Изобретение относится к горной, строительной и землеройной технике, в частности для гидромеханизированной разработки грунта при вскрьшных работах по добыче полезных ископаемых открытым способом с использованием принципа обрушения подрезанного снизу уступа.
Целью изобретения является повьше ние производительности разработки грунта путем совмещения по времени подрезки уступа и гидротранспортировки обрушившегося грунта и увеличение высоты разрабатываемых уступов
На фиг. 1 изображен гидрокомбайН; общий ВИД} на фиг.2 то же, вид сверхуо
Гидрокомбайн включает в себя ходовую теле жку 1, на которой размещена поворотная платформа 2 с механически и электрическим оборудованием, противовесом ЗУ кабиной 4 малгиниста с расположенным в ней пультом управления. Через полую ось 5, укрепленную на кронштейнах 6, поворотная платформа 2 шарнирно связана со стрелой 7, уде.рживаемой в вертикальной плоскости канатно-полиспастной системой 8 и стойкой 9, жестко закрепленной на поворотной платформе 2, На конце .стрелы 7 расположен рабочий орган 10 с приводом его вращения, В нижней част стрелы 7 установлены два боковых 11, а впереди сверху - один верхний 12 гидромониторы со своими водоводами 13, и электромеханическими задвижками 14 и 15, имеющими дистанционное управление .
Боковые нижние гидромониторы 11 установлены так, что в крайнем верхнем положении их продольные оси параллельны продольной оси рабочего органа 10 и находятся с нею на одном уровне, ВерхнМ гидромонитор 12 расположен над рабочим органом 10 и в среднем положении также параллелен ему. Гидромониторы 11 и 12 соединены с внешней водоводной сетью, крепящейся к фланцу 16, посредством шарнирного водовода, включающего в себя не подвижный водовод 17s, закрепленный кронштейном 18 к ходовой тележке 1 и вертикальным шарниром 19 к поворотной платформе 2, подвижный водовод 20, закрепленный в вертикальном шарнире 19 и горизонтальном шарнире 21, полую ось 5, задвижки 14 и 15 и водоводы 13. Причем вертикальный шарнир
0
5
0
5
0
0
5
0
5
19 расположен на оси вращения поворотной платформы 2, а горизонтальный шарнир 21 -на оси вращения стрелы 7, Для исключения жесткой связи между ходовой тележкой 1 и поворотной платформой 2, которая в процессе работы может колебаться, неподвижный водовод 17 снабжен компенсатором 22 вибрационных нагрузок. Фланец 16 соединен с водоводом 17 через шарнир 23, что дает возможность устанавливать его в удобном для стыковки с внешней водоводной сетью положении.
Принцип работы предлагаемого гидрокомбайна следующий.
С пульта управления, размещенного в кабине 4 машиниста, включается механизм подъема стрелы, который приводит в движение канатно-полиспастную систему 8, соединяющую стойку 9 и стрелу 7. При этом рабочий орган 10 устанавливается на необходимой высоте поворотом стрелы 7 вокруг оси 5, закрепленной кронштейнами 6 к поворотной платформе 2. В горизонтальной плоскости рабочий орган 10 устанавливается в необходимом положении поворотом платформы 2 со стрелой 7. После этого при помощи ходовой тележки 1 гидрокомбайн подъезжает к забою, включается привод движения рабочего органа 10, от внешней сети начинает подаваться вода к гидромониторам 11 и 12.
Внешняя водоводная сеть присоединяется к фланцу 16, который для удобства стыковки выполнен поворачивающимся в шарнире 23. Вода от внешней сети поступает через неподвижный водовод 17 к вертикальному шарниру 19, установленному на оси вращения поворотной платформы 2 и позволяющему передавать поток воды в .подвижный водовод 20. Последний, в свою очередь, соединен горизонтальным шарниром 21 с полой осью 5 вращения стрелы 7, Это позволяет потоку воды поступать к гидромониторам 11 и 12 через задвижки 14, 15 и водоводы 13. Задвижки 14 и 15 осуществляют коммутацию и регулирование проходного сечения водоводных каналов 13 гидромониторов 11 и 12. Такой шарнирньй водовод позволяет осуществить подачу воды к гидромониторам 11 и 12 при любом рабочем положении стрелы 7 и платформы 2 гидрокомбайна.
Подача рабочего органа 10 на забой осуществляется вращением платформы 2 вместе со стрелой 7. При этом рабочий орган 10, непрерывно создавая внизу слоя уступа врубовую щель, подрезает грунт, которьш периодически падает, отрываясь от целика, на почву забоя, размельчается при ударе и смывается струями гидромониторов 11, двигающимися синхронно с рабочим органом 10, так как расположены они с ним на одной стреле 7. Гидромониторы 11 расположены в нижней части стрелы 7 для повышения эффективности их работы по гидротранспортировке и зачистке забоя и имеют дистанционное управление их положением в горизонтальной и вертикальной плоскостях. Причем боковое расположение позволяет направлять струн гидромониторов в любое место забоя справа и слева от стрелы 7. Кроме того, они установлены так, что их продольные оси в крайнем верхнем положении параллельны продольной оси рабочего органа 10 и находятся с нею на одном уровне, что позволяет проводить гидротранспортировку в нижнем положении стрелы 7
вращением стрелы 7 выполняются осевые перемещения ходовой тележки 1,
Для отработки верхних слоев уступов с высотой, превышающей допустимую для использования рабочего органа 10, применяется верхний гидромонитор 12, расположенньй на переднем конце стрелы 7, приближенным к забою. При этом
0 каналы гидромониторов 11 перекрываются задвижками 14, что превышает эффективность работы верхнего гидромонитора 12, т„е повьшает напор его струи. Кроме того, он установлен так.
5 что его продольная ось в среднем положении параллельна продольной оси рабочего органа 10, это позволяет не только проводить отработку верхнего слоя уступа при поднятом положении
0 гидромонитора 12 но при необходимости очищать рабочий орган 10 от налипшего грунта при нижнем положении гидромонитора 12, Работа верхнего гидромонитора 12 заключается в подрезке,
5 разрушении и гидротранспортировке
верхнего слоя уступа струей воды, направление которой может изменяться в вертикальной и горизонтальной плос- I костях перемещением ствола гидромо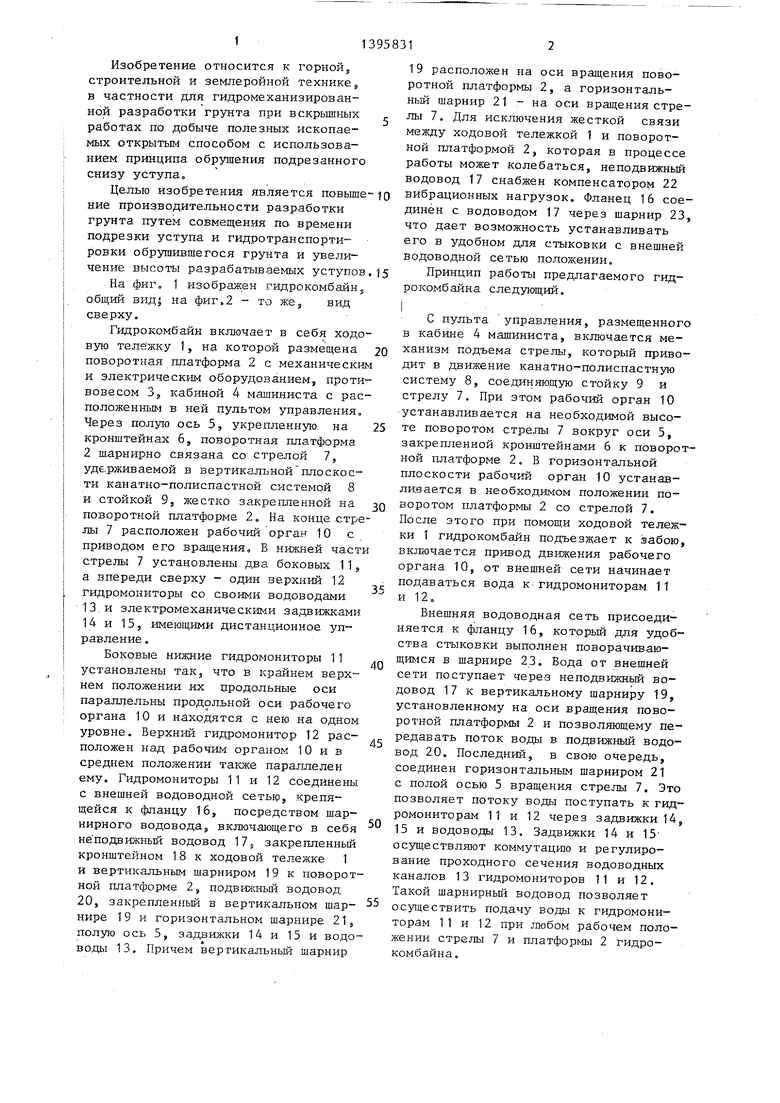
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидрокомбайн | 1989 |
|
SU1659661A1 |
| Гидрокомбайн | 1988 |
|
SU1622592A2 |
| Гидрокомбайн | 1988 |
|
SU1567777A1 |
| Экскаватор-драглайн | 1989 |
|
SU1682479A1 |
| Способ гидромеханизированной разработки трудноразмываемых грунтов | 1987 |
|
SU1624151A1 |
| Роторный экскаватор | 1987 |
|
SU1565969A1 |
| УСТРОЙСТВО ДЛЯ ОТРАБОТКИ ОТКОСОВ УСТУПОВ | 2016 |
|
RU2618806C1 |
| Роторный экскаватор | 1990 |
|
SU1752876A1 |
| Машина для разработки пород | 1979 |
|
SU800367A1 |
| ГИДРОМОНИТОРНАЯ УСТАНОВКА С ТРУБОПРОВОДОМ ПЕРЕМЕННОЙ ДЛИНЫ | 2010 |
|
RU2459075C1 |
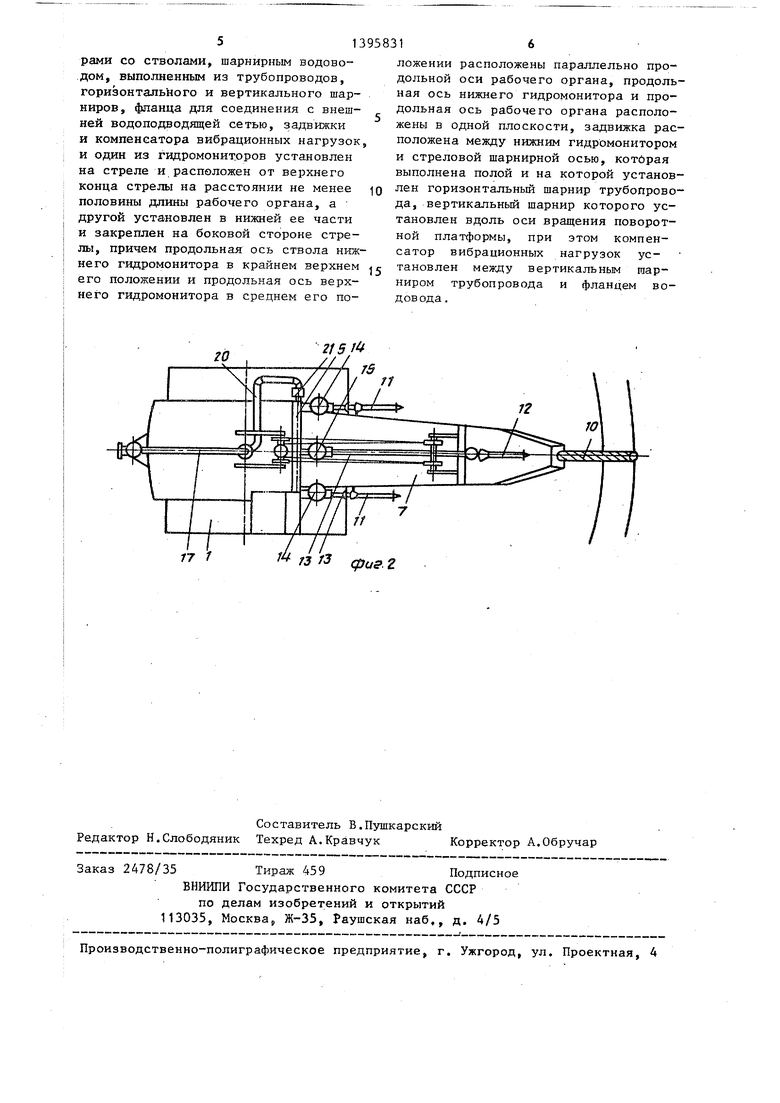
Изобретение относится к горной, строительной и землеройной технике. Цель - повьшение производительности разработки грунта путем совмещения по времени подрезки уступа и гидротранспортировки обрушившегося грунта и увеличение высоты разрабатьгоаемых уступов. Для этого на конце стрелы (с) 7 расположен рабочий орган (РО) 10, в нижней части С 7 установлены два боковых гидромонитора (ГМ) 11, а сверху С 7 установлен ГМ 12. Каждьй из Ш 11, 12 имеет водоводы 13 и задвижки с дистанционным управлением. Боковые ГМ 11 установлены так, что S S в крайнем верхнем положении их продольные оси параллельны продольной оси РО 10 и находятся с ним на одном уровне. Через полую ось 5 поворотная платформа шарнирно связана со С 7. На оси 5 установлен горизонтальный шарнир трубопровода. Вертикальный шарнир трубопровода расположен на оси вращения поворотной платформы. Для исключения жесткой связи между ходовой тележкой 1 и поворотной платформой неподвижный водовод 17 имеет компенсатор вибрационных нагрузок, установленньп между вертикальным шарниром трубопровода и фланцем водовода. Задвижки осуществляют коммутацию и регулирование проходного сечения водоводов 13. За счет установки РО 10 и ГМ 11 на одной С 7 происходит одновременная подрезка грунта и его гидротранспортировка. Для обработки верхних слоев уступов с высотой, превьштающей допустимую для использования РО 10, применяется Ш 12. При этом каналы ГМ 11 перекрыты задвижками 14, что повьш1ает напор струи ГМ 12. 2 ил. с (О OQ СО сд 00 ОО Iftttf.t
при подрезке уступа в его основании, ЗО нитора 12 или стрелы 7«
а также при необходимости вымывать оставшийся грунт из врубовой щели при подрезке. Подрезка и гидротранспортировка грунта осуществляются одновременно. После завершения отработки слоя уступа рабочий орган 10 устанавливается в новое положение - на высоту следующего подрезаемого слоя поворотом стрелы 7 в вертикальной плоскости, процесс повторяется. Верхний гидромонитор 12 в этом случа закрыт задвижкой 15, а, чтобы обезопасить его от падающего грунта, он расположен на расстоянии половины длины рабочего органа 10 от переднего конца стрелы 7. Это расстояние определяется тем, что при создании врубовой щели рабочий орган 10 углублен в уступ наполовину, а подрезаемый слой может достигать по высоте полной длины рабочего органа 10. При необходимости подрезка может осуществляться и в вертикальной плоскости. В этом случае подача рабочего органа 10 выполняется поворотом стрелы 7 вокруг оси 5 изменением длины полиспастной системы 8, закрепленной к стойке 9. Для поддержания постоянной глубины вруба одновременно с
При механической подрезке слоя уступа рабочим органом i О на последнем возникают переменные силы, в частности, резания, приводящие через стре-лу 7 и полиспастную систему 8 к коле- баниям поворотной ШIaтфop iы 2, которые могут привести к поломке неподвижного водовода 17, один конец которого закреплен кронштейном 18 к ходовой тележке 1, а другой - вертикальным шарниром 19 к поворотной платформе 2. Для исключения данного явления между частями неподвижного водовода 17 установлен компенсатор 22 вибрационных нагрузок.
Формула изобретения
0
Гидрокомбайн, включающш ходовую тележку, поворотную платформу, соединенную через шарнирную ось со стрелой, рабочий орган, установленный на переднем конце стрелы, полиспастную систему, о тличаюций ся тем, что, с целью повьш1ения производительности путем обеспечения одновременной подрезки и транспортировки грун- та и увеличения высоты разрабатываемых уступов, он снабжен гидромониторами со стволами, шарнирным водоводом, выполненным из трубопроводов, горизонтального и вертикального шарниров, фланца для соединения с внешней водоподводящей сетью, задвижки и компенсатора вибрационных нагрузок и один из гидромониторов установлен на стреле и расположен от верхнего конца стрелы на расстоянии не менее половины длины рабочего органа, а другой установлен в нижней ее части и закреплен на боковой стороне стрелы, причем продольная ось ствола нижнего гидромонитора в крайнем верхнем его положении и продольная ось верхнего гидромонитора в среднем его по20
17 1
ложении расположены параллельно продольной оси рабочего органа, продольная ось нижнего гидромонитора и продольная ось рабочего органа расположены в одной плоскости, задвижка расположена между нижним гидромонитором и стреловой шарнирной осью, котбрая выполнена полой и на которой установлен горизонтальный шарнир трубопровода, вертикальньш шарнир которого установлен вдоль оси вращения поворотной платформы, при этом компенсатор вибрационных нагрузок установлен между вертикальным шарниром трубопровода и фланцем водовода.
cpus.2
| Уголь, 1968, № 11, с | |||
| Приспособление для автоматической односторонней разгрузки железнодорожных платформ | 1921 |
|
SU48A1 |
| Авторское свидетельство СССР № 369264. | |||
