ЗО5265, кл. Е 2 I С 39/00, 1966 pax, Техника, К., 1974, с. 112,(прототип).
ui.1
